防护与作业一体化升降平台与结构外附施工设备的协同建造
2020-04-09潘曦
潘 曦
1. 上海建工集团股份有限公司 上海 200080;2. 上海建筑工程工业化建造工程技术研究中心 上海 201114
防护与作业一体化升降平台是一种具备外围全封闭防护与提供作业空间双重作用的新型施工装备,采用由电机驱动的自动升降双层操作平台,可以代替传统的围护脚手架和吊篮,用于主体结构和装饰装修一体化施工[1-6]。当其应用于建筑工程施工时,需通过导轨架附着在结构外立面上,并对整个建筑结构外围进行环绕布置,从而最大化发挥防护作用。但在高层以及超高层建筑施工时,建筑结构的外立面通常还布设有施工升降机和外附式塔吊[7-8],因此,存在防护与作业一体化升降平台与施工升降机、塔吊等结构外附施工设备共同运行的工况。多种施工机械设备的运行环境相互制约、相互影响,需要在前期方案制定阶段进行精细化规划设计,以实现多设备高效协同作业。
防护与作业一体化升降平台与施工升降机协同作业的难点,在于传统施工升降机由于齿条设置方位的原因无法同防护与作业一体化升降平台的操作平台共轨升降。在采用防护与作业一体化升降平台进行主体结构施工的建筑结构工程中,如果独立安装施工升降机,则会产生材料浪费、重复作业以及多种形式导架相互干扰的问题,无法发挥各类垂直运输设备的综合协同优势。
防护与作业一体化升降平台与塔吊协同作业的难点,在于塔吊附墙杆对操作平台的升降运行路径形成阻碍。塔吊与墙面距离较大,防护与作业一体化升降平台可设置于塔吊与墙面之间的位置,如采用传统的施工方法,即在塔吊附墙杆范围的整个垂直区域,不布置防护与作业一体化升降平台,则会留下较大范围的建筑外立面结构施工缺口,使后期采用搭设悬挑脚手架施工时增加额外的人力成本,降低施工效率,并产生较大的安全风险。
1 防护与作业一体化升降平台布置方案
以某装配式建筑工程项目为例,布设的防护与作业一体化升降平台施工方案如图1所示。建筑物总高48.9 m,地下1层,地上14层,总建筑面积约6 000 m2,标准层高3 m。共设置了6组12个机位的防护与作业一体化升降平台用于外立面施工,建筑物南侧中部位置设置QTZ200自升式塔吊,为提升塔身工作状态下的稳定性,设置1道附墙杆与建筑结构连接。在主体结构施工阶段,由于防护与作业一体化升降平台跟随结构作业面向上爬升,故无法进行垂直运输,为提高该阶段的人员和物料垂直运输效率,还需要设置1部施工升降机。在该项目方案中,防护与作业一体化升降平台与施工升降机、塔吊的协同配合是结构外立面施工需要解决的重点问题。

图1 防护与作业一体化升降平台施工方案
2 升降平台与施工升降机协同作业
2.1 新型施工升降机设计
施工升降机是建筑工程中常用的载人载货施工机械,主要由轿厢、驱动系统、导轨架、附墙架、底盘、电气系统等部分组成,通过电机驱动轿厢沿导轨架进行垂直升降,驱动系统置于轿厢顶上方,轿厢顶部还设置有吊杆,用来安装导轨架标准节,四周设置栏杆,以便于驱动系统检修保养。施工电梯一般采用双笼体形式,即每个导轨架的两侧分别设置轿厢与驱动系统,共有2套可以各自独立沿导轨架升降的轿厢,这种施工升降机也经常与塔吊、爬升模架等机械设备配合施工。
采用齿轮齿条传动的施工电梯导轨架同防护与作业一体化升降平台的导轨架结构形式相似,均由型钢框架标准节首尾连接而成,其标准节高度根据齿条模数一般为1 508 mm,但两者的布置方向和齿条设置有所区别。从平面上看(图2),施工升降机导轨架的立柱连杆垂直于墙面,每个导轨架标准节有2个齿条,而防护与作业一体化升降平台的导轨架标准节的水平截面则旋转90°,其立柱连杆平行于墙面,并且每个导轨架标准节上只在远离墙面的外侧设置了1个齿条,因此防护与作业一体化升降平台的导轨架无法安装传统的施工升降机。
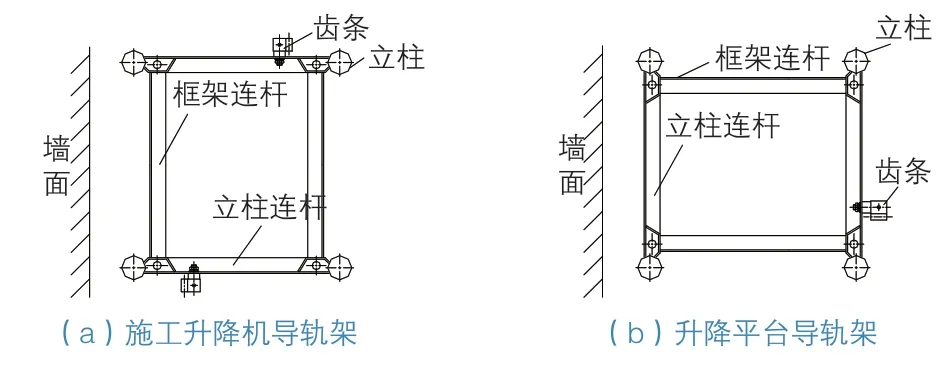
图2 升降平台与施工升降机的导轨架横截面对比
基于对传统施工升降机驱动系统和轿厢结构形式的改进,设计了一种机位内置的凹形截面单厢施工升降机(图3),可实现同防护与作业一体化升降平台共轨升降,充分发挥综合协同高效作业优势,增加导轨架的利用率,进一步提高施工效率。
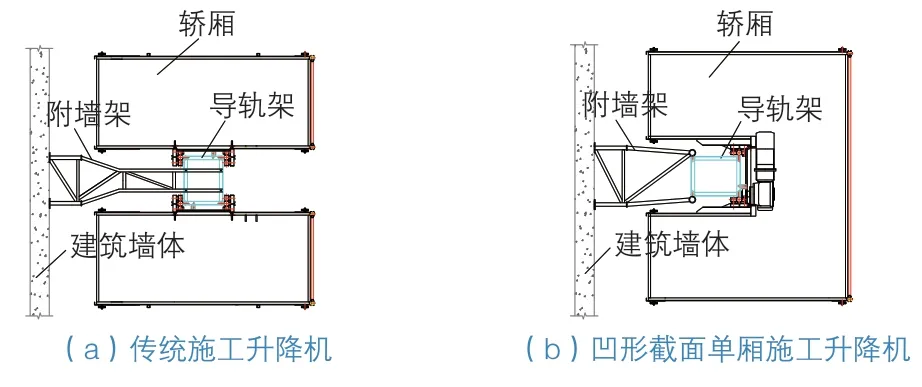
图3 传统施工升降机与凹形截面单厢施工升降机对比
该新型施工升降机主要由驱动系统、电气控制系统、轿厢、水平加强连杆等组成(图4)。

图4 凹形截面单厢施工升降机构成
驱动系统包括驱动框架、电动机、防坠器、电机安装板、防坠器安装板、滚轮。驱动框架为型钢焊接制成的带有多根横杆的矩形框架结构,驱动框架中部设置有电机安装板,其上通过螺栓法兰安装2~3个电动机,驱动框架下部设置防坠器安装板,通过螺栓法兰安装1个防坠器。驱动框架设置在凹形轿厢的中部位置,驱动框架四周与轿厢架体杆件以焊接或螺栓连接的方式固定连接,电动机、防坠器均位于轿厢内部,驱动框架上安装有若干滚轮,滚轮可紧扣导轨架立柱进行上下滚动,从而使驱动框架沿导轨架垂直升降。电气控制系统包含变频装置和PLC控制模块,用于控制施工升降机的自动运行。轿厢是由型钢杆件、钢板及冲孔钢板焊接或螺栓连接而成的箱形结构体,用于提供人员及物料输送空间,其水平截面为凹形结构,单个轿厢包含2个后厢门和1个前厢门,后厢门靠近建筑结构墙面,前厢门位于导轨架外侧。为了加强驱动框架与轿厢的连接整体性,在驱动框架两侧分别间隔设置了若干道水平加强连杆。水平加强连杆为型钢管件,分别与驱动框架架体和轿厢架体牢固焊接。
该新型施工升降机的主要优势在于驱动系统的安装方向和方式均同防护与作业一体化升降平台相同,因此,2种设备可以共用导轨架进行自动升降。此外,驱动系统置于轿厢内部,便于检修保养,并降低施工升降机整体高度,减小了对上方操作平台的影响。
2.2 施工升降机布置方案与防护措施
凹形截面单厢施工升降机可安装在防护与作业一体化升降平台的操作平台下方导轨架上,与操作平台进行共轨升降协同施工,每个导轨架可安装1个单厢施工升降机,可根据施工现场实际需求设置单厢施工升降机的安装数量与位置(图5)。
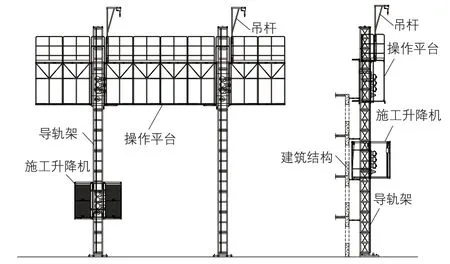
图5 凹形截面单厢施工升降机布设
为了避免施工升降机与上方的操作平台发生碰撞,可设置必要的防碰撞装置和采取相应的安全防护措施。在单厢施工升降机上方、操作平台的下方分别设置位移传感装置,实时监测2个设备的间距,在距离较近时发出声光报警。施工升降机的驱动框架顶部设置行程开关,同时,在距操作平台底部一定范围的导轨架上,设置可跟随操作平台升降的移动式限位装置,当单厢施工升降机上升至该限位装置处时会触发行程开关而自动停机,从而保证施工升降机与升降平台之间的安全距离。
3 操作平台避让塔机附墙杆的施工方法
在主体结构施工阶段,防护与作业一体化升降平台的操作平台位于主体结构顶部施工区域,塔吊附墙杆的安装一直在操作平台下方进行,不存在相互碰撞问题。但在装饰装修阶段,操作平台需通过往复升降进行墙体结构施工,塔吊附墙杆的存在会对其运行路径造成阻碍。虽然在一些工程中采用特定的施工程序可以避免此种工况,比如在塔吊拆卸后再由操作平台边下降边自拆收尾。但为彻底解决这一技术难题,提出了借助可开合操作平台标准节模块避让塔机附墙杆的施工方法。
3.1 可开合操作平台标准节模块
防护与作业一体化升降平台的操作平台穿越塔吊附墙杆升降的总体思路:在方案设计阶段,将防护与作业一体化升降平台的2个导轨架分别布置在塔吊的两侧,在2个导轨架上分别安装各自的驱动系统和操作平台标准节,当操作平台下降或上升至接近塔吊附墙杆时,控制操作平台的运行速度,在升降过程中使操作平台各层的横杆、走道翻板、围护网板依次伸缩或开合,逐步穿越塔吊附墙杆。
为此,塔机附墙杆位置处的操作平台标准节需要采用专项设计(图6)。操作平台标准节的顶层、中层和底层的水平钢梁下方,分别固定3层套管,每层设置2个套管,伸缩杆穿入套管内部,并可在套管内部滑动,每层的2个伸缩杆穿出套管的端头通过连杆连接,连杆中部设置丝套,丝杆从丝套中穿过,并由电机驱动,电机通过固定杆与套管连接,当电机驱动丝杆进行正反转时,可带动伸缩杆在套管内进行往复水平移动。伸缩杆的另一端设置有销轴连接头,可通过销轴与对向的伸缩杆端部连接形成铰接约束,从而将塔吊两侧的操作平台标准节连接形成一个整体操作平台。上伸缩杆、下伸缩杆的上方分别铺设翻板,翻板靠近套筒的端部设置铰链,翻板以铰链为轴可向上旋转翻起。在伸缩杆及翻板的外侧安装2个对开的围护网板,围护网板靠近操作平台标准节的侧边通过若干铰链固定在平台标准节的立杆上,围护网板可向外侧翻转与折叠。通过上述附加装置和措施,在塔吊附墙杆处形成可开合的操作平台标准节模块。
3.2 操作平台避让塔吊附墙杆的施工流程
当操作平台从塔吊附墙杆下方开始向上爬升时,其避让塔吊附墙杆的流程如下:
1)驱动操作平台沿导轨架爬升,操作平台的顶部运行至塔吊的附墙杆下方一定距离时,暂停爬升,将塔吊附墙杆下方的围护网板向外翻开,并固定在相邻的操作平台标准节上,将上层走道的上翻板翻转到竖直位置,解除上伸缩杆端部的铰接约束,再将上伸缩杆分别向两侧相邻操作平台标准节内收回,从而形成能够容纳塔吊附墙杆的空间,之后再缓慢爬升操作平台。
2)当塔吊附墙杆位于上伸缩杆与中伸缩杆之间的位置时,暂停爬升,将上伸缩杆伸出并重新将杆端部通过销轴连接,将上翻板向下翻转,使其重新搁置在上伸缩杆上,解除中伸缩杆端的铰接约束,再将中伸缩杆分别向两侧相邻操作平台标准节内收回,将下翻板翻转到竖直位置,再启动操作平台进行缓慢爬升。

图6 操作平台避让塔机附墙杆升降方法示意
3)当塔吊附墙杆位于中伸缩杆与下伸缩杆之间的位置时,暂停爬升,将中伸缩杆伸出,并重新将杆端部通过销轴进行连接,解除下伸缩杆端铰接约束,再将下伸缩杆向相邻操作平台内侧收回,然后继续缓慢爬升,使操作平台标准节通过塔吊附墙杆。
4)待塔吊附墙杆位于下伸缩杆下方后,将下伸缩杆伸出并恢复杆端部的铰接约束,将下翻板向下翻转,使其搁置在下伸缩杆上方,将两侧的围护网板翻转闭合,从而完成穿越塔机附墙杆的流程。
当遇到多道塔吊附墙杆时,重复以上步骤,可将操作平台穿越塔吊附墙杆爬升至既定位置。当操作平台下降的过程中遇到塔吊附墙杆时,逆向重复上述步骤即可。
3.3 升降过程安全防护措施
采用信息化监控技术是保障操作平台穿越塔吊附墙杆进行安全升降的有效措施。可在塔吊附墙杆上安装位移基站,同时在操作平台与3道伸缩杆等高位置处分别设置定位标签,位移基站与定位标签采用无线方式进行组网,自动感知各道伸缩杆与塔吊附墙杆的垂直距离,从而判断塔吊附墙杆与各道伸缩杆的相对位置。
在操作平台上设置工控机和报警装置,位移基站与工控机采用无线连接,可将定位标签与位移基站的垂直距离位置信息发送至工控机,工控机根据距离限制控制报警装置发出相应的声光警报和停机信号,保障最小安全距离。
翻板、围护网板闭合处可安装行程开关,当翻板、围护网板未按照正确流程完全闭合,即行程开关未完全触碰到位时,禁止操作平台升降运行,防止发生坠落事故。
4 结语
建筑结构建造是多种机械设备协同作业的综合工程。采用防护与作业一体化升降平台施工时,常会遇到与其他施工设备相互影响、相互协调的情况,本文从技术研究的角度出发,提出了一种机位内置的凹形截面单厢施工升降机,驱动系统设置于轿厢内部,便于维修保养,轿厢水平截面为凹形结构,可安装在防护与作业一体化升降平台的下方进行共轨升降,用于垂直运输物料及人员,充分发挥高效协同作业优势,有效提升了导轨架的利用率和施工效率;提供了防护与作业一体化升降平台避让塔机附墙杆的施工方法,可使操作平台穿越塔吊附墙杆进行垂直升降,并且在穿越避让过程中,通过自动化伸缩与开合作业,操作平台在垂直方向上始终保持2层伸缩杆的连接,保障了操作平台整体运行安全,实现防护与作业一体化升降平台对建筑结构全围护布置,避免了防护缺口,可有效解决传统方法后期施工人力成本高、安全风险大等问题,有效提升建筑结构外立面的施工工效。
当然,实际建筑工程均有着系统上的复杂性,应根据施工项目具体情况进行分析,因地制宜采用高效的建造机械设备与协同作业模式,从而取得最大化的综合效益。
