软土地铁深基坑围护结构侧向变形的主动控制技术
2020-04-09孙九春白廷辉廖少明
孙九春 白廷辉 廖少明
1. 腾达建设集团股份有限公司 上海 200122; 2. 上海市国有资产监督管理委员会 上海 200003; 3. 同济大学 上海 200082
在软土地层中,基坑施工往往会引起极强的环境效应,导致邻近建(构)筑物产生不均匀沉降甚至开裂破坏,影响其正常运营和使用[1]。为此,以刘建航院士为代表的广大学者提出了基坑工程的“时空效应”理论,通过挖土及支撑时效的控制,有效减少了软土深基坑开挖引起的变形及其对周边环境的影响,极大地推动了软土基坑开挖及支护技术的发展[2-3]。
但随着基坑规模及深度加大以及环境条件变得越来越复杂,传统基坑施工技术越来越难以适应基坑周边更加严苛的环境保护要求。近10年来,由于在软土地铁深基坑中钢支撑轴力能有效控制基坑围护的侧向变形,因此为减少轴力损失的影响发明了轴力补偿系统,通过实时轴力监测来补偿损失的轴力,从而实现轴力的主动控制,有效克服了传统钢支撑后续轴力变化不完全可知、不可控、不便于调整等缺点[4]。
由于轴力伺服系统解决了轴力损失可能带来的基坑变形影响,因而得以广泛应用[5-6]。但是轴力伺服系统仅解决了轴力损失的问题,控制的目标是支撑轴力,当轴力与位移的对应关系比较一致时,位移的控制效果会比较好;当二者差异较大时,即使应用了伺服系统,位移的控制效果也往往不尽如人意[7]。
目前,伺服系统只实现了基坑轴力的主动控制,并没有实现基坑变形的主动控制。
为真正实现软土地铁深基坑的主动控制,需要着重解决以下问题:
1)支撑轴力与变形的对应性问题。在传统的基坑设计中,通常把钢支撑预加轴力作为一项控制措施使用,支撑预加轴力一般取整个开挖过程中钢支撑轴力包络效应最大值的0.5~0.8倍,轴力值与围护结构变形之间没有必然关系[8]。
2)软土流变的影响问题。在软土地铁深基坑中,土体的流变特性对基坑变形有着重要影响,而且难以精确计算与控制[9]。
3)支撑轴力调控的单一性问题。目前,钢支撑轴力伺服控制系统一般采用静态单一目标法来控制轴力[10]。考虑到基坑的复杂性以及众多的影响因素,基坑的力学模型很难与实际状态一致,甚至计算结果与实测结果有较大的差异,静态单一目标法难以满足基坑的主动控制需要。
本文依托实际工程,针对上述问题展开分析,研究主动控制在采用自动伺服系统的深基坑开挖中围护变形控制的实际应用效果。
1 软土地铁深基坑围护侧向变形的主动控制原理与控制策略
自动伺服控制系统可以根据需要对任意数量的钢支撑实时施加轴力,且轴力保持不变,实现了二维计算理论与三维施工实践的统一。在此基础上,利用轴力与变形、流变的相关性,建立支撑轴力与围护侧向变形控制策略,形成了一套基于钢支撑轴力的深基坑围护侧向变形主动控制方法。
1.1 深基坑围护侧向变形的控制理念
由于影响基坑变形的因素很多,单纯的伺服控制并不能完全解决基坑变形的控制问题,应当结合伺服系统的优势,综合考虑各方面因素,建立全面的深基坑控制理念。
1)科学审慎地确定基坑周边的环境保护要求,合理确定基坑侧向变形和支撑轴力的控制指标[11-12]。围护结构的侧向变形控制目标往往取决于周边环境对地层变形的适应能力,过于严苛的变形控制指标会提高对支撑轴力的控制要求,过大的轴力会带来支撑失稳的风险,不利于基坑的安全。
2)统筹协调钢支撑与混凝土支撑的设置[13]。采用伺服系统的钢支撑侧向变形控制效果好,但系统安全性比混凝土支撑低;而混凝土支撑虽然安全性好,但其施工期间的无支撑暴露时间长,同时作为刚性约束点,不能进行轴力调整,不能与相邻支撑形成协同加载,控制变形效果差。因此,钢支撑与混凝土支撑的设置需要统筹系统安全与变形控制确定。
3)时空效应与伺服系统的关系。软土的流变特性会导致围护结构产生显著的侧向变形,因此“时空效应”仍然是软土基坑变形控制的核心,是主要控制手段,伺服系统是在“时空效应”的基础上进一步提升变形控制的效果,是辅助手段,二者主次不可颠倒。
因此,综合各方面的因素,深基坑的变形控制理念是环境保护与基坑安全并重、钢混支撑设计协调、“时空效应”与伺服应用主辅分明,同时该理念是深基坑变形主动控制的基础[14]。
1.2 基于结构影响性的围护侧向变形主动控制原理
1.2.1 结构影响性原理
对于连续的结构体系,根据变形协调原理,某些构件力学参数的调整必然会对其他构件的力学参数产生影响,这种现象被称为结构的影响性。这种影响性奠定了基坑主动控制的基础。对于基坑的强度与刚度控制,力学参数主要是支撑轴力、围护结构的弯矩与剪力、围护结构变形、坑内外土体荷载等,这些力学参数任意一个的改变都会对其他产生影响。但在基坑的主动控制中,能够主动改变的力学参数主要是支撑轴力,因此其结构的影响性主要体现在以下3个方面:
1)支撑轴力对围护结构内力和变形的影响,即支撑轴力的调整会改变围护结构的弯矩、剪力及变形。
2)轴力相干性,即一根支撑轴力的改变会对其他邻近支撑的轴力产生影响,此种影响在本文中称之为轴力相干性。由于软土地铁基坑围护结构具有竖向和纵向刚度,因此这种相干性是空间相关的。
3)支撑轴力对坑内土体流变的影响。由于坑内土体与支撑共同平衡着坑外土压力与荷载,支撑轴力的改变必然会影响坑内土体的应力水平,而坑内土体的应力水平又与坑内土体的流变大小有关。
轴力对围护结构内力变形、坑内土体流变的影响以及支撑之间的轴力相干性是结构影响性原理在基坑主动控制中的三大应用。
1.2.2 基于结构影响性原理的围护侧向变形主动控制思路
在基坑施工过程中,围护结构上的荷载是逐步施加的,其间有围护变形、土体流变、边界约束增减、体系转换等过程,前期结构的内力和变形,直接影响后期结构乃至竣工后结构的力学性能,这就需要对整个过程进行主动控制。坑内土体开挖后产生的坑内外荷载差是围护结构产生变形的原因,而荷载差又是由坑外荷载(坑外水土压力和其他荷载)、坑内土体抗力以及支撑轴力的不均衡所产生的,其中除了坑内土体所提供的抗力是被动承受外,传统工艺下支撑轴力也是被动地承受坑外荷载,支撑轴力可称之为被动轴力。在应用伺服系统后,支撑不再是单纯的被动受力,而是具有了主动、实时调整轴力的功能,这种轴力称之为主动轴力,主动轴力成为实现变形控制的主要手段。
因此,基坑主动控制的过程就是运用现代控制理论和数值仿真技术,根据结构理想状态、现场实测状态和误差信息进行误差分析,依据结构的影响性原理,通过支撑轴力的主动调整来实现围护结构侧向变形的精细化控制,从而使结构的实际状态趋于理想状态。由于支撑轴力是有限值的,在控制变形的过程中轴力值不能超过支撑轴力的限值,因此主动控制是变形与轴力的双重控制。结合现代控制论和结构的影响性原理,基坑主动控制的思路如图1所示。
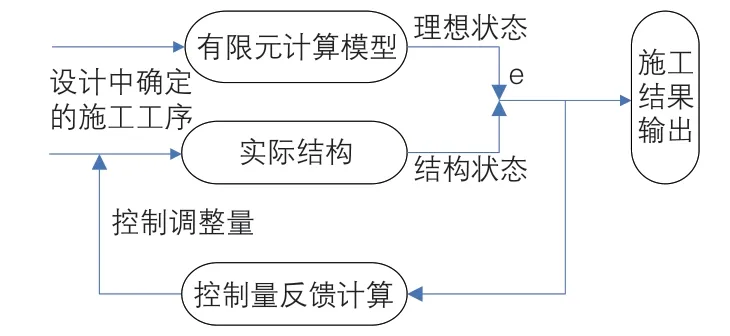
图1 结构控制流程
1.3 钢支撑伺服系统的轴力主动控制方法
考虑到基坑的复杂性,根据钢支撑轴力间的相互影响(相干性)和软土地铁基坑的施工力学模型可以得知,轴力的控制目标应该能根据实测结果进行动态调整,根据工况的不同,设定相应的控制目标,即轴力的动态多目标控制法。
在每层土方的开挖支撑过程中,如果变形能够满足分级控制指标,那么就以初始轴力值作为该道支撑伺服系统的轴力控制目标值;否则不断调整轴力控制的目标值,直到变形满足要求为止。
轴力目标值确定后,在该层土方开挖过程中伺服系统启动补偿功能,克服由于水平相干性、支撑的非弹性变形与降温等引起的轴力损失。上层土方挖完、下层土方开挖前,关闭上层对应的钢支撑轴力补偿功能,根据该层的变形控制目标实时调整该道支撑轴力的目标控制值直至满足要求,考虑到竖向相干性,上层支撑以变化后的轴力值作为控制目标,重新启动补偿功能。
在动态多目标控制法中,每道支撑的轴力控制目标根据变形控制结果后确定,并根据下道支撑的相干性结果而动态调整,这样既可以提高变形控制效果,又可以避免支撑轴力设置过大造成的基坑负向变形偏大。
2 软土地铁深基坑主动控制法的应用
2.1 工程概况
上海市浦东南路站地处陆家嘴核心区域,基坑沿浦东大道东西向敷设,骑跨即墨路,如图2(a)所示。拟建车站地层分布如下:①1杂填土、②1粉质黏土、③淤泥质粉质黏土、③夹砂质粉土、④淤泥质黏土、⑤1粉质黏土、⑥粉质黏土、⑦1-2砂质粉土、⑦2粉砂。车站主体基坑坑底位于⑤1层粉质黏土中,围护墙墙趾底位于第⑦2层粉砂中。
基坑围护形式为厚1.0 m、深46 m的地下连续墙,标准段设6道支撑,第1、4道支撑均为混凝土支撑(1 000 mm× 800 mm、1 500 mm×1 200 mm),倒数第2道支撑为800 mm×20 mm钢管撑,其余为φ609 mm× 16 mm钢管撑,如图2(b)所示。
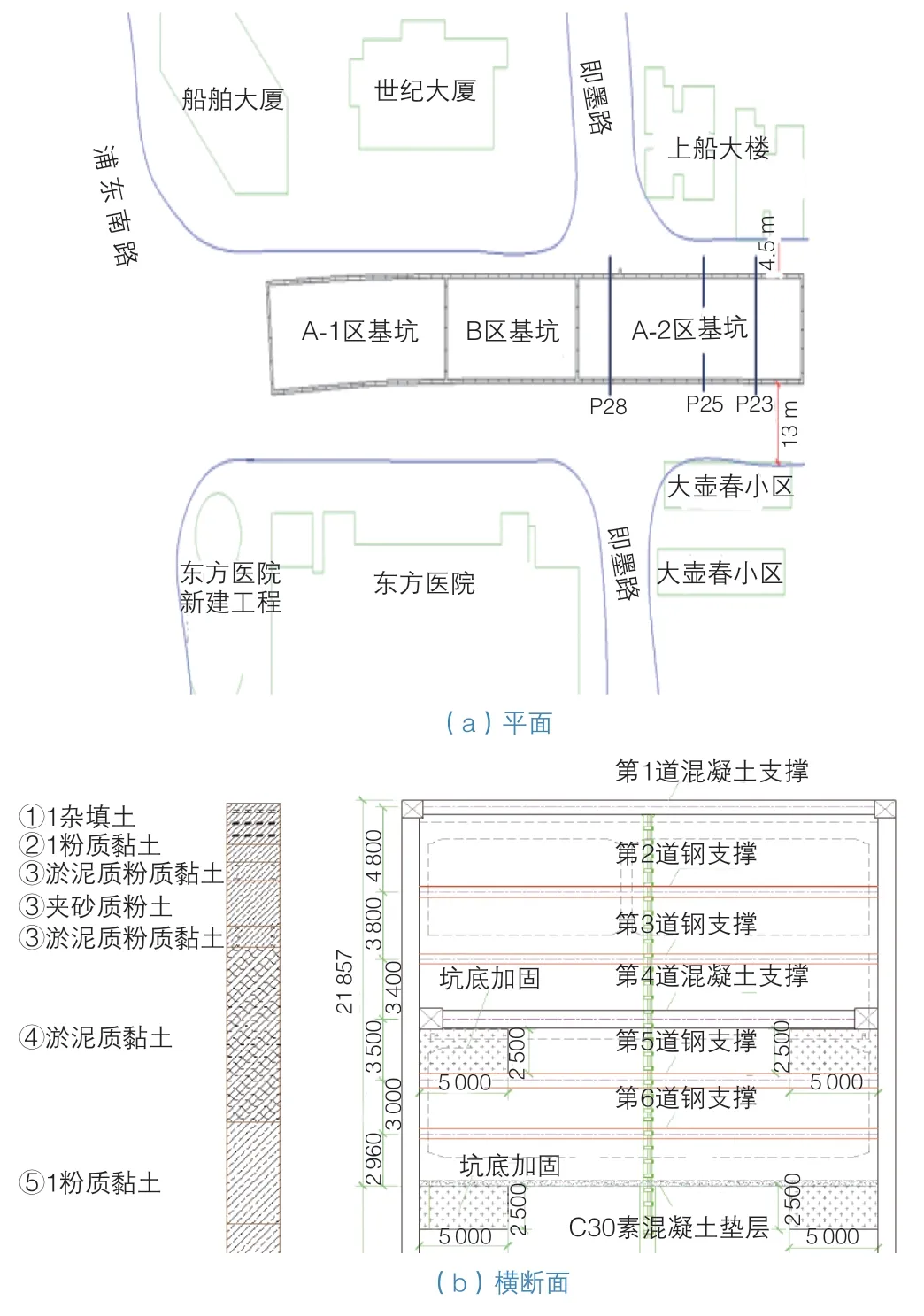
图2 浦东南路站地铁基坑示意
车站主体基坑先施工B坑,然后施工A-1坑,最后施工A-2坑。考虑到A-2坑环境极其复杂,在第2、3、5、6道钢支撑中设置了轴力自动补偿系统(图3),对围护结构的变形进行主动控制。

图3 轴力伺服系统示意
2.2 主动控制实施内容
根据基坑周边环境的不同取3个横断面为代表,即测斜点P23(邻近东端头井)、P25(基坑长边中间)、P28(西侧盖挖区域)所在的断面〔见图2(a)〕,依据上述深基坑围护结构侧向变形主动控制的流程与内容,对浦东南路站A-2基坑开挖支撑过程进行了主动控制。
2.2.1 本构模型的选取
基坑开挖是典型的卸载问题,且开挖会引起应力状态和应力路径的改变,分析中所选择的本构模型最好应能同时反映土体在小应变时的非线性行为和土的塑性性质。为此,选择HS模型进行计算分析,针对最不利开挖环境建立基本计算模型,如图4所示。
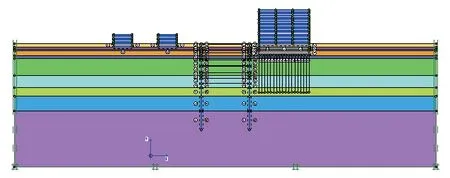
图4 浦东南路站A-2坑计算模型
在参数确定上,对于已经开挖完成的浦东南路站A-1坑和B坑,用有限元模型计算其基坑变形情况,得出的结果与基坑实际变形状态基本吻合,从而可认为采用的相关结构参数与土层参数是有效可行的。
2.2.2 基坑开挖支撑过程中轴力与变形的目标状态
对于A-2坑,根据《上海地铁基坑工程施工规程》(SZ-08—2000),其环境保护等级为一级,基坑侧向变形控制指标为0.14%H(H为基坑挖深)。考虑到该基坑开挖前周边建筑物的状态较差,对环境保护要求提出了更高的标准。
为此,综合各方因素将A-2坑的围护结构侧向变形控制的最终指标定为0.08%H。各道钢支撑处及坑底的变形分级控制指标如下:2#支撑处4 mm、3#支撑处7.2 mm、5#支撑处12.8 mm、6#支撑处15.2 mm、坑底18.1 mm。
根据支撑的规格、系梁的设置情况,综合考虑温度、支撑的拼装质量等情况,最终确定的各类支撑轴力的限值如表1所示。
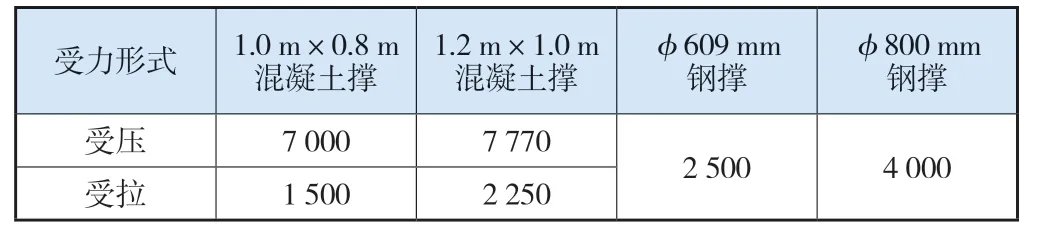
表1 各道支撑轴力限值单位:kN
2.2.3 钢支撑初始轴力计算
根据各断面处的周边环境以及0.08%H侧向变形控制指标,采用“双控法”并根据拟定的施工方案对基坑的施工过程进行分析,获得各断面满足变形控制要求的支撑计算轴力(表2),作为支撑实际施加轴力的初始值。
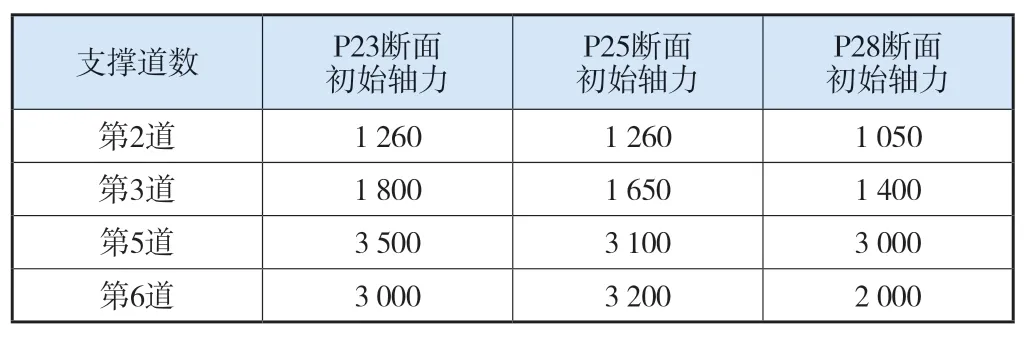
表2 A-2坑各断面支撑架设初始轴力 单位:kN
2.2.4 基于轴力相干性的伺服系统补偿功能设置
根据动态多目标控制法,每道支撑的轴力控制目标根据变形控制结果后确定,并根据下道支撑的相干性结果而予以动态调整,这样既可以提高变形控制效果,又可以避免支撑轴力过大而造成基坑负向变形偏大。为此,计算了下方土体开挖及新支撑的架设对上方既有支撑轴力的影响,详见表3所示。

表3 开挖过程中钢支撑轴力的变化情况单位:kN
由表3可知,第3层土方开挖后,第2道钢支撑的轴力变化幅度为23%,第3道支撑架设后轴力变化幅度为21%,但与初始轴力相比,变化幅度仅为3%。此后直至开挖到底,各道支撑的最终轴力与初始轴力相比变化幅度为4%。
这说明本工程中施加的钢支撑轴力能有效平衡土方开挖引起的上道支撑的轴力增加值,即支撑架设后下层土方的开挖会引起支撑轴力变大,理论上应开启轴力补偿功能增加轴力。
但随着下道支撑的架设以及支撑轴力的施加,上道支撑的轴力值又会降低,理论上应开启轴力补偿功能减小轴力。然而,下层土方开挖与支撑架设对上道支撑轴力的最终影响很小,轴力补偿功能又无需开启。
考虑到施工的复杂性,实际施工中一般将伺服系统轴力自动补偿的调节范围设置为预定值的±5%。即当轴力波动在±5%范围内时,伺服系统不会进行自动补偿,而本工程中工况变化引起的轴力变化在5%以内,无需频繁开启补偿功能进行轴力补偿。
同时,根据水平相干性,轴力变化会导致其他支撑轴力的损失,使支撑轴力不满足平面应变假定。因此,在同层土方开挖支撑过程中,为确保该层土方全部挖出后的支撑轴力与计算轴力一致,使基坑最终的力学状态与平面应变状态一致,轴力补偿开关需开启。
2.2.5 基于动态多目标控制法的主动控制过程
由于基坑工程的复杂性,支撑的理论轴力与围护的实际侧向变形往往不一致。根据轴力-变形影响性与轴力-流变影响性,通过调整支撑轴力可以改变围护结构的侧向变形、约束土体流变的发展,因此在开挖支撑过程中,如果变形能够满足分级控制指标,那么就以初始轴力值作为该道支撑伺服系统的轴力控制目标值;否则不断调整轴力控制的目标值,直到变形满足要求为止。
取测斜点P25所在的横断面为代表,阐述基坑开挖过程中的施工控制过程。绘制P25断面处各道支撑深度处的轴力-变形时间历程曲线,如图5所示(图中标星处表示各道支撑架设的时间点)。随着开挖进行与邻近支撑的架设,按分项指标对各道钢支撑的轴力进行实时调控。
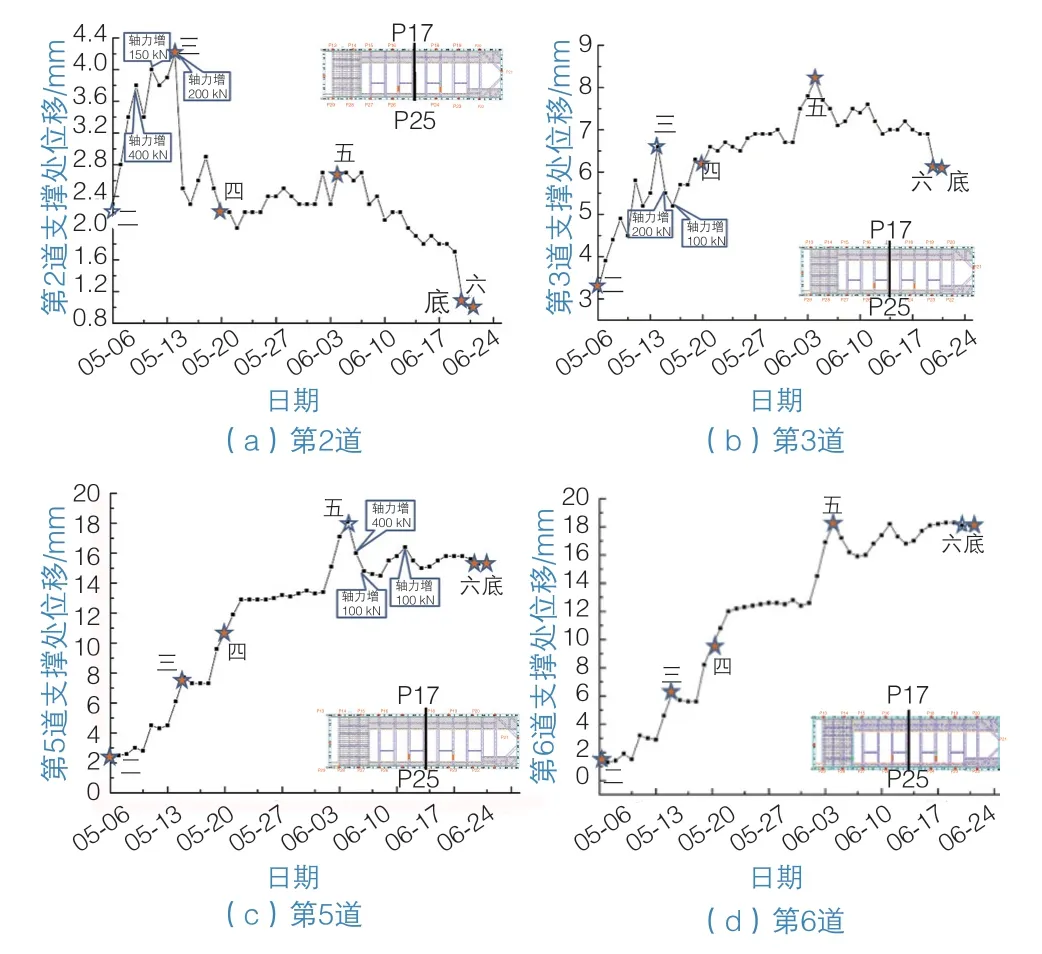
图5 各道支撑处轴力-变形时间历程曲线
2.2.6 主动控制结果
A-2基坑3个测点断面侧向变形的主动控制结果如图6所示,轴力的主动控制结果如表4所示。3个测点处围护结构的侧向变形都基本能满足控制目标0.08%H,且各道支撑轴力均处于目标限值之内。
从上述控制过程可以得到以下结论:
1)支撑主动增加轴力,使该处围护位移得到抑制甚至反向变化,表明轴力与变形间存在着对应关系,轴力-变形影响性是可行的。
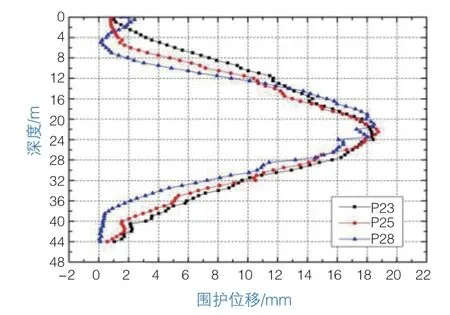
图6 各断面围护侧向变形曲线
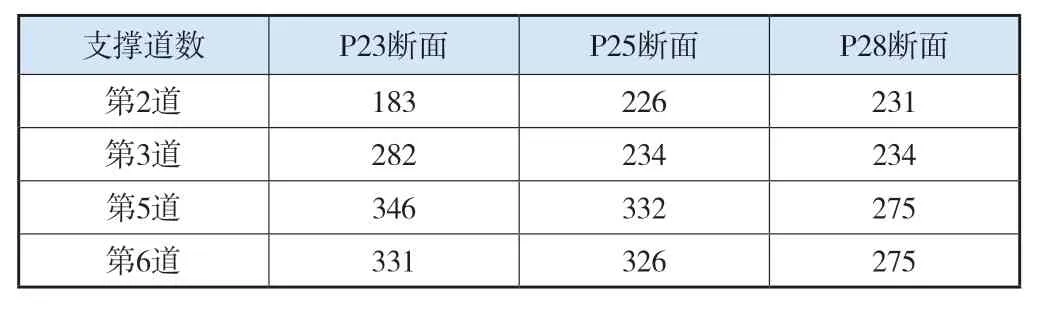
表4 浦东南路站A-2坑钢支撑最终轴力单位:kN
2)在软土基坑中当无支撑暴露时间较长时,流变会引起较明显的围护变形。后期通过及时施加主动轴力,土体流变得到了有效控制,流变增量趋于收敛,这说明流变影响性是可行的。
3)浅层围护在轴力施加后发生明显的负向变形,深层围护在轴力施加后的变形较小,说明土体越深控制效果越差,这就要求变形控制越早越好。
4)最后一道支撑设计原为φ 609 mm规格,改用φ 800 mm规格钢支撑后,支撑轴力限值大幅提高,3 200 kN(φ609 mm钢支撑的极限轴力为2 500 kN)的支撑轴力有效地控制了坑底下方的围护变形,表明深部土体中基坑侧向变形的控制与支撑的刚度密切相关,应尽量采用刚度较大的支撑为变形控制提供余地。
5)由于围护结构具有一定的抗弯刚度,因此围护结构的变形具有连续性和继承性,即浅层土体开挖卸荷必然引起深层围护结构的侧向变形,这就要求变形必须进行分层控制,即把每层土方施工引起的变形控制在目标范围内,从而实现整个基坑的变形控制目标。
2.3 深基坑围护侧向变形控制理念的全面实践
由于影响基坑围护侧向变形的因素很多,单纯的伺服控制并不能完全解决基坑围护侧向变形控制问题,上述主动控制结果是在全面的深基坑围护侧向变形控制理念指导下获得的。
1)根据周边环境和支撑力学特点,科学审慎地确定了0.08%H的围护侧向变形控制目标以及不同规格的轴力限值,实践证明该限值是合理的。一方面,支撑现场拼装质量的离散性表明过大的轴力值极易引起支撑失稳,特别是温度荷载会引起浅层支撑轴力的剧烈增加,支撑轴力设定应当留有一定的余量;另一方面,0.08%H变形指标足以确保周边环境的安全要求,现场监测数据表明周边建筑物处于安全状态,避免了过高的保护要求可能带来的支撑失稳风险。
2)轴力的竖向相干性表明,支撑轴力的影响范围一般不超过3道支撑,距离越远影响越小。本工程竖向设置了6道支撑,除第1道混凝土支撑外,间隔2道钢支撑在第4道设置混凝土支撑,形成“隔二设一”模式。一方面,计算表明第4道支撑轴力最大,较之“隔三设一”模式可以提高基坑的安全性;另一方面,较之“隔一设一”模式,“隔二设一”模式避免了过多混凝土支撑限制围护变形调整的情形,实现了钢支撑与混凝土支撑的统筹协调设置。
3)B坑、A-1坑的监测数据表明,软土流变引起的围护侧向变形占据了总变形的70%左右,这就要求充分利用“时空效应”尽量减少流变变形。为此,在A-2坑的围护侧向变形控制中,首先把“时空效应”作为基坑变形控制的核心和主要控制手段,尽量减少无支撑暴露时间下的流变变形。整个控制过程表明,支撑轴力对于浅层围护侧向变形控制效果明显,但对深层土体处的围护侧向变形控制效果显著降低,单纯依靠轴力来减少已经发生的变形不可取,轴力主要用于控制土体流变产生的变形,伺服系统是辅助手段,二者主次不可颠倒。
因此,环境保护与基坑安全并重、钢混支撑设计协调、“时空效应”与伺服应用主辅分明的深基坑围护侧向变形控制理念,是深基坑变形主动控制方法的实施基础,抛开这一点无法充分发挥主动控制的效果。
3 结语
伺服系统能够实现支撑轴力的实时、主动调整,为建立全新的主动控制方法奠定了硬件基础;而基于结构影响性原理所提出的主动控制方法则奠定了主动控制的理论基础。通过对主动控制方法的理论研究和实践应用,得到以下结论:
1)自动伺服系统既为基坑的变形控制提供了可靠的手段,同时又对传统的基坑变形控制理念带来了挑战。所提出的围护变形与支撑轴力双控、钢混支撑设计协调、环境保护与基坑安全并重、“时空效应”与伺服应用主辅分明的深基坑变形控制理念,为深基坑变形的系统控制提供了重要指导。
2)基于结构影响性原理所提出的基坑主动控制思路是通过轴力的主动改变来实现围护结构力学参数的调整,其中轴力-变形影响性、轴力相干性、轴力-流变影响性是结构影响性原理在基坑主动控制中的三大应用。
3)考虑到基坑工程的复杂性,静态单一目标法难以满足基坑的主动控制需要,所提出的动态多目标控制法较好地克服了上述困难,既可以提高变形控制效果,又可以避免支撑轴力设置过大而造成基坑负向变形偏大。
