中低速磁悬浮列车救援设备起重特性研究*
2020-04-09
西南交通大学机械工程学院 成都 610031
0 引言
中低速磁悬浮列车以其环保、安全性高、爬坡能力强、建设和维护成本低等优点逐渐成为未来城市轨道交通的重要方式。为了完善中低速磁浮交通的系统性,需要配备用于车辆吊装复位、事故救援的救援设备。
目前,对中低速磁悬浮交通工程车的研究主要在磁浮维护牵引车领域。磁浮维护牵引车具有调车、设施设备检测和维修等重要作用。邓赞[1]针对长沙磁浮线的线路特点设计了一种磁浮维护牵引车转向架,并对其进行了静力学分析和疲劳寿命分析。杨颖[2]等人对中低速磁浮维护牵引车构架进行了静强度分析和疲劳强度分析,验证了构架设计的合理性,并对构架进行了优化减重。当磁悬浮车辆发生重大事故,无法由牵引车送往维修站点时,需要具有起吊能力的救援设备将磁浮车辆调离轨道以保证线路的通畅。传统铁路系统领域内,国内外学者对铁路起重机进行了大量的研究。许善超[3]等人介绍了160 t伸缩式铁路起重机转向架的主要性能参数和结构,并对转向架进行了静强度实验和动力学性能实验,实验结果表明相关设计参数均满足要求。Yang Di[4]等人完成了160 t双回转铁路起重机的旋转平台和柔性配重的参数化建模和结构分析,并通过有限元分析软件对旋转平台各部件的厚度进行了优化。
目前,对应用于中低速磁悬浮交通的起吊型救援设备的研究还很少。结合中低速磁悬浮轨道特点,确定了救援设备转向架的结构形式,并在轨道强度限制条件下得出了救援设备的起重特性,为后续中低速磁悬浮交通救援设备的设计提供了一定的借鉴作用。
1 转向架结构方案及支承力计算
1.1 转向架形式方案
中低速磁悬浮的线路架设于混凝土桥墩之上,线路距离地面位置较高,且桥面宽度较窄。因此,要求救援设备需在磁浮轨道上实施救援,且无法采用支腿作业。
为了确保救援设备具有足够的抗倾翻稳定性,设计了一种救援设备的转向架结构方案。救援设备采用具有救援能力大、救援功能不受线路影响等特点的轮轨接触式走行方案[5]。为保证救援设备具有足够的抗倾覆稳定性和过弯能力,转向架上设置有安全轮和导向轮。转向架结构简图如图1所示。
1.2 考虑伸缩配重下的支承反力计算
为了提高救援设备的抗倾覆稳定性,同时节省空间,救援设备采用了伸缩式配重形式[6]。伸缩配重可改善行走轮和安全轮的轮压分配,进而改善F型导轨的受力情况,提高救援设备的起重能力。
救援设备支承装置所受的垂直反作用力称为支承反力。计算支承反力后可进一步计算行走轮和安全轮的轮压,根据轮压值可验算中低速磁悬浮轨道的承载能力。根据救援设备使用要求,底盘采用两个转向架,每个转向架上有两对轮对。故救援设备的支承装置为四点支承式。四支点式支承反力的计算属于一次超静定问题,精确求解十分困难,可将车架假设为绝对刚体,利用力矩法近似求解[7]。
在图2中,假设救援设备由A、B、C、D四点支承。下车重力为G1,重心在支承面上的投影与支承平面的形心重合于O1。吊重为Gh,作用点在支承面的投影为点J。吊臂重力为Gb,重心在支承面上的投影为点E,到O1的距离为e。伸缩配重的重力为Gp,在支承面的投影为点F,旋转中心为O1,臂架平面与x轴的夹角为φ,l为轮距,b为轮距。
将Gh、Gb和Gp的作用点移到对称中心O1处,同时需附加相应的力矩M,M可进一步分解为Mx和My,即
式中:θ为吊臂与水平面的夹角,L为吊臂的长度。
将吊臂的重心简化在吊臂中心位置,则e可按下式计算
总垂直载荷为
各个支承点的力为
1.3 轨道强度限制
F型轨道是救援设备自重及其他外载荷的直接受力构件。为了防止救援设备超载,对F型轨道造成破坏,需要求出F型轨道所能承受的最大轮压。在相邻轨枕的F型轨道中间部位施加单个集中力,在保证F型轨道强度的前提下,逐步试算最大集中力。
图3是集中力为7.84×104N时轨排的应力等直线图。轨排最大应力为295.62 MPa,最大应力位于轨枕与F型钢轨接触区域的边界处。轨排结构只在极小范围的高应力区产生一定的塑性变形,其他区域的应力值均在180 MPa以下。所以,救援设备单个轮压的极限值为7.84×104N。由于单个支承点处的支承力由转向架同侧的两个行走轮或安全轮平均承担,故单个支承点的支承力的极限值为(-1.57~1.57)×105N。
2 起重特性研究
2.1 救援设备结构参数取值
救援设备的起重特性是指导救援设备安全作业和事故分析的重要依据[8]。本文从满足轨道强度的角度研究救援设备的起重特性,具体参数取值见表1。
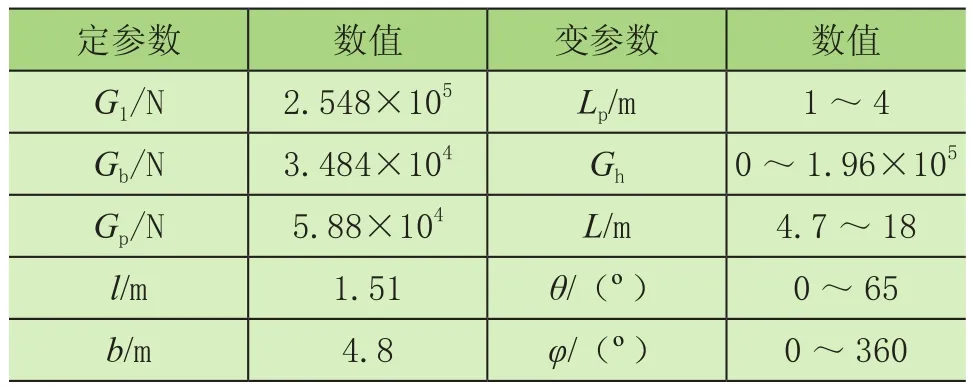
表1 救援设备结构参数
2.2 铭牌起重能力
360°回转下的最大起重能力是救援设备最基本的起重性能,一般也是铭牌上标注的起重性能[9]。参照相关磁浮工程车结构参数并结合中低速磁悬浮轨道尺寸,取Lp为4 m,L与cosθ的乘积定义为幅度R(2 m≤R≤18 m),求解在吊臂360°全回转的过程中,满足4个支承点处支承力大小均在限定范围内的最大起重力矩。
图4为吊臂360°全回转在4个支承点处支承力满足限定范围条件下幅度与该幅度下最大起重量的关系图。从图中可以看出,当幅度为2 m时,最大起重量为15.06 t。随着幅度的增大,该幅度下最大起重量逐渐减小。当幅度达到最大值18 m时,最大起重量为0.67 t。
将幅度与该幅度下的最大起重量相乘,即可得到全回转条件下的最大起重力矩。如图5所示,当幅度为3.6 m时,最大起重力矩为31.8 t · m。
2.3 顺轨起重性能
图6为救援设备顺轨方向±30°范围内的起重性能曲线。从图中可以看出,幅度为2 m时的起重量为16.2 t。随着幅度的增大,该幅度下的最大起重量逐渐减小。当幅度为18 m时,最大起重量为1 t。
2.4 支承力与变参数关系研究
支承点的受力受到L、θ、φ、Gh、Lp的共同影响。由于影响因素较多,不便于直接研究支承力与变参数之间的关系。现将θ定为65°,φ定为90°,Lp定为4 m,以便研究支承力与L和Gh的关系。
根据支承面的对称性,画出了支承点A和D的受力情况。从图7a可以看出,支承点A处的受力整体上随L和Gh的增加而变大,图形上部是缺失的,说明缺失部位对应的Gh和L的组合导致支承点A处受力超过了限定范围。当L小于4.9 m时,Gh可达到最大值1.96×105N。图7b图形没有缺失,在Gh接近1.96×105N且L接近18 m时,支承点处的受力大小为负值,并接近极限值,说明此时D处的行走轮已与F型轨道分离,安全轮与F型轨道接触并且安全轮对F型轨道的压力即将使F型轨道发生破坏。
将θ定为65°,φ定为0°,L定为14 m,以便研究支承力与Gh和Lp的关系。根据支承面的对称性,只画出了支承点A和B的受力情况。在图8a中,图形下部有缺失,说明Gh大于1.75×105N时无法选取适当的Lp使A点的支承力满足限定条件。在图8b中,图形上部有缺失。当Gh大于5.14×104 N时,无法选取适当的Lp使B点的支承力满足限定条件。综合考虑支承点A和B的受力情况,在θ为65°、φ为0°、L为14 m的工况下,Gh应小于5.14×104N。
将θ定为45°,Lp定为4 m,L定为12 m,以便研究支承力与Gh和φ的关系。从图9a整体看,图形下部和上部均有缺失。沿平行于偏摆角坐标轴方向,当Gh小于3.15×104N时,图像完整,说明当Gh小于3.15×104N时吊臂进行360°全回转,支承点A处的支承力大小都满足限定条件。当Gh大于3.15×104N时,在部分偏摆角下,A处支承力的大小不满足限定条件。沿平行于吊重坐标轴方向,当φ处于42°~75°和252°~285°时,图像是完整的,说明只在这两个角度范围内Gh才可取到最大值。图9b~图9d的图形只是图9a关于沿偏摆角滞后或超前一定的角度形成的,不再叙述。
将φ定为90°,Lp定为4 m,L定为16 m,以便研究支承力与Gh和θ的关系。根据支承面的对称关系,只画出支承点A和D的受力情况。在图10a中,图形上部缺失。随着吊臂仰角的增大,该仰角下的最大起重量也在增大。当吊臂仰角为65°时,Gh最大可取8.6×104N。当吊臂仰角为0°时,Gh最大可取3.4×104N。在图10b中,图形下部有缺失。当吊臂仰角大于27°时,Gh最大可取1.96×105N。当吊臂仰角为0°时,Gh最大可取1.69×105N。综合考虑支承点A和D的受力,当φ为90°、Lp为4 m、L为16 m时,某个臂架仰角下的最大起重量主要受到支承点A处的轨道强度限制。
2.5 铭牌起重性能有限元验算
在幅度为3.6 m、起重量为8.8 t的工况下,验算磁悬浮轨排结构在臂架360°回转过程中的结构强度。采用Solid 186实体单元对车轨耦合有限元模型进行自由网格划分,并对车轮与F型轨道接触区域进行网格细化,网格划分结果如图11所示。为了模拟刚性车架,将车架材料的弹性模量取2.1×1014Pa。在车架回转支承圈上表面施加总集中载荷和附加扭矩,F型轨道有限元计算结果如图12所示。在各偏摆角下F型轨道的最大应力均小于许用应力,且在偏摆角为270°时,F型轨道的最大应力最小,与实际经验相符。
3 总结
本文结合中低速磁悬浮的轨道特点,设计了一种应用于中低速磁悬浮列车救援的、具有较好抗倾覆能力的救援设备的转向架方案。求解了轨道支承力的数学模型,根据轨道强度限制,计算了救援设备单个支承点处的支承力的取值范围。绘制了救援设备的铭牌起重特性曲线和顺轨方向起重性能曲线,研究了支承力和吊重分别与吊臂长度、配重伸出长度、偏摆角以及吊臂仰角的关系。最后验证了救援设备铭牌起重性能下F型轨道的强度。为中低速磁悬浮交通相关工程设备的设计提供了一定的参考价值。
