多特征融合的运动想象脑电特征提取方法
2020-04-09刘鹏飞朱思蒙
罗 飞,刘鹏飞,罗 元,朱思蒙
(重庆邮电大学光电工程学院,重庆400065)
0 引言
脑-机接口(Brain-Computer Interface,BCI)系统通过分析输入的电生理信号,将用户的意图解码成控制指令来操作输出设备[1]。根据信号形式的不同,脑电信号主要分 为 脑 电 图(ElectroEncephalonGraph,EEG)、脑 磁 图(MagnetoEncephaloGram,MEG)、功能磁共振成像(Functional Magnetic Resonance Imaging,FMRI)等[2]。其中,EEG 由于其非侵入性和低成本的特点而广泛应用于BCI系统[3]。
运动想象(Motor Imagery,MI)的原理是想象运动时会对大脑两侧的EEG 信号产生事件相关去同步/同步现象[4],已成为EEG 信号领域的研究热点。其中,EEG 信号因其微弱且具有非线性、非平稳及时变敏感等特点,时-频域分析和空间滤波被广泛应用于其特征提取过程[5]。时-频域分析主要有短时傅里叶变换(Short-term Fourier Transform,STFT)[6]、小波变换(Wavelet Transform,WT)[7]和小波包变换(Wavelet Package Transform,WPT)[8],空间滤波主要为共同空间模式(Common Spatial Pattern,CSP)算法[9]。
然而,基于STFT、WT、WPT的时-频域分析方法无法同时在时域和频域范围内取得较高的分辨率。希尔伯特-黄变换(Hilbert-Huang Transform,HHT)是一种适用于非线性非稳定信号的时-频域特征提取方法,该方法通过经验模态分解(Empirical Mode Decomposition,EMD)将信号自适应地分解成多个具有物理意义的固有模态函数(Intrinsic Mode Function,IMF),通过对各阶IMF 作Hilbert 变换,可以获得具有很高分辨率的时-频域特征[10]。但随着大脑状态变化,脑电信号的时-频域特征会出现波动。因此,近年来相关研究者综合考虑多种特征方法进行特征提取。Chen 等[11]融合香农熵、小波熵和样本熵进行特征提取;杨默涵等[12]基于总体经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)和近似熵提出一种多特征提取方法。以上方法都表现出很好的自适应性和较高的识别准确率,但考虑的都是单个角度特征的融合,不能从多个角度获取信号的更完整描述。因此,本文考虑一种综合时-频-空域特征的方法。
考虑到EMD可以将单个通道扩展成多个具有物理意义的窄带信号IMF,本文在HHT 的基础上提出一种提取时-频-空域特征的方法HCHT(Hilbert-CSP-Huang Transform)。将EMD得到的各阶IMF进行Hilbert变换,获得具有很高分辨率的时-频域特征,并对各阶IMF 作进一步的CSP 分解,即将各阶IMF分量合并成新的信号矩阵,通过构造的IMF信号矩阵在不同类状态下的幅值差异构造空间滤波器,获取各阶IMF的空间分布特征,从而将HHT 提取的时-频域特征扩展为时-频-空域特征。该方法实现了对脑电信号的多角度描述,且信号特征都是基于HHT算法,互为补充。在数据集上的实验结果表明,本文方法平均识别准确率更高,且标准差更小,鲁棒性更好。最后在智能轮椅平台上对该方法的有效性进行了进一步的验证。
1 实验数据
本文采用的数据集为BCI Competition II 的Data set III 数据集合[13]。实验样本记录来自一名25 岁的健康女性。EEG信号从国际10-20 导联系统的C3、C4 和Cz 通道获得,采样频率为128 Hz,滤波范围为0.5~30 Hz。单次信号采集过程如图1所示。
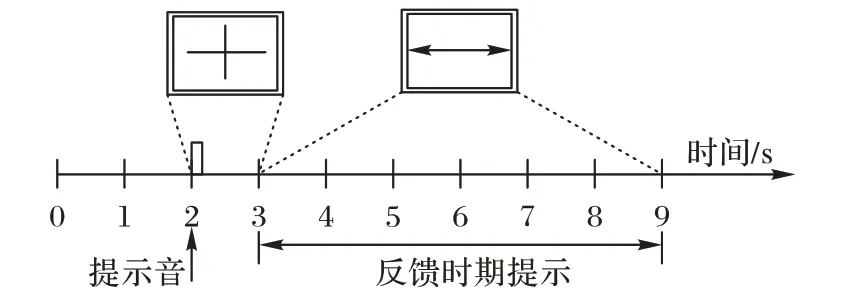
图1 单次信号采集过程Fig.1 Single signal acquisition process
整个实验分为7 组,每组包括40 个实验。单次实验持续9 s,实验要求受试者安静坐在显示器前,根据屏幕提示进行左手或右手运动想象(MI)任务。每次实验前2 s屏幕显示空白,提醒受试者放松;t=2 s 时,显示器屏幕显示“+”字形,受试者准备MI;t=3 s时,显示器中央随机显示向左或向右的箭头,受试者根据箭头方向想象左手或右手运动,持续6 s;t=9 s时,单次采集结束,受试者短暂休息,准备下一次实验。
2 基于HCHT的特征提取方法
基于HCHT 的特征提取方法如图2 所示,具体过程分为四步:1)将预处理后的MI 脑电信号经过EMD 得到多个IMF;2)提取各阶IMF 的Hilbert 瞬时能量谱(Instanta-neous Energy Spectrum,IES)和边际能量谱(Marginal Energy Spectrum,MES)分别作为脑电信号的时域特征和频域特征;3)将各阶IMF分量合并成新的信号矩阵,对各阶IMF进行进一步的CSP分解,获得表征空间信息的特征向量;4)归一化第2)步和第3)步提取到的信息,得到表征MI脑电信号的特征向量。
2.1 经验模态分解
经验模态分解其本质是通过信号的特征时间尺度判别内蕴振荡模式,将信号自适应地分解成多个具有物理意义的固有模态函数IMF[14]。
预处理后的输入信号经过EMD得到如下表达式:

其中:X(t)为输入信号,Ci(t)第i 次筛选得到的IMF 分量,N 为筛选次数,Rn(t)为最终的剩余分量。
对单次MI 脑电信号进行经验模态分解,分解结果如图3所示。
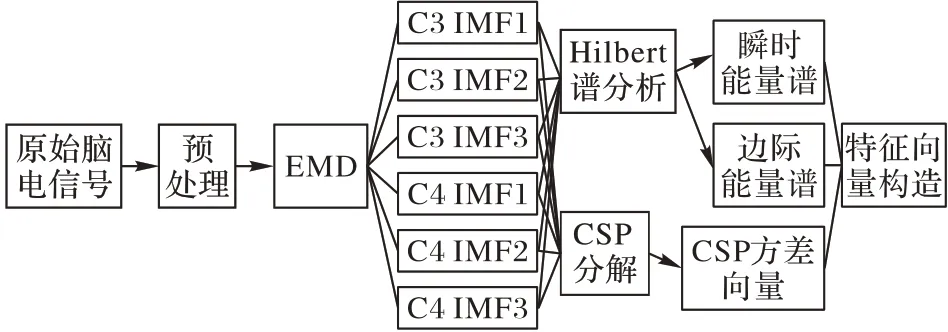
图2 HCHT特征提取过程Fig.2 Feature extraction process of HCHT
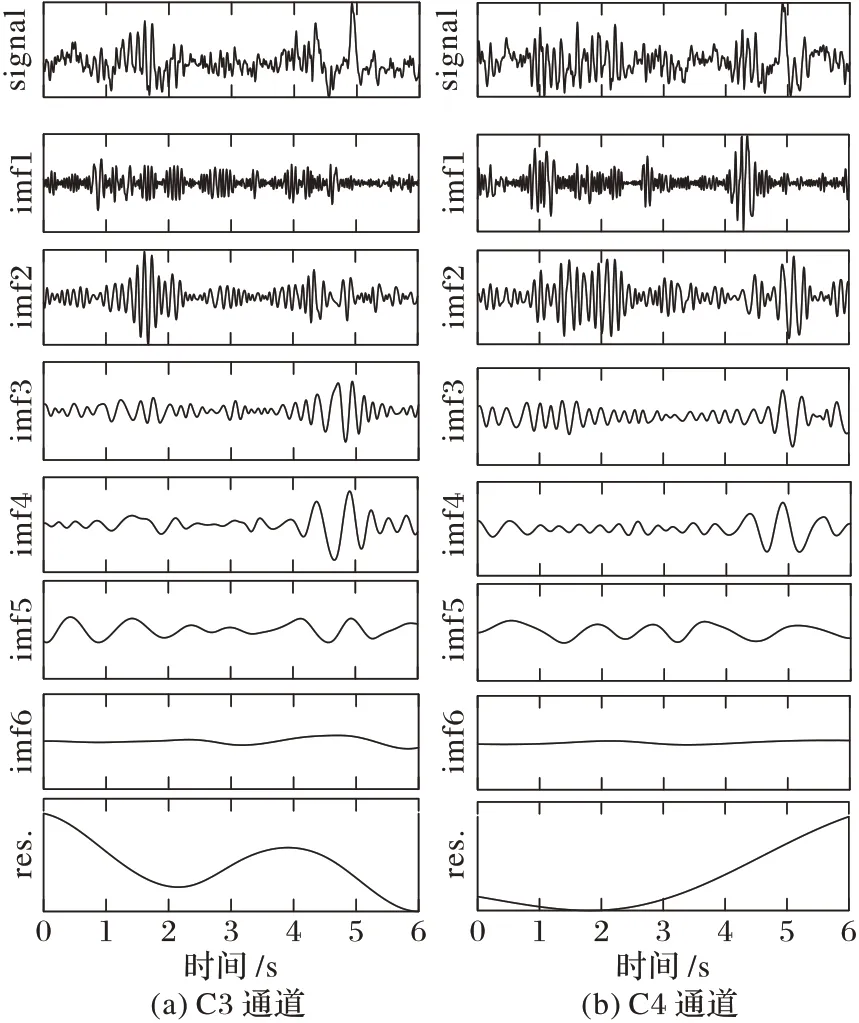
图3 MI脑电信号EMD结果Fig.3 EMD results of EEG indued by MI
分解后的各阶IMF 都是蕴含有MI脑电信息的窄带信号,每一个IMF分量都可以看作单个信号通道。本文对C3、C4通道的各阶IMF 分量进行采样(采样频率为原始脑电信号的采样频率),并将两个通道的信号分量合并,构造成一个N×T信号矩阵,其中N为IMF分量个数,T为信号分量的采样点数,信号矩阵表示为:

其中:n为IMF个数,j=L或R。
2.2 Hilbert谱分析
MI 脑电信号的特征信息主要集中在前三阶IMF,因此本文主要对前三阶IMF 进行研究。对每个IMF 分量进行Hilbert变换:

则可求得解析信号:

其中:Ai(t)为瞬时幅值,φi(t)为瞬时相位。
由Ai(t)和φi(t)可进一步求取瞬时频率ωi(t),即:

则可描述信号幅度在时-频域的分布情况,即Hilbert谱:

其中,Re为取实部。
根据式(6)可进一步求取IES和MES:
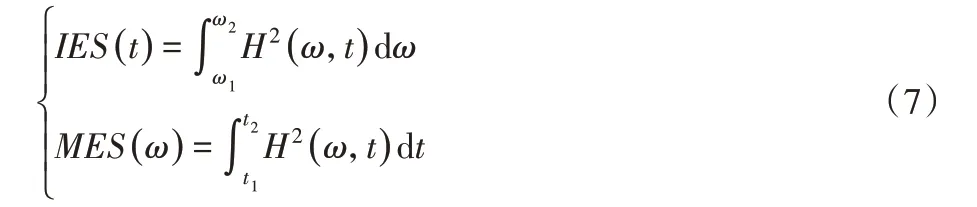
式中:[ω1,ω2]为信号的频率范围,[t1,t2]为信号的时间范围。
IES 和MES 分别反映了信号在时域和频域上的能量特征。本文分别将IES 和MES 定义为MI 脑电信号的时域特征F1∈Rm1×1和频域特征F2∈Rm2×1,其中m1和m2分别表示时间点数和频率点数。
2.3 基于CSP的IMF特征提取
共同空间模式来源于共空域子空间分解(Common Spatial Subspace Decomposition,CSSD),是一种两分类任务下的空域滤波算法,能够从多通道脑电信号数据里面提取出每一类的空间分布成分[15],主要分为两步:构造空间滤波器和特征提取。
根据2.1 节信号矩阵的构造方法,将C3、C4 通道前三阶IMF分量合并,构造左右手MI的信号矩阵XL和XR。
步骤1 构造空间滤波器。
求出左右手MI信号矩阵的均值空间协方差矩阵:

其中:Xc,i表示左右手MI 的第i 次实验,K 表示同一标签的信号矩阵的实验数量,trace()表示矩阵的迹。
求混合空间协方差矩阵R,并对其进行特征值分解:

进一步可求取白化矩阵:


对白化后的矩阵进行特征值分解:

其中:Us是SL和SR的特征向量,λL和λR分别是对应的特征值矩阵。可以证明SL和SR具有相同的特征矩阵Us,且λL与λR之和为单位矩阵。因此,当SL的特征值最大时,SR的特征值最小,可最大限度地区分两类信号。则可构造出空间滤波器:

步骤2 特征提取。
对构造的信号矩阵Xj进行进一步的共同空间模式分解,经空间滤波器W投影得到特征矩阵Z,如式(14)所示:

将特征矩阵Z 的前m 行和后m 行作为信号矩阵的特征,求取特征向量:

vj表征了两类MI 脑电信号特征,本文由式(10)将其表示为空域特征F3∈R2m×1:

2.4 运动想象脑电特征向量构造
本文的MI脑电信号由上述三种特征进行描述,将求取的IES 和MES 以及CSP 方差向量整合并构造输入特征向量F'={F1,F2,F3}。由于不同的特征具有不同的含义,因此有必要通过以下方式对输入特征向量进行归一化:

其中:μk是第k 个特征的平均值组成的向量,σk是第k 个特征的标准差。
最后,将归一化的输入特征F={F'1,F'2,F'3}通过支持向量机(Support Vector Machine,SVM)分类。SVM 的原理是使分离超平面之间的距离最大,并选择最佳超平面作为决策边界[16]。由于SVM 具有出色的分类性能,因此已广泛应用于脑电信号处理。
3 线下实验
3.1 多特征和单一特征的对比
为了验证本文方法的有效性,将数据集随机分成10 个子集,每个子集包含来自各个分类的相同比例的样本。依次选取其中1个子集用于测试,其余9个子集用于训练,重复10次,并取10次实验的平均准确率。为公平比较,使用10折交叉验证法找到每个过程中SVM的最佳惩罚系数C和核函数参数σ,并采用10次实验的平均准确率和标准差来测量性能。单次实验准确率如图4所示,平均分类准确率和标准差如表1所示。

表1 平均准确率Tab.1 Average accuracy
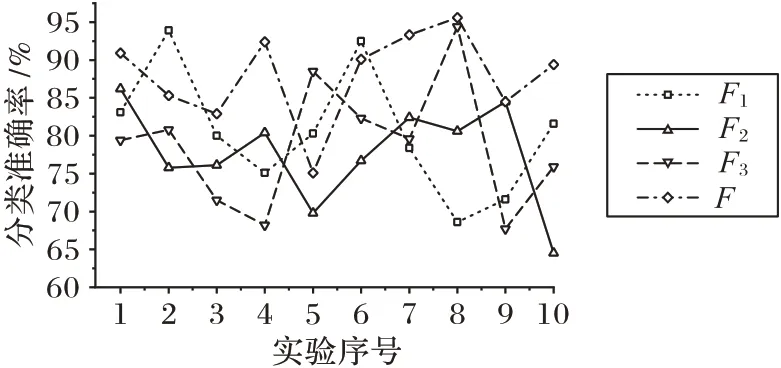
图4 单次实验准确率对比Fig.4 Comparison of single test accuracy
从表1 可以看出,当使用本文的融合特征F 时,可以获得88.0%的平均准确率,与单一的时-频域特征和空域特征相比,分别提高了7.5、10.3 和9.2 个百分点。这是因为与单一特征相比,融合的特征实现了信号不同特征之间的互补,可以获得更全面的信号表达,进而可以获得更好的识别效果。并且,本文特征提取方法的标准差均小于其他的三种方法,说明本文提出的方法具有更强的稳健性。
3.2 多种识别方法结果比较
表2 还给出了文献[11-12]两种多特征提取方法的识别结果。可以看出,当通道数相同时,本文方法的识别率分别比文献[11-12]的方法分别高2.3和4.7个百分点。这是因为本文方法综合考虑了脑电信号的时-频-空域信息进行特征提取,从而可以获得信号特征的更完整表达,有效提高了MI 任务的识别能力。从耗时来看,本文方法的平均耗时比第一名多0.5 s,整体差异不大,但识别率提高了4.7个百分点。
同时,为了体现对比方法的多样性,本文还在BCI Competition III 的Data set I数据集进行了实验。表2还给出了脑机接口竞赛“BCI Competition III Data Set I”前三名识别方法的结果(按名次由高到低分别为文献[17]、文献[18]和文献[19]的方法)。本文方法取得的识别率为87.3%,分别比第二名和第三名高0.3 和1.3 个百分点,比第一名低3.7 个百分点。然而,本文提出的特征提取方法仅提取两个通道的信号进行分析,在保证分类准确率的情况下,大大减少了通道数。从测试集的平均分类耗时对比可以看出,随着通道数的减少,计算数据量大大减少,因此,本文方法的平均耗时远少于以上三种方法,为便携式BCI 系统的在线采集和识别提供了可行性。因此,综合来看,本文方法均优于以上提及的方法。
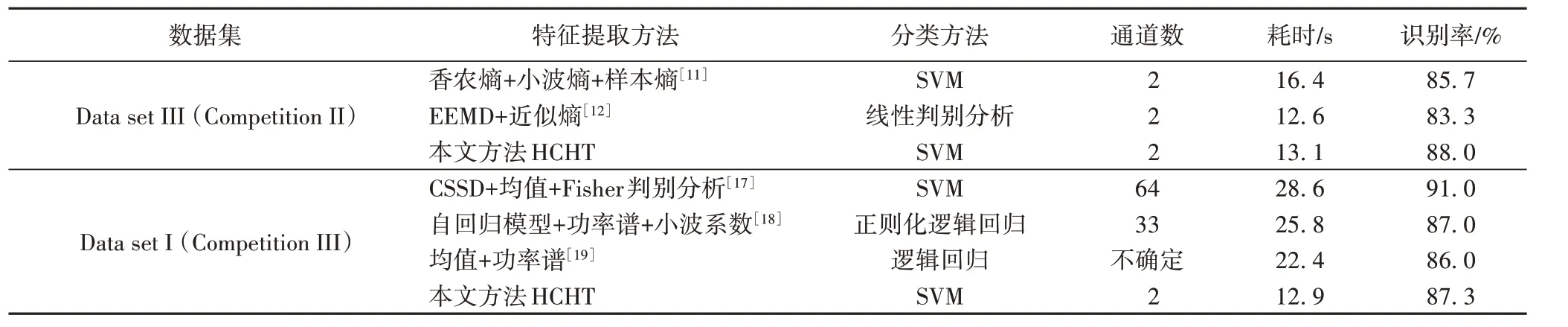
表2 多种识别方法结果比较Tab.2 Result comparison of multiple recognition methods
4 线上实验
本文在智能轮椅平台上采用基于HCHT 的人机交互系统进行了在线实验。令6 位受试者通过想象左手或右手运动来控制轮椅运动。采用Emotive传感器作为脑电信号采集设备,16 个电极的安放位置如图5 所示。将采样电极中的FC5 和FC6 电极作为输入电极,CMS 和DRL 作为参考电极。在轮椅的方向控制中,脑电信号首先经过0.1~30 Hz 的带通滤波,然后通过HCHT 算法对信号特征进行提取,对提取到的特征通过SVM算法进行分类识别,并转化为控制指令控制轮椅转向。
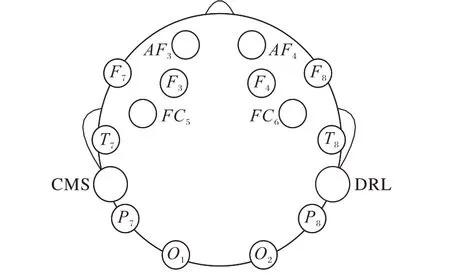
图5 电极安放位置Fig.5 Electrode placement positions
采用基于HHT、CSP 和HCHT 的人机交互系统,在智能轮椅平台上对6 位受试者进行重复测试,完成如图6 所示的“8”字形路线。实验场地两侧各设置一个障碍物,受试者端坐在轮椅上以0.15 m/s的前进速度,从起点出发,通过想象左手或右手运动来控制轮椅转向,绕过两侧的障碍物,得到如图7 所示的运动轨迹曲线。从图7(a)和(b)可以看出,基于HHT 和CSP的BCI系统与图7(c)的HCHT相比,其运动轨迹曲线较为混乱,不平滑,且波动较大。这是因为HCHT 是一种多特征融合的方法,可以获得MI 脑电信号特征的更完整表达,能够提取出更为准确的脑电信号特征,从而获得更高的分类准确率,实现对智能轮椅更精确的控制,受试者能更安全平滑地完成指定路线。除此之外,还可以看出“8”字形的右边较为混乱,这是由于受试者长时间处于MI状态会出现疲劳状态,使得信号的特征值发生变化,识别准确率出现略微下降。
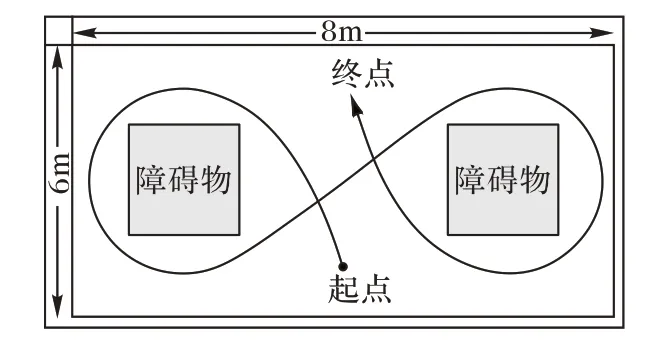
图6 实验路径Fig.6 Experimental path
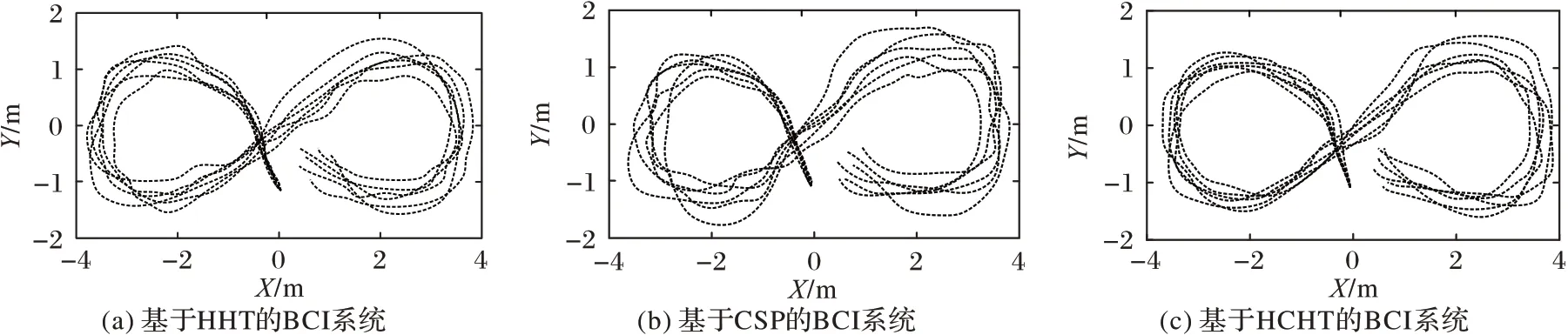
图7 基于三种方法的轮椅运动轨迹曲线Fig.7 Wheelchair trajectory curves based on three methods
图8 为6 位受试者分别在HHT、CSP 和HCHT 三种方案下控制轮椅完成“8”字形路径的耗时对比。可以看出,基于HCHT的控制方案耗时略微多于HHT和CSP,这是因为HCHT算法是一种多特征提取算法,同时提取IES、Hilbert 边际能量谱以及CSP 方差向量,从多个角度实现了对MI脑电信号特征的综合描述,因此耗时增加。三种方法的耗时主要集中在EMD 过程,提取IES、Hilbert 边际能量谱以及CSP 方差向量的耗时占比并不大。因此,从图中可以看出,虽然HCHT 耗时比HHT和CSP略多,但三者的耗时差异不大,并不影响整体系统响应,且HCHT 算法具有更高的识别率和稳定性,更适用于实际应用环境。
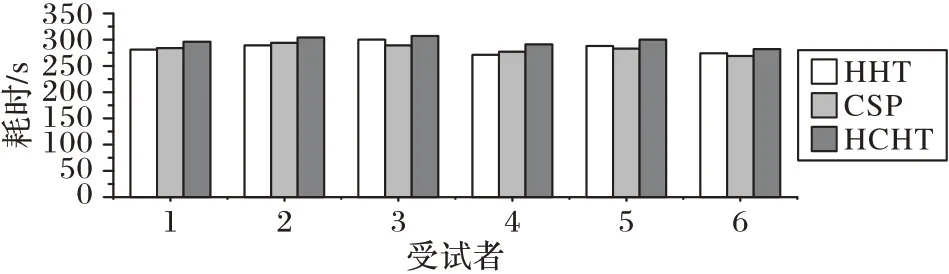
图8 采用HHT、CSP以及HCHT控制轮椅运动的耗时对比Fig.8 Time-consuming comparison of using HHT,CSP and HCHT to control wheelchair movement
5 结语
本文基于HHT 和CSP 提出的MI 脑电信号特征提取方法HCHT,综合考虑了脑电的时间-频率-空间信息进行特征提取。即首先经过EMD 得到各阶IMF,接着对各阶IMF 进行Hilbert 变换,提取IES 和MES 分别作为时域特征和频域特征,并将多个IMF 合并成新的信号矩阵,利用CSP 进行进一步的空间滤波,获取其空间特征。最后,使用特征向量来训练SVM分类器,并对MI脑电信号模式进行分类。在竞赛数据集上得到的实验结果表明,相比单一的时频特征和空间特征,本文提出的HCHT 特征提取方法平均准确率更高,标准差更小,鲁棒性更好。最后利用智能轮椅平台对算法进行验证,进一步验证了算法的有效性。本文方法实现了对两通道左右手MI 脑电信号的有效识别,为便携式BCI技术提供了一种新的思路,但识别率和识别种类有待进一步的优化。
