跨介质航行器流体动力外形仿生设计
2020-04-09吴正阳张成春贺永圣鲍杨春郑益华
吴正阳,张成春,贺永圣,鲍杨春,郑益华
(吉林大学工程仿生教育部重点实验室,长春 130022)
0 引言
跨介质航行器可从陆地、水下或舰艇发射,作战用途广、机动能力强、隐身性能好,具有重要的军事应用前景。在未来海上作战中,该航行器可快速切换海空运行模式,执行海上侦察与精确打击任务,不仅具有弱化敌方防御系统的作用,还可震慑敌方作战人员心理,有效拒止敌方蛙人等特种部队的袭扰。何肇雄等[1]认为,跨介质航行器与潜艇搭配可大幅提高潜艇的综合作战能力。此外,在大型海上灾难营救、环境污染区域信息探测、海洋地理研究等民用领域,跨介质航行器也可发挥不可替代的作用。
20世纪30年代,苏联捷尔任斯基高等海军工程学院学员乌沙科夫最早提出跨介质航行器的概念,受到苏联高层的重视,并责成苏联军事科学研究委员会论证详细方案,但因种种原因未付诸实践。此后,英美等发达国家均试图制造此类航行器,但受制造、控制、信息等技术限制而搁浅。进入21世纪后,跨介质运动平台在现代战争中的重要性迅速突显出来,美、中、英等国又重新启动这一项目。任露泉等[2]在《仿生学导论》中提到,研究者采用仿生学研究方法,模仿具有跨介质功能的水鸟、两栖昆虫及具有滑翔能力的鱼类等生物,研制了多种跨介质航行器原理样机。美国洛克马丁公司Weisshaar[3]的“鸬鹚”仿生无人机(只能实现水下发射与入水回收,不能水下巡航)、北京航空航天大学Liang等[4]、Yang等[5-6]及麻省理工学院Fabian等[7]的仿鲣鸟跨介质航行器。然而,跨介质航行器的设计与制造涉及航行器设计、空气动力学、水动力学、多相流、机械设计、控制及信息传递等多学科领域,技术难度大,加之国际上对其真正关注的时间较短,其关键技术目前还很不成熟,目前仍然没有具有实用功能的跨介质航行器。Siddall等[8]在其研究中指出,跨介质航行器的研制需解决干飞、入水、潜行、出水4个运行模式(见图1)的关键技术,其流体动力外形既要有良好的入水及出水性能,又要有较小的流体阻力,是突破其4个运行模式关键技术的基础。

(a)干飞

(b)入水

(c)潜行

(d)出水
翠鸟是翠鸟亚目、翠鸟科、翠鸟属的一种水鸟,可在瞬间完成入水、捕食及出水等一系列高难度动作。其优良的入水性能是跨介质飞行器外形设计的优良仿生模本[9-10]。龙虱是一种具有三栖能力的昆虫纲、鞘翅目水生昆虫。Nachtigall[11]的一项研究表明,龙虱出色的水动力外形使其在游泳过程中表现出极高的游动稳定性和能量利用率。本文采用组合仿生设计思想,综合具有良好入水性能的翠鸟头部和龙虱身体的外形特征,设计跨介质航行器水空共用流体动力外形。
1 形态仿生设计流程
形态仿生最经典的案例就是“甲壳虫”汽车,外形上仿生甲壳虫,将生物形态的优美融入到工业设计上,体现人与自然和谐相处的理念,成为长久不衰的汽车造型。生物的体表形态与其自身的特有功能相适应,形态仿生不仅能够获取生物外形的美感,更能够获取生物本身特有的功能。自然界的生物经过长期的进化使自身适应外界的环境,它们优美的外形下意味着自身优异的性能。翠鸟从鸟喙尖端到头部的直径逐渐增大,入水时会使水流向身后,溅起很少的水花。日本500系列高速列车的车头仿生翠鸟的鸟喙,有效提升了高速列车的速度,且起到了降噪的效果。
Kim等[12]关于形态仿生的设计指出,设计者应根据不同的出发点和目的采取不同的设计方法和步骤。在明确自己的设计任务后,选定要仿生的生物原型,提取其形态特征和应用特征进行设计。在形态仿生设计过程中,生物形态特征的提取和处理是最为关键的步骤。形态特征构成要素包括点特征、线特征、面特征和体特征。本文选取翠鸟和龙虱两种生物进行组合仿生,提取翠鸟头部和龙虱身体形态的线特征,按生物的原始大小对头部和身体进行设计,以翠鸟的体长参数为基准,组合翠鸟的头部和龙虱的身体得到跨介质航行器的流体动力外形。
2 翠鸟和龙虱形态特征的提取
形态仿生设计以提取生物形态的主要特征为主。翠鸟头部的主要特征是从鸟喙尖端到头部的直径变化规律,龙虱身体的主要特征在于背部表面的曲率变化。翠鸟的眼部和龙虱足部周围的曲面凹陷不平,直接提取面特征不便数据处理,所以这里主要提取线特征。线特征最明显的就是生物的外轮廓线,它能充分表现生物形态的变化特征。
取成年的翠鸟和龙虱各一只制作成标本,使用全自动三维影像扫描仪获取翠鸟和龙虱的点云数据,在CATIA软件的DSE模块中对点云数据进行预处理,根据笛卡尔右手定则,建立如图2、图4所示的空间直角坐标系O-xyz。其中,将翠鸟和龙虱水平放置,使其关于yOz面对称,z轴正方向指向生物上表面,x轴正方向指向生物左侧,xOy面将生物分成上下两部分。
使翠鸟嘴部尖端与原点重合,删除翠鸟身体部分的点云数据,只保留其头部的点云数据,翠鸟头部的长度为64mm。用yOz面截取翠鸟头部,可获得上下两条特征曲线上的点云,使用xOy面截取翠鸟头部,可获得左右两条特征曲线上的点云。生物本身不是完全对称,右侧特征曲线最终可由左侧特征曲线做关于yOz面的对称变换得到。提取的翠鸟头部特征曲线如图3所示。

图2 翠鸟头部点云数据Fig.2 Point cloud data of kingfisher head

图3 翠鸟头部特征曲线Fig.3 Characteristic curve of kingfisher head
删除龙虱头部以及足部的点云,保留其身体的点云数据,龙虱身体的长度为35mm。用yOz面截取龙虱身体,可获取龙虱背部和腹部特征曲线的点云数据。利用投影功能,获取龙虱身体在xOy平面上的背部外形轮廓点云数据,只保留左侧的特征曲线的点云。提取的龙虱身体特征曲线如图5所示。
上述获取的特征曲线不光顺,不能直接用于航行器的外形设计,必须将截取的特征曲线的点云数据进行光顺化处理,特征曲线的点云数据如表1所示。
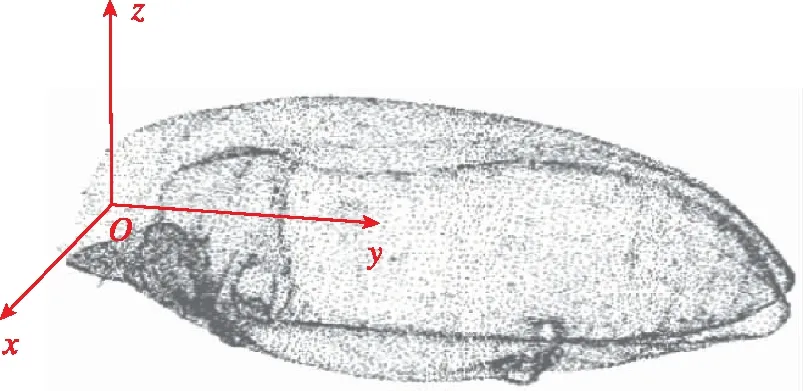
图4 龙虱身体点云数据Fig.4 Point cloud data of diving beetle body

图5 龙虱身体特征曲线Fig.5 Characteristic curve of diving beetle body

表1 特征曲线的点云数据 mm
3 特征曲线的光顺化处理
特征曲线不光顺,一方面是因为扫描时混入了外界环境的灰尘等杂质,另一方面是由于生物本身外形并不光滑。如果人为剔除特征曲线上的杂点,不仅工作量大、效率低,而且具有很大的随意性。采用拟合的方法,求出特征曲线的拟合曲线,使之在整体上尽可能与原始数据曲线近似,得到的曲线不仅能充分反应原始曲线的变化特征,而且还保证了曲线的光顺。在拟合前对数据进行预处理,删除明显的“杂点”以及生物本身凹凸不平的点,以提高拟合优度。本文用Matlab工具箱中提供的多种拟合模型进行了特征曲线模型的拟合,结果发现,傅里叶级数拟合特征曲线效果最好。式(1)是傅里叶级数的三角形式展开式。
(1)
式中,a0、an、bn为傅里叶系数。
在Matlab拟合工具箱中选用傅里叶级数作为拟合模型,a0,a1,…,an,b1,b2,…,bn的初始值设置为0, 周期T设置为体长l的2倍,ω的初始值设置为π/l。用拟合后的相关系数R-square判定拟合的好坏,从而确定傅里叶级数三角展开式n的值。各个特征曲线拟合后的数学表达式如表2所示,R-square的值均接近于1。运用拟合的方法对特征曲线进行光顺,得到曲线的数学表达式不仅能充分反应原始特征曲线的变化趋势,而且方便在CAD软件中建模。用光顺后的特征曲线包络出翠鸟头部和龙虱身体的轮廓如图6、图7所示,特征曲线的数学表达式如表2所示。

图6 光顺后的翠鸟头部特征曲线Fig.6 The smoothed characteristic curve of kingfisher head

图7 光顺后的龙虱身体特征曲线Fig.7 The smoothed characteristic curve of diving beetle body

表2 特征曲线的数学表达式
4 三维建模
贝塞尔曲线在工业设计上具有广泛的应用,它通过起始点和终止点,利用控制点来描绘出光滑的曲线。为使翠鸟和龙虱在任意y=n处的横截面与其特征曲线相交,用贝塞尔曲线连接y=n处特征曲线上的点;在y=n时,左右两侧特征曲线上的点作为起始点和终止点,求出相应的控制点,使横截面轮廓曲线与上下特征曲线相交,且关于面yOz对称。横截面轮廓线可由上下两段组成。
4.1 翠鸟头部的三维建模
4条特征曲线包络出翠鸟头部的轮廓,将翠鸟头部分成上下两部分生成曲面,上、左、右3条特征曲线构成上表面,下、左、右3条特征曲线构成下表面。翠鸟头部的横截面近似圆形,用三阶贝塞尔曲线分别连接上、下表面特征曲线。式(2)是三阶贝塞尔曲线的参数公式。
B(t)=P0(1-t)3+3P1t(1-t)2+3P2t2(1-
t)+P3t3,t∈[0,1]
(2)
如图8所示,y=n处的横截面与4条特征曲线相交于A(-a,0)、B(a,0)、C(0,c)、D(0,d)4点,点A、B即是贝塞尔曲线起始点P0和终止点P3,截面上下轮廓线在A、B点处切线方向一致,所以令控制点P1、P2的坐标为(-a,h)、(a,h)。将t=0.5时,B(0.5)=c代入三阶贝塞尔曲线公式,可求得h=4c/3。分别求得y=0,2,…,64时的横截面轮廓线,4条特征曲线作为引导线,在CATIA软件中用“多截面曲线”功能生成翠鸟头部的曲面,如图9所示。
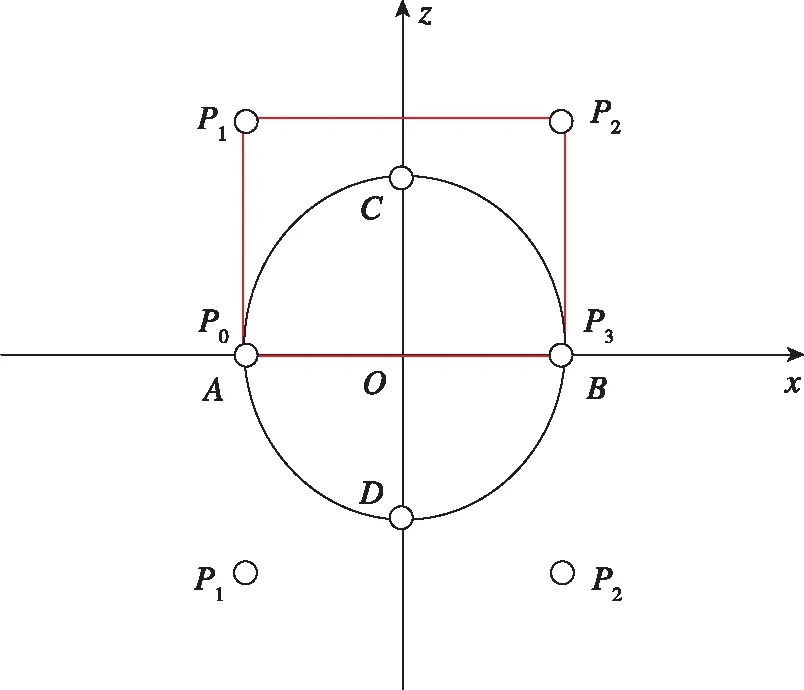
图8 翠鸟头部横截面曲线Fig.8 Cross section curve of kingfisher head

图9 翠鸟头部建模Fig.9 Kingfisher head modeling
4.2 龙虱身体的三维建模
用二阶贝塞尔曲线生成龙虱身体横截面的轮廓线。
B(t)=(1-t)2P0+2t(1-t)P1+t2P2,t∈[0,1]
(3)
式(3)是二阶贝塞尔曲线的参数公式。图10是处龙虱身体横截面轮廓曲线,由起始点P0(-a,0)、终止点P2(a,0),控制点P1(0,h)分别得到上下轮廓线。当t=0.5时,B(0.5)=c,代入二阶贝塞尔曲线公式,可得到h=2c。分别求得y=0,2,…,34时龙虱身体的横截面轮廓线,4条特征曲线作为引导线,在CATIA软件中用“多截面曲线”功能生成龙虱身体的曲面,如图11所示。

图10 龙虱身体横截面曲线Fig.10 Cross section curve of diving beetle body

图11 龙虱身体建模Fig.11 Diving beetle body modeling
4.3 翠鸟头部与龙虱身体的组合
翠鸟的体积明显大于龙虱的体积,从生物样本点云处理得到翠鸟头部的长度是64mm,龙虱身体长度是35mm。根据翠鸟的体长将龙虱身体相应放大使之与翠鸟头部结合。翠鸟体长170mm,将龙虱整体放大2.5倍,翠鸟头部与龙虱身体用20mm长的“脖子”连接。在CATIA软件中,翠鸟头部和龙虱身体的4条特征曲线分别用样条曲线连接,作为“脖子”的特征曲线,用“多截面曲线”功能生成“脖子”曲面模型。翠鸟头部和龙虱身体的组合体如图12所示。跨介质航行器流体动力外形的建模如图13所示。

图12 翠鸟头部和龙虱身体的组合体Fig.12 Combination of kingfisherhead and diving beetle body

图13 跨介质航行器流体动力外形Fig.13 Fluid dynamic shape for cross-media vehicle
5 结论
仿生设计是转化模本优异功能的重要手段,其本质是革新和创新,是研发先进系统与创造新产品的重要途径。本文采用组合仿生的设计思想,对翠鸟头部和龙虱身体形态进行组合仿生。在提取生物外形的特征曲线数据后,用拟合的方法得到特征曲线的表达式,进而获取光顺的特征曲线。将放大2.5倍的龙虱身体和翠鸟头部连接,得到一种跨介质航行器的流体动力外形。本文展示了形态仿生设计的一般流程,设计的仿生跨介质航行器的流体动力外形运用了翠鸟和龙虱的形态特征,保持了原生物形态的尺寸比例,基于特征曲线方程的跨介质航行模型可实现对航行器外形的修改和优化,为跨介质航行体流体动力外形设计提供参考。
