BMS与直流充电机CAN通信网络通信品质的分析与评价
2020-04-07于红秀王娇娇
于红秀,王娇娇,李 晓,陈 赫
(中国汽车技术研究中心有限公司,天津 300300)
1 前言
2015~2016年中国新能源汽车呈现爆发式增长,产量37.9万辆,同比增长3.5倍,2017年的持续增长使得中国成为全球最大的新能源汽车的增量市场。在未来5年全国新能源汽车将达500万辆保有量的政策目标的预期之下,预计到2020年前新能源汽车产量将会保持大约40%的年复合增速,未来5年继续高增长势头。
发展新能源汽车的关键问题之一就是解决其在使用过程中的充电问题。新能源汽车之所以无法与传统汽车竞争的主要原因在于其电池充电速度慢、续航里程短。目前电动汽车的充电方式主要分为直流充电和交流充电两种,一般交流充电的充电功率不超过100kW,而且充电速度较为缓慢,为提高新能源汽车在发展中的竞争力,发展大功率直流充电技术成为一种趋势。为保证直流充电的规范性,国家在2015年底出台了GB/T 27930-2015,对充电过程中BMS与非车载充电机CAN通信网络的通信过程做了详细的规定与要求,其目的在于最大程度上统一BMS与非车载充电机的充电过程,减少差异,提高兼容性。
新能源汽车是中国汽车发展的重要方向,作为其关键性技术之一的电动汽车整车通信网络技术已经成为国内电动汽车研究领域的热点课题。在电动汽车实际使用过程中,实现车辆与非车载充电机的充电互联互通是整个行业最为关心的问题。通过对一些车辆及非车载充电机的检测发现,测试合格的车辆及非车载充电机进行充电匹配测试时会出现无法充电的现象,对其数据进行采集分析发现:在充电过程中,BMS与非车载充电机CAN通信网络的通信品质不稳定导致了均符合国标的车辆与非车载充电机无法匹配充电;除此之外,还有在不改变BMS及非车载充电机程序时,在不同时间对相同测项进行测试,一次测试通过,另一次不通过的现象产生,在对该问题进行分析后发现主要是由数据通信过程中的不稳定导致。因此,BMS与非车载充电机之间CAN通信网络在充电过程中的稳定性,直接关系到电动汽车使用性能。目前,国内外整车企业及仪器设备企业对BMS与非车载充电机之间CAN通信网络在充电过程中的稳定性都有极大的关注,都在积极探索BMS与非车载充电机之间CAN通信网络在充电过程中的稳定性试验评价技术。
对于上述问题,在国家新出台的几项充电国标中有关的条款略显不足。GB/T 27930-2015只是规定了BMS与非车载充电机之间CAN通信网络在充电过程中的数据交互流程,并未对该交互过程的稳定性提出具体要求。目前已有相关企业开始着手该方面的测试分析研究。
综上所述,BMS与非车载充电机之间CAN通信网络在充电过程中的稳定性评价将是解决充电互联互通的关键所在。
2 测试平台系统硬件开发
测试平台主要由直流充电机通信系统、数据采集控制系统、BMS通信系统等3部分组成。由于测试平台集成的各设备分别采用CAN总线、485总线或232总线等不同的通信方式,为实现测试平台数据的集中采集及对测试平台各设备的远程控制,需要开发以单片机为核心、并且基于CAN总线的信息采集及通信方式转换信息单元,将各设备通信方式统一转化为CAN总线通信方式,构建测试平台CAN总线通信网络硬件平台。测试系统的主要部分如下。
1)直流充电机通信系统,包括电源模块、直流充电机通信模块。其中,电源模块为车辆充电时提供动力,通信模块在充电过程中与车辆进行数据交互。
2)BMS通信系统,包括负载和通信系统,用于充电过程中的电能消耗和数据通信,从而测试评价系统通信网络的通信特性。
3)数据采集、控制系统部分,包括通信控制器、数据采集器、示波器等,主要采用CAN总线进行各设备间输入输出数据交互,从而进行各类相关控制参数的采集和控制。
在测试过程中,通过数据采集及控制单元将车辆和充电桩的连接通过中间转接设备引出,利用转接设备采集充电过程中的通信数据;由于连接信号已经引出,可通过延长通信线施加相应的干扰,本研究主要在通信线之间施加干扰,对干扰期间相关的数据进行分析对比,得出影响通信品质的主要因素。
2.1 测试平台系统软件设计
BMS与直流充电机CAN通信网络品质的测试系统除了需要进行实时通信,还需要采集CAN网络中CAN-、CAN+电压以及响应时间等信息。试验台集成的各设备均采用了周立功CAN的通信方式,为了实现试验台数据的集中采集以及对试验台各设备的控制,构建试验台CAN通信网络信息单元作为CAN总线网络的节点,在完成所指定的信号采集任务的同时,还接收工控机发送的CAN报文信息,对报文进行解析,然后按照目标设备的通信协议将控制命令信息重新打包传递给相应设备,实现基于CAN总线的通信控制。
2.2 测试平台系统软件设计的评价参数
2.2.1 通信数据的完整性
此参数是指在充电过程中,整车和充电桩之间的通信数据无漏帧丢帧的现象出现,数据保持完整。电动汽车充电过程中如何保证通信数据完整无损的进行传输是保证充电顺利进行的重要前提。
如图1所示,测试过程中采集车辆与直流充电机之间通信的数据,并通过测试软件对数据进行分析。

图1 数据采集图
为实现上述功能,在对测试系统软件设计时,将符合GB/T 27930-2015的通信数据相关数据信息导入软件系统中,包括数据的字节长度、发送周期、数值范围等信息,通过编程实现测试系统的可识别功能,对测试过程中出现的数据丢失等情况及时响应。
2.2.2 通信过程的灵敏度
CAN通信数据的灵敏性是指整车或者充电桩在接收完对方的数据之后做出正确响应的时间。本研究将通信过程的灵敏性分为两个部分:一个方面是在正常通信过程中车辆和直流充电机之间数据的响应情况;另一方面是指在异常条件下车辆和直流充电机的响应能力。
本课题在软件部分中加入实时显示波形图的功能,测试过程中可以通过波形反映数据的灵敏度。除此之外,波形图中增加故障信号,便于查找故障发生的时刻,进而反映测试样品响应故障的灵敏度。测试数据响应图如图2所示。
2.2.3 CAN通信数据的抗扰性
本研究中的干扰主要是指硬件的干扰,对整车和充电桩之间的通信施加干扰,将干扰中的数据与正常数据进行比对,未出现异常的情况下,抗干扰性为1,异常情况出现超过20次,抗干扰性定义为0,0~20次之间的抗干扰性数值线性变化。同通信过程灵敏度的实现方式类似,测试系统可实时检测通信信号 (CAN+、CAN-)的电压波动情况,从而对通信信号的稳定性进行评价。
3 测试方案设计
3.1 CAN通信数据的完整性测试系统
此项目针对车辆和充电机在充电过程中的通信数据的完整性,通过测试台架,分别读取车辆和充电桩的通信数据,检查其数据的完整性。测试台架如图3所示。

图2 测试数据响应图
在对车辆进行测试时,用到的是图3中的左半部分和中间部分,右半部分连接的是电动车,在对充电桩进行测试时,左侧连接的充电桩。整个测试过程通过控制器对其中的时序和通信情况进行控制和调节,并模拟充电中的各种问题来判断车辆与充电桩的性能。
3.2 试验方案
电动汽车与非车载充电机之间的通信数据的稳定性测试采用的是控制变量的方法对不同工况分别进行设定,即每次只考察一个参数,维持其他参数不变。本研究中主要考虑3个参数来设计实验,分别是数据完整性、数据灵敏性和数据的抗扰性。试验工况如表1所示。
实验时,首先测试被测车辆和充电桩的数据完整性,对通信数据完整的样品进行数据灵敏性测试,对完整性符合且灵敏性较好的样品进行抗扰性测试。对同一样品的一系列数据进行比对分析,得出本文的试验结论。

图3 测试系统示意图

表1 实验工况点
4 测试数据及分析
4.1 通信数据的完整性
本研究对5个车型的数据完整性进行了测试。由于测试过程中数据量大,本研究对测试过程中数据进行了筛选,将关键环节的数据整理如表2~表6所示。

表2 样品1测试数据

表3 样品2测试数据

表4 样品3测试数据
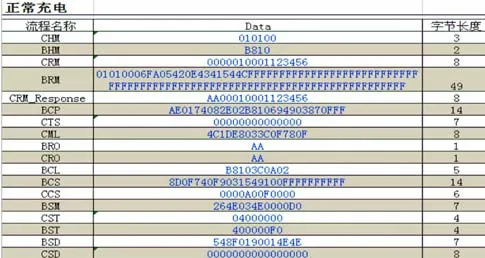
表5 样品4测试数据

表6 样品5测试数据
试验过程中,对每个样品的测试电流均控制在5A,在无干扰情况下,测试所选所有样品的通信数据均是完整的。GB/T 27930-2015自发布以来,各个车企、充电设施企业以及BMS等相关企业对充电过程中的通信数据进行了调整,由于标准对充电过程进行了规定,需要每一个过程的数据都要完整发送,所以车辆在未加干扰情况下充电成功的通信数据均是完整的,未见异常。
4.2 通信数据的灵敏性
本研究对上述5个样品的通信数据灵敏度进行了测试与分析,如图4~图8所示,图中横坐标分别表示如下阶段:握手阶段、辨识阶段、参数配置阶段、准备就绪阶段、充电阶段、充电结束阶段、充电统计阶段。

图4 样品1响应时间

图5 样品2响应时间

图6 样品3响应时间

图7 样品4响应时间
比较上述5个样品的响应精度可以发现,响应时间的峰值集中在数值4(即准备就绪阶段)。车辆和充电桩在准备就绪阶段,除了发送数据与对方进行通信外,识别对方数据中的信息进行判定,还需要传输数据控制充电继电器的吸合,此阶段的通信灵敏度最差。

图8 样品5响应时间
比较5个样品的数据发现,样品1在充电准备就绪阶段的响应时间约为800ms,样品4在此阶段的响应时间约为300ms,样品2在此阶段的响应时间约为200ms,样品3和样品5此阶段的响应时间约为120ms。在充电准备就绪过程中每帧数据的发送周期有50ms/250ms等,稳定精度较好的样品与稳定精度差的样品在时间上相差约680ms,相差约13/2个数据周期,可见市面上的产品在通信系统的响应精度还是存在明显差别的。
此项测试也说明,当车辆或者充电桩在通信的同时需要处理其他流程时,通信灵敏性会变差。GB/T 27930-2015中规定车辆与非车载充电机之间的节点应由BMS与充电机两个节点组成,若是车辆或者充电桩内部某个部件共用此节点,会导致除了充电的国标报文外有其他报文进入对方的识别系统,干扰充电桩和车辆的识别速率,影响充电过程。但是车辆和充电桩的数据负载率究竟有多大,有待进一步研究。
4.3 通信数据的抗干扰性
由于样品情况及时间等原因,此项目仅针对其中1个车型和1个充电桩进行。
本研究中采用的测试干扰为浪涌冲击和传导抗扰两种,施加原则与整车EMC测试时的干扰等级一致,分别施加浪涌冲击1~4级以及传导抗扰1~4级干扰,将未施加干扰时的数据和施加不同等级干扰时的数据进行比较发现,随着干扰等级的增加,CAN通信数据出现故障的次数逐渐增加。现场测试如图9所示,测试数据如图10~图14所示。

图9 现场测试图

图10 正常充电数据

图11 施加1级和2级干扰的数据

图12 施加3级干扰时数据

图13 样品1施加4级干扰时数据

图14 样品2施加4级干扰时数据
由上述数据,对通信系统未施加干扰以及施加等级较低的干扰时,通信系统不受干扰影响,通信数据完整准确,随着干扰等级的逐渐增大,通信数据开始出现异常,并且异常数据出现的频率随着干扰等级的增加在不断增加,当干扰增加到4级时,异常数据的出现频率已经达到了一个较高值,试验中发现即使在4级的干扰情况下也未影响车辆和充电桩之间正常充电的进行。但在干扰施加和撤离的瞬间,充电的电流和电压都有一个明显的突变,影响充电体验。
5 总结
本研究对充电过程中车辆与非车载充电机之间的CAN通信网络进行了研究,研究对象是通信网络的稳定性,并通过3个参数对通信网络的稳定性进行了评价,分别是通信数据的完整性、灵敏性以及抗扰性。通过设计不同的测试方案,对CAN通信网络的整体情况得出如下结论。
1)所选测试样品在未加干扰时均可保证通信数据的完整性。
2)所选测试样品在未加干扰时均可在指定时间内响应对方的通信数据并回复;通信数据的灵敏性会随着车辆或者充电桩控制充电系统其他部件的增加而变弱。
3)所选测试样品可承受一定程度的浪涌冲击和传导抗扰,但随着干扰等级的增加,通信品质变差,通信中出现的错误也会增加。
6 展望
针对本研究得出的结论,建议后面的工作围绕以下几个方面开展。
1)增加软件干扰测试部分,即在正常充电过程中,发送帧ID、帧内容等不在标准范围内的数据对通信过程进行干扰,并变换干扰数据的发送周期,找出被测系统的CAN容错率,为标准的条款提供数据支撑。
2)增加干扰等级及干扰存在时间,在本研究的基础上,增加干扰等级及干扰施加时间,直至充电失败,找出被测充电系统的抗干扰程度。
3)设计一些针对CAN通信的测试方案,例如CAN+、CAN-电压异常、阻值异常等情况,从硬件和软件两个角度分析影响CAN通信品质的因素。