曹妃甸项目倾斜摄影生成三维模型的实践总结
2020-04-02张理
张 理
(中国恩菲工程技术有限公司, 北京 100038)
0 前言
三维实景建模技术在土地规划、灾害监测和国防测绘等应用领域起到基础和核心作用[1],倾斜摄影技术有效地提高了三维建模的生产效率,大大降低了三维模型数据采集的经济成本和时间代价[2]。目前实景建模技术对于有色行业应用的还比较少,工业厂房多以框架结构或者钢结构为主,厂房间距离比较狭窄,厂区综合管网、管道系统复杂。这些条件对图像采集带来一定的困难;软件对于孔洞的处理不够理想,需要后期对模型进行修补等,这些客观条件会给实景建模工作带来很大的困难。本文以公司设计建设的河北省唐山市曹妃甸工业园区某冶炼厂为例,从项目启动到结束期间,分别对厂区进行三次实景建模,根据这三次建模过程总结出实景建模的工作流程,并对过程中发现的问题提出解决方案或建议。
1 ContextCapture软件的模块介绍
目前世界上支持多视角影像三维实景建模的软件有许多,诸如ContextPapture、PoxelFactory、Pix4D、VirtuosoGrid、VIrtuoZo、DP-Smart、PhotoScan等软件,其高度自动化和智能化给建模带来极高的效率[3]。
ContextCapture软件可以在无人工干预的情况下,基于影像生成高分辨率三维模型。Master是一个人机交互界面,相当于一个管理者,不执行处理任务,它将任务分组成若干及基本任务、然后提交到任务序列。;Engine即是引擎端,不与用户交互,它只在计算机后台运行,只负责对任务进行处理,可独立Master打开或者关闭;Viewer可预览生成的三维场景和模型。
2 项目背景
该项目建设所在地位于河北省唐山市曹妃甸工业园,陆路距唐山南部海岸18公里,投资1亿元人民币。项目工期紧,设计施工工期一年,设计专业十几个,现场多专业协同工作多,对项目进度管理和安全管理工作提出很高的要求。
项目分为三个大施工段,有多个构件堆场。使用三维实景建模技术主要解决以下问题:
通过三维实景建模对项目进行场地功能区划分、道路规划、塔吊布置,提高场地利用率、减少二次搬运、提高材料堆放和加工空间使用率;由于该项目对混凝土预制屋架的成品保护要求高,利用实景模型模拟场地狭小的施工现场环境下预制折线屋架吊装;通过三维模型与实景模型结合,对大型构件吊装进行演示,模拟吊车站位和输出;三维实景模型和设计模型相结合,展示工厂总体布置;定期扫描厂区,通过三维进度模拟与现场实景三维模型进行对比,实时管控进度计划。
3 建模流程
实景建模的过程主要分为影像数据采集、实景数据处理两个方面。
其中影像数据采集是获得三维模型的重要基础工作,图像质量直接决定了后期生成的三维模型质量,图像的拍摄高度、拍摄角度、重叠率直接影响了三维模型的分辨率和准确性,而场地情况,如气象、地形拍摄时间等又是直接影响拍摄的因素,所以在项目开始前期对建模场地要进行勘察,根据场地情况、模型分辨率和对图像重叠率的要求,合理规划拍摄路线。针对复杂构筑物有时需要补拍影像。
数据处理有两种操作模式,一种是单机式,一种是集群式。集群式的好处是建模速度快、效率高,需要在同一局域网下操作,且每台计算机的软件版本相同。实景建模工作流程图如图1所示。
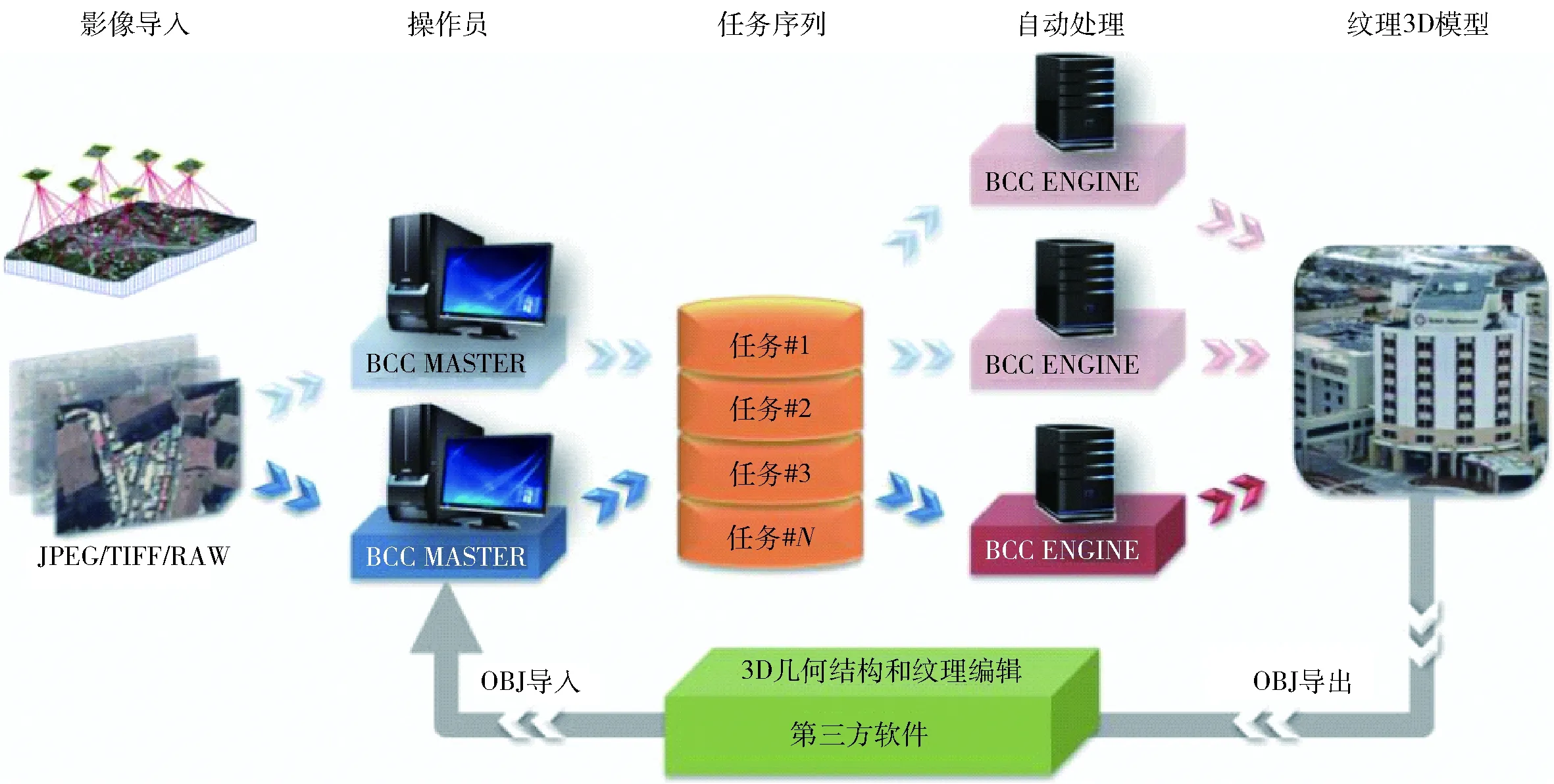
图1 三维实景建模工作流程
4 影像数据采集
本项目厂区长度为500 m,宽度260 m,设计建模精度为5 cm。采用的是大疆精灵4PRO无人机进行图像采集,相机传感器有效像素2 000万;镜头参数FOV84°、8.8 mm/24 mm(35 mm格式等效);图片分辨率5 472×3 078;依据公式:“投影像素大小×焦距×影像的最大尺寸=传感器宽度×拍摄距离”计算出本次拍摄的设计飞行高度187 m。经过现场勘查,测区周边只有东侧有在运行中的塔吊和发电厂的烟囱,距离100 m;测区内最高建筑物均低于设计高度。
根据软件对影像数据的要求,采集的影像应满足以下几个条件: 被拍摄物体的每个部分至少从三个独立视角拍摄;连续影像的重叠区域不少于70%;同一物体部分的不同视角间应保持15°以下的夹角。本次拍摄采用单镜头多角度的拍摄方式,分别对项目场地设置了垂直、前、后、左、右45°五个不同拍摄角度采集图像。对于航拍的照片,建议纵向重叠率和横向重叠率分别不低于80%和50%。
飞行控制程序为DJI GS PRO软件。航线设计前通过手机定位测定厂区边界坐标,将坐标信息输入飞控软件中,得到航拍的范围。然后设置飞行高度,重叠率,镜头角度,分别保存五条飞行线路。可以看到,通过调整高度和重叠率飞控软件会自动计算出航线间隔、拍摄间隔,避免了因经验不足造成的重叠率不够的情况。飞行过程中选择断点续航模式,无人机电量不足自动返航,这样即保证了无人机的操作安全,又能保证航线拍摄照片的重叠率,减少重复拍摄。
项目冬季气温低,风力大,对于影响采集工作带来一定影响。影像采集时环境气象条件良好,最低温度-5 ℃、风力2~3级。五条线路共起飞12架次,耗时4 h,共采集照片863张,其中可用于实景建模的有效照片842张。
5 实景数据处理
通过新建工程创建项目目录(保存文件路径不能有中文字符)。将五条航向照片分组导入区块内,无人机航拍时自带GPS定位系统,并将拍照时的概略位置信息实时写入了照片的EXIF信息内,故无需再次将位置数据导入其中[4]。运行空中三角测量计算,计算出每个输入影像组的影像组属性及其姿态。通过区块属性和空三计算报告显示计算或评估结果,成功的空三计算应该会计算每幅影像的位置和角元素。提交重建任务页面会提示“可进行生产”,同时会根据计算机内存大小提示是否需要切块。最后是产品输出,提交生产时需要打开引擎ContextCapture Engine。
实景数据处理流程如图2所示。
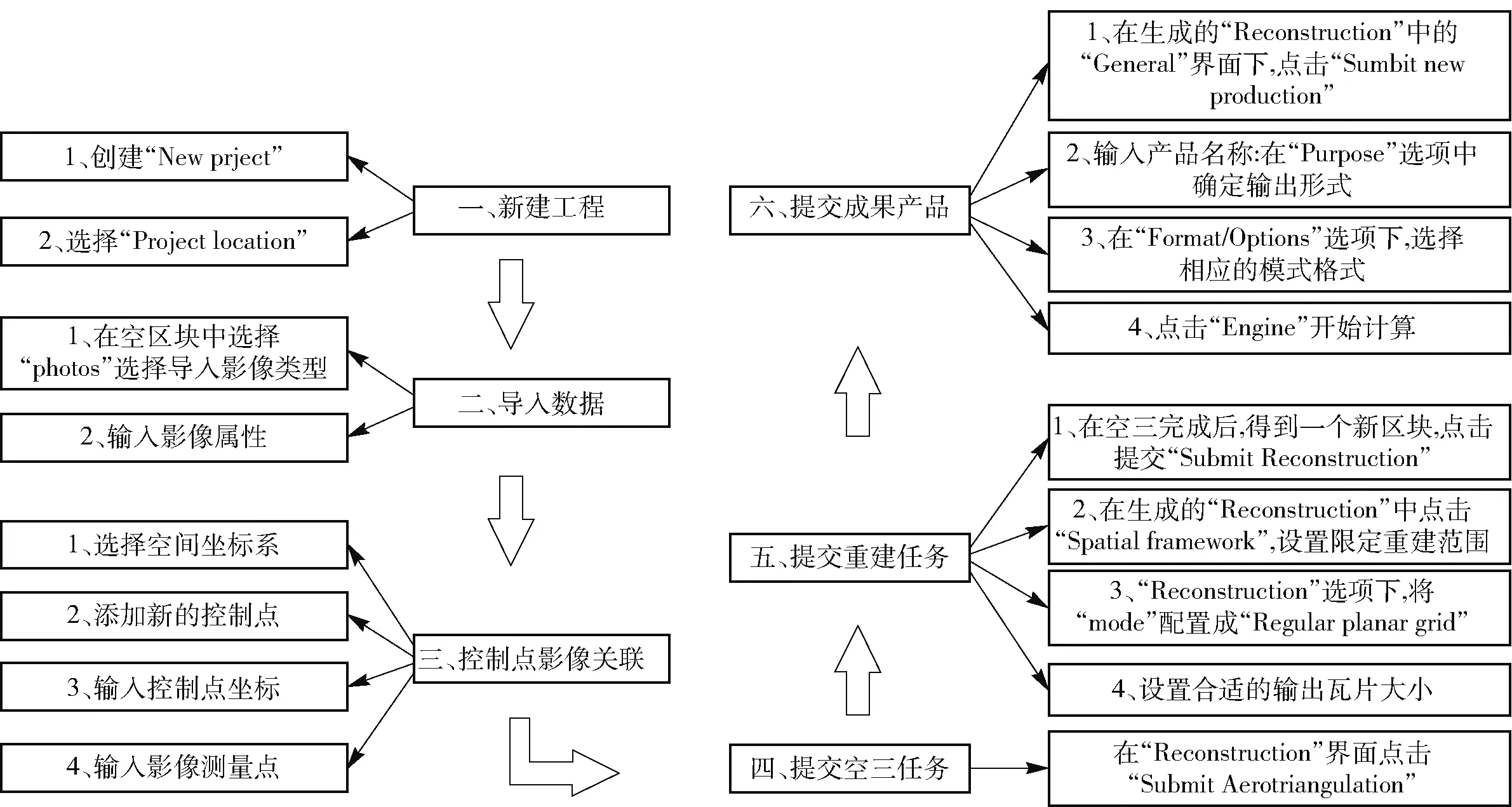
图2 实景数据流程图
注意事项:
控制点是对区块进行空中三角测量计算期间使用的可选定位信息。向区块添加控制点后,可以准确的将区块标上地理参照并避免长距离度量失真。此外,在空中三角测量计算后,还可以使用控制点执行质量控制。如果空中三角测量计算包含3个或者多个控制点,其中每个控制点具有2个或者多个影像测量,则它可以使用一组控制点。
在空三计算中,会显示丢失的影像数量。如果丢失的影像过多,或者重叠不足或输入数据不当,给空三计算可能会失败。如果重叠不够或输入不当导致影像丢失,这种情况下可以采用以下几种方式:
(1)返回输入区块,根据需要修改属性信息,然后尝试新的空三计算:
(2)使用输出区块作为中间结果,然后尝试从此区块执行新的空三计算,以计算缺失的属性。
重建项目必须先编辑空间框架和处理设置,然后在开始生产。开始生产之后,空间框架选项卡为只读。在这种情况下,可以复制重建项目,从而获得一个完全可编辑得重建框架。使用重建空间参考系统中的轴对齐三维框,可以设置兴趣区域。默认情况下,兴趣区域自动集中于分辨率明显的区域,通常会比我们设计的区域范围大,如果重建项目具有地理参考,则可使用挤出多边形从KML文件更精确的定义该区域。单击“从KML文件导入”按钮,从KML文件指定兴趣区域。KML文件只能定义二维多边形,可以从界面定义顶部和底部高度。
生产项目在ContextCapture Master中定义,由ContextCapture Engine进行处理。生产项目由以下属性定义:输出格式和选项;空间参考系统和范围;目标。软件生成的三维模型文件类型有:
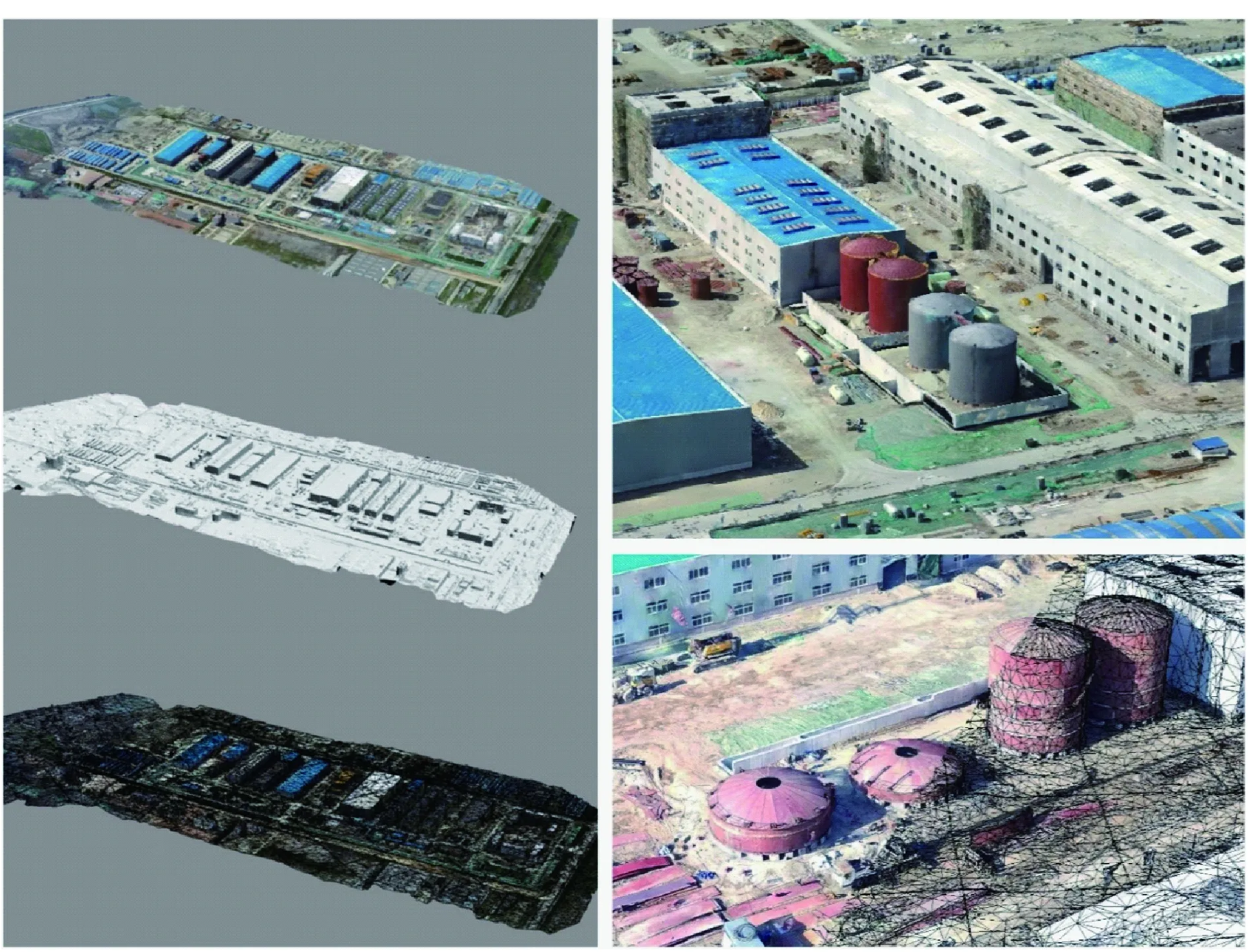
图3 重建生成真实的3MX格式实景模型
(1)三维网格:生成为第三方可视化和分析软件优化的三维模型。
(2)三维点云:生成色彩点云,可以在第三方软件可视化和分析。
(3)正射影像/DSM:生成可互操作的光栅图层,可以在第三方GIS/CAD软件或影像处理工具中执行可视化和分析。
(4)用于进行修饰的三维网格:生成可在第三方软件中编辑的三维模型,然后重新导入ContetCapture后进行后续生产。
(5)仅参考三维模型:生成ContetCapture Master内部使用的三维模型,用于质量控制,并作为后续数据生产的缓存数据。
6 实景模型数据的提取与应用
我们得到的实景模型后不仅仅可以用于展示,还可以通过实景模型提取原始地模数据。相对于传统二维设计从等高线、高程点提取数据的方法,使用实景模型数据更加便捷高效。避免测绘数据的高程信息在重复参考后数据丢失的情况。把制作好的数字地模直接导入到Bentley OpenRoads Designer、Bentley GEOPAK Site等场地设计软件进行三维场地设计。可应用于场地规划、土方量计算、洪水淹没区演示等方面。下面以Bentley Descartes为例介绍提取数据的过程:
首先打开Bentley Descartes软件,将我们制作好的实景模型通过菜单栏中的连接- 实景网络- 连接,导入进来,软件支持3MX、3SM两种格式。导入实景模型后在,执行提取- 实景模型- 地面提取命令。根据实景模型中的构筑物的大小进行设置参数。提交提取后会生成.pod/.stm/.tin文件,并且会自动参考到软件中。
*.Pod文件可以通过分组设置,对生成的数据进行筛选,去除人为创建的构筑物、地表植被等数据,仅保留地面数据。
*.Stm文件抽取数据时已经把构筑物、树木植被过滤掉。
通过上述几步操作,我们就可以得到原始地形数据。
7 经验教训
本次测试项目采用的是大疆精灵4PRO消费级无人机。在气象条件良好的情况下续航时间为20 min。由于项目所在地在北方沿海地区,风力比较大、冬季气温低,大大降低了无人机的工作效率。同时配备的单镜头也不能满足多角度拍摄,需要多次规划航线进行拍摄。这种方法虽然从成本控制上降低了硬件设施的投入,但需要花费更多的人力资源,并且在重叠率方面需要需要对航线进行更加精确的设计。
目前市面上的固定翼飞机、专业级多轴无人机在起飞重量和续航时间上都有提升,同时飞行姿态更加稳定。机身搭载倾斜摄影相机,(一个垂直镜头,四个方向倾斜镜头),一次拍摄同时可以得到五张不同角度照片,能够更好的提高工作效率。
无人机航拍操作有很高的专业性,飞行操控者需要能够熟练操控无人机。同时需要对周围航线规划高度内的高大构筑物、障碍物进行勘察,规划航线时避免这些危险区域。在人员密集的区域进行航拍飞行时一定要制定安全措施和应急预案。
由于光影的影响,照片暗部细节模糊对空三计算影像比较大,所以最佳的拍摄时间为10:00~14:00。这个时间段太阳高度最高,阴影面积最小,所生成的模型细节更加清晰完整。
由于倾斜影像具有高分辨率、高重叠度,能生成高度密集且数量巨大的稠密点云,参与模型计算的数据量过大[5],因此对计算机的硬件要就较高。建议计算机具有至少16GB RAM、一个八核CPU和一张NVIDIA GeForce GTX 860M显卡。
对于场地复杂狭窄,不利于无人机飞行的区域,建议结合激光点云技术,形成完整的场地模型。
8 结束语
综上所述,本文介绍了基于ContextCapture在曹妃甸项目中实景建模的过程。利用倾斜摄影进行三维建模,具有数据采集简单,建模过程人工干预少,成模速度快,精度高、能够真实展示项目实景情况的特点。三维实景模型可以用于前期场地利用方案研究,确定坐标点,计算挖、填土方量,展示设计方案,优化施工场地布置,监控现场工程进展情况,进行安全评估,测量改造项目原有设施尺寸数据,获取难、险地形(索道项目)工程数据等功能,成本低,工程应用前景广阔。
