一种智能通信控制系统的设计与实现
2020-04-01施京何煦施佳赵久利
施京 何煦 施佳 赵久利
摘要:针对地面设备与空中快速移动机载设备之间的通信需求,提出了一种智能通信控制系统的构建方案,通过采用一种智能控制及防绕线算法,对伺服云台及通信设备进行控制,达到快速、准确地调整通信设备天线方向,实现对移动目标快速自动化跟踪,从而确保二者之间良好通信的目的。该系统的设计方法还可以推广应用到其他安防、高速路监控等领域。
关键词:智能通信控制;伺服云台;防绕线;自动跟踪;地面设备;机载设备
中图分类号:TP273文献标志码:A文章编号:1008-1739(2020)22-62-5
0引言
随着科学技术的不断发展和各种工程应用需求的扩展,使用机载设备对地面进行监测的需求不断增加,机载设备与地面设备之间的数据传输日渐频繁,传统的通信方式已难以保证二者之间远距离通信。通常情况下机载设备使用全向天线与地面设备进行通信,而地面上有使用定向和全向天线2种模式。地面上使用定向天线虽然可以与机载设备进行较远距离的通信,但是由于机载设备飞行速度快、活动范围大,难以保证机载设备在地面通信设备的定向通信天线波束范围内,导致双方无法进行有效通信。如果地面通信设备使用全向天线时,由于全向天线增益低,当机载设备距离地面设备较远时,又难以保证双方之间远距离的通信。如何构建一套地面设备与机载设备之间良好通信的智能通信控制系统就成为了急需解决的问题。
1系统设计
为了能够实现地面与机载设备之间较远距离的通信,主要解决的是二者之间通信天线角度实时匹配问题。机载设备存在移动速度快、方位变化大、需要接收各种信号的特点,一般选用的通信天线为全向天线。为了增加通信的距离,基本上从地面通信设备着手,地面通信设备选用定向天线,然后将通信设备(含通信定向天线)安装到具备水平和俯仰方向转动的伺服云台上,通过计算机控制伺服云台实时转动,使通信定向天线始终自动对准机载设备的方向,这样就可以达到较远距离通信的目的。
在智能通信控制系统设计时,需要重点解决以下三大问题:
①解决地面设备如何实时跟踪移动的机载设备,保持通信双方远距离良好通信的问题;
②解决限位模式云台在部分位置转动效率不高以及存在死角的问题;
③解决无限位云台上面安装设备的线缆在随机控制的转动过程中缠绕到云台上会导致云台损毁的问题。
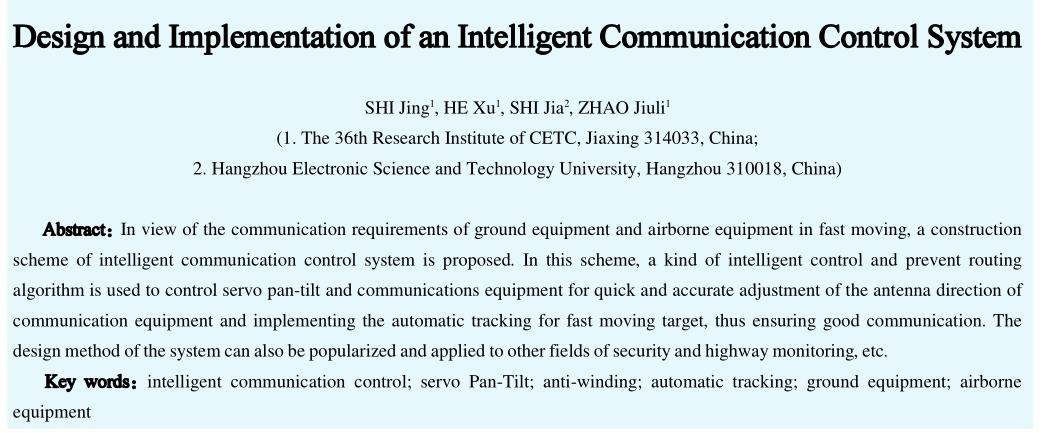
智能通信控制系统的简易模型可以由1台笔记本电脑(含云台智能控制软件,也可以使用显控台计算机加显示器替代)、1套伺服云台设备、1个网络转RS485单元(可选一个RS232转RS485单元)、1套GPS接收机(含天线)、1套地面通信设备(含定向天线)和1套机载通信设备(含全向天线)组成,如图1所示。
系统使用交流220 V工作,通过各类电源适配器提供所需要的设备直流电源。系统支持RS232或网络控制模式,当通过RS232接口控制云台时,笔记本电脑需要有2个RS232接口,再加上RS232转RS485单元;当通过网络控制云台时,笔记本电脑需要有1个RS232接口、一个网络转RS485单元。当系统工作在固定位置时,GPS接收机可以在读取系统初始位置信息后,不再连接,用以解决串口不足时的应用。选用网络接口的GPS接收机时,可以在系统上增加一个交换机来实现网络的连接。笔记本或显控台没有RS232接口时,也可以使用USB转串口(RS232)的转接线实现物理上的连接,这些都比较容易实现。
通过设计的系统控制软件,可以在系统初始参数设置时,根据硬件的具体情况配置选择云台的控制模式(网络或RS232)。采用网络工作模式时,设备的部署更加灵活,笔记本电脑(显控台)可以部署在离通信设备较远的位置。
系统具备全自动跟踪机载设备能力。为了实现最大的通信距离,地面设备使用的是定向天线,由于直升机速度快,如果定向天线不能够有效对准,将大大减少地空之间的通信距离。本系统通过地面设备的云台控制实现自动跟踪直升机的位置,从而大大提高了地面與空中的通信距离。同时,通过网络方式遥控云台工作,解决了原先串口控制方式中串口缺少、串口传输距离近的问题。通过软件自动实现云台转动的角度范围和转动方向控制,解决了传统的云台限位带来的在限位临界位置到达需要位置速度慢和存在误差较大导致跟踪失败的问题,解决了云台上安装设备线缆缠绕在云台上导致云台损毁的问题。
2系统工作原理
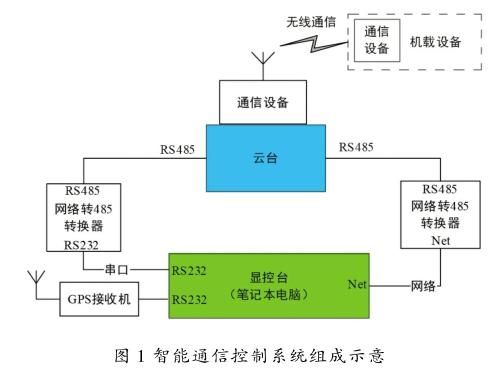
机载设备升空后,上面的设备可以定时下传航迹信息,当地面设备(显控台或者通信设备)与机载设备通信正常时,会接收到下传的航迹信息,从中可以获取机载设备的经度、纬度和高度等信息;结合地面设备的位置信息(经度、纬度、海拔高度)计算出云台需要转动的方向(包括水平方向、俯仰方向),然后下发云台控制指令,实现控制伺服云台转动到对准机载设备的方向,从而实现地面设备与机载设备保持良好的通信。伺服云台控制流程图如图2所示。
3防绕线设计方法
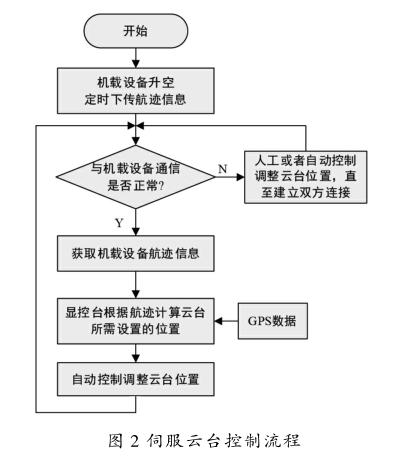
由于安装在伺服云台上面的通信设备(天线等)有相关的电缆(如射频电缆、电源线等),在转动过程中会缠绕到云台旋转体上,在达到一定的圈数后会引起云台无法转动,严重时会导致云台内部的电机损毁。因此需要对云台的控制范围进行有效控制,使其在一定的范围内转动(此时不会引起绕线)。首先需要测试出伺服云台顺时针或逆时针水平转动时不会引起绕线的总区间,将其中间位置设置成初始位置,其总圈数的一半(取整)即为可以正反转动的圈数范围。俯仰方向一般范围不大,俯仰角度不大于90°,俯仰转动时不会引起绕线问题。
为了能够及时获取云台转动和当前位置的信息,需要在显控台与云台之间建立通信协议,通过软件进行记录云台的转动轨迹,然后根据云台允许的转动范围,进行综合计算得到需要转动的方向和角度,通过与云台之间约定的指令,控制云台的转动方向和角度,而不是让云台随便转动。根据云台的转动特点,在有些转动角度,如180°左右时,考虑到机械误差和云台内部自动转动机制判断可能存在误差,此时需要进行多次(一般软件中取为2次)控制才能取得正确计数(圈数)和防绕线的效果。
伺服云台防绕线智能控制流程图如图3所示。
4系统软件设计
根据上述系统设计构想,智能通信控制系统的软件设计主要包括网络通信模块、通信接口配置模块、GPS信息接收模块、信息处理显示模块、防绕线处理控制模块、伺服云台控制模块。其中网络通信模块主要实现显控台与通信设备之间的网络通信和数据交换。
通信接口配置模块进行云台控制参数设置,主要包括控制接口类型、串口设置、告警设置、速度控制等参数;控制接口类型分为网络接口和RS232接口;RS232串口设置,包括波特率选择:300/600/1 200/2 400/4 800/9 600/19 200 bit/s;数据位选择:7/8位,停止位选择:1/2位;校验位选择:无/奇校验/偶校验;串口选择:COM1/COM2;告警设置:是否告警、是否发音、告警的水平角度和俯仰角度差值,其取值与安装在云台上的天线方向图和波束角度相关,不能够超过天线波束的范围;速度控制:水平角度速度值、垂直角度速度值(需要云台支持)。
GPS信息接收模塊自动获取GPS接收机的本地位置信息,包括经度、纬度和高度,在没有GPS设备时,还需要支持人工输入模式;通过RS232接口连接GPS接收设备,自动获取本地的位置信息;或者通过人工输入模式,设置本地的位置信息,包括经度、纬度和高度的值。
信息处理显示模块包括对通过无线通信方式连接机载设备得到的机载设备位置信息的接收和显示,主要包括:经度、纬度、高度、艏向角、横滚角及飞行速度等。根据得到的机载设备位置信息,结合云台伺服智能控制系统所在的位置信息进行计算和统计,可以得到二者之间的距离、相对方位、俯仰角度。根据设置的告警范围,结合记忆的云台之前运转的相关位置及防绕线条件的限制值等,计算出水平方向的角度和俯仰方向的角度,以及需要云台转动的方向。同时在控制界面上实时显示云台转动的情况,新的天线方向图信息、范围信息,机载设备相关位置信息等内容,其中云台控制的天线范围可以设置和调整。
防绕线处理控制模块实现根据实时获取的机载设备位置信息和本地位置信息进行计算和统计,得到机载设备相对位置、云台需要的转动方向等信息;根据计算得到的水平角度和俯仰角度,调用通信控制模块,下发指令对云台实施控制,实时跟踪机载设备的方向。
伺服云台控制模块主要实现对伺服云台的水平方向转动控制、垂直方向转动控制,另外还可以增加一些快速定位功能,如初始位置设置、固定角度控制的功能,接收伺服云台返回的转动方向(需要有约定控制指令支持)、当前水平和垂直位置相关信息并发送给信息处理显示模块进行处理和显示等。
能够通过伺服云台智能控制,确保地面通信设备与机载通信设备之间保持最佳的相关位置,从而确保二者之间的良好通信,进而辅助实现地面设备对机载设备的控制和进行信息交互。
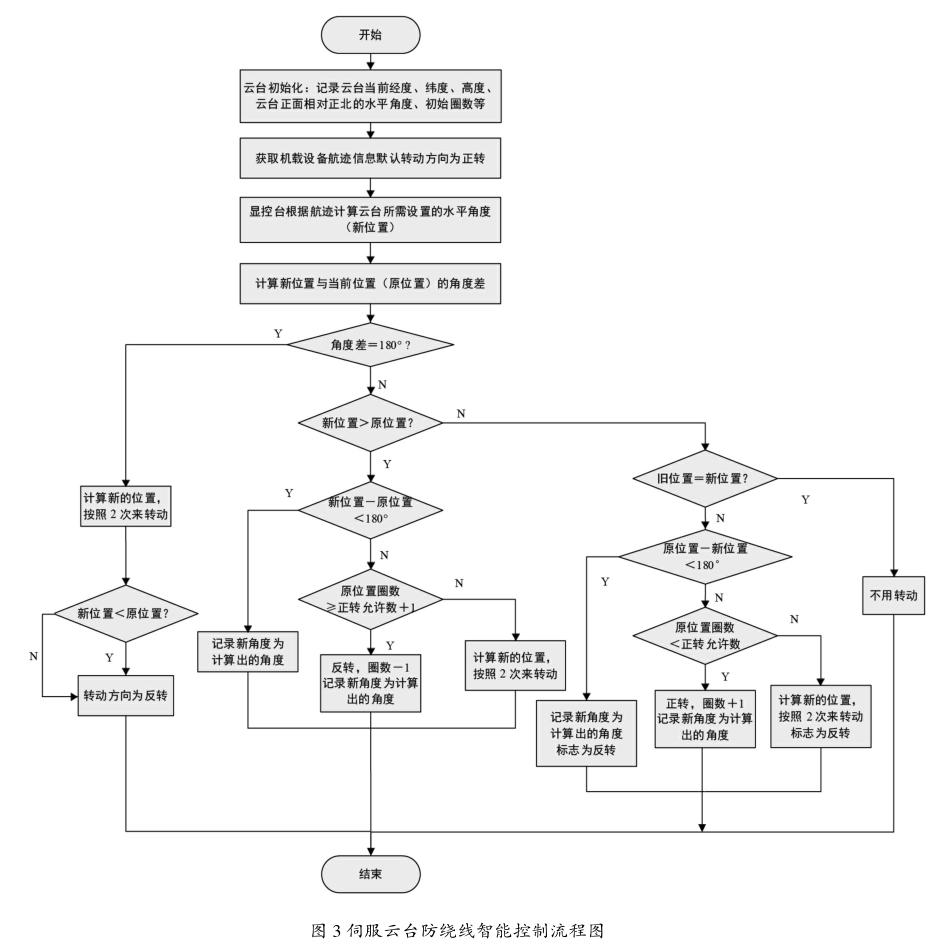
智能通信控制系统的软件操作控制界面设计实例如图4所示,实现了包括伺服云台智能通信控制的上述所有功能,支持地面设备对2个不同的机载设备的信息交互和通信控制。
图4还是一个平面的极坐标示意图。极坐标图的左上角显示名称,名称上面的指示灯表示显控台(计算机)与云台的连接状态,其中绿灯表示连接正常,不正常时指示灯为黑色。右上角显示的是云台控制的角度等信息,底部从左到右分别显示鼠标在极坐标图中移动时的位置、距离中心点距离、角度等信息,地面设备的经度、纬度、高度信息,2个机载设备的位置、高度、距离及角度等信息。
极坐标中心点指的是地面设备的位置,每个圈表示10 km的距离(具体距离可以通过配置进行调整)。黄色朝上的箭头表示车头的方向(云台初始位置的指向与其相同)。一周表示0°~360°的范围。N表示正北方向,E表示正东方向,S表示正南方向,W表示正西方向。为便于观察判断机载设备等目标方位,车头方向不变(以向上表示),方向图则根据车头与正北方向的夹角变化而变化。
在极坐标图下部左右两边,使用图形和数字方式对机载设备的俯仰角、横滚角进行了示意。图4中的蓝色区域是天线方向示意图。在高级功能中,操作员可以另外选择与通信天线相匹配的天线方向图。定向天线作用方向示意图还提供了三角扇形区域表示方法、椭圆区域、天线方向图区域表示方法等。

智能通信控制软件适用于地面设备的显控台使用,通过对伺服云台的控制,可以实现伺服云台上面装载的通信天线对准需要的方向,从而实现地面与空中目标之间的有效通信。本软件可以安装运行在任意一台能够运行Windows XP/Windows 7的计算机上。当需要对直连计算机的伺服云台进行控制时,需要该计算机带有一个RS232串口;当通过网络方式连接云台时,并且需要接收其他显控台的信息时,需要计算机提供网络接口。此外,本软件可以通过网络接收约定格式的飞机航迹数据,并自动计算飞机的相对位置、方向角、距离等,同时进行标绘,显示飞机相对于伺服云台的当前大致位置、飞行方向、俯仰角、横滚角等信息。操作员根据目标所处位置(方位),对伺服云台(上面安装通信天线)进行控制,从而确保地面站与飞机之间的稳定通信。
5结束语
本文提出了一种智能通信控制系统的设计方法,并给出了一种设计实例,同时介绍了应用场景。实际上,智能通信控制系统应用不仅仅局限于对机载设备通信配套。根据伺服云台上面安装设备的不同,可以实现不同的工作任务需求。本文通过在伺服云台上安装通信设备的定向通信天线实现了地面设备与机载设备之间远距离的通信功能,当在云台上安装摄录设备时,通过对云台的智能控制可以实现不同时间对不同方向目标的摄录;在云台上安装光电设备时,可以实现对不同方向目标的观察、探测等。本文提供的设计方法可以运用于车载设备、固定站设备等的智能通信控制系统设计参考,具有很强的实用价值,应用前景广阔。
参考文献
[1]栗苹,赵国庆,杨小牛,等.信息对抗技术[M].北京:清华大华出版社,2008.
[2]张筠莉,刘书智.Visual C++实践与提高—串口通信与工程应用篇[M].北京:中国铁道出版社,2005.
[3]严文.一种基于ARM的二自由度云台伺服控制系统研究[D].武汉:武汉科技大学,2012.
[4]于彦春.车载伺服升降云台系统研究[D].哈尔滨:哈尔滨工程大学,2011.
[5]罗伟,徐雪松,张煌军.多旋翼无人机目标跟踪系统设计[J].华东交通大学学报,2019,36(3):72-79.
[6]刘进进,吴辉,叶伟.基于摄像机云台控制系统的应用研究[J].工业控制计算机,2019,32(4):127-128.
