CT用于腹部放射治疗前等中心位置验证的临床应用
2020-04-01张爱华
张爱华 张 军 胡 健 戈 伟*
在腹部肿瘤的放射治疗中,容易受到腹式呼吸、腹部脂肪厚、皮肤松弛、胃肠蠕动及充盈程度不同等因素的影响[1]。为确保患者受照射时的实际中心位置与计划位置一致,放射治疗前进行等中心位置验证是最重要的一个环节[2]。临床常规对放射治疗位置验证行模拟机二维位置验证,或加速器在线锥形束计算机断层摄影(cone-beam computed tomography,CBCT)位置验证。现有的放射治疗模拟机使用频率过高导致经常出现设备故障,加速器自带的影像设备只能用于该加速器使用,而其他无自带影像设备的加速器无法使用。针对上述问题经过多年研发,本研究研发出一套CT模拟验证软件系统,作用于常规CT上,可以精确地为腹部患者进行放射治疗前等中心位置验证,以解决因放射治疗设备条件限制影响工作效率,使放射治疗前位置验证的重要环节顺利进行。
1 资料与方法
1.1 一般资料
选取2018年7-11月在武汉大学人民医院准备行放射治疗的50例腹部肿瘤患者,所有患者均采用真空负压气垫袋加碳纤维板底座固定,均采用CT靶区定位扫描,层厚为5 mm,用激光枪在患者体部做摆位坐标标记。图像数据传输至RTQA CT Simulator软件进行靶区勾画,然后由该系统传输至Varian加速器的Eclipse计划系统进行计划设计,待计划确认后将患者带至定位室对放射治疗计划行等中心位置验证后对所有患者再次进行加速器在线CBCT位置验证。
1.2 纳入与排除标准
(1)纳入标准:①经病理确诊为肿瘤需行腹部放射治疗;②意识清楚、听力、语言表达无障碍,了解自身病情;③自愿参加本研究并填写知情同意书。
(2)排除标准:①既往有心脑血管疾病、重要器官损害;②有严重并发症或精神障碍、感知障碍;③已参与其他研究。
1.3 仪器设备
自行设计研发的CT 模拟验证系统;RTQACT Simulator软件系统(上海康达医疗器械公司);Discovery CT 590 RT型CT机(美国GE公司),配备三维可移动激光灯系统,该CT所配带的软件无配准验证功能;加速器的Eclipse计划系统(美国Varian公司);体位固定装置(真空负压垫)及碳纤维底板(广州科莱瑞迪公司);Varian 23IX型直线加速器(美国Varian公司)。
1.4 位置验证方法
1.4.1 常规CT机等中心位置验证
(1)误差验证:使用模体进行系统误差的验证,在x(左右)、y(前后)和z(头脚)3个方向的系统误差分别均<1 mm。经Eclipse治疗计划系统做出患者的治疗计划,并确定靶区治疗坐标后将生成的RT文件传输至自行研发的RTQACTSimulator软件。
(2)患者体位:患者取仰卧于CT机床上,按照首次体位固定标准摆位到患者治疗点位置,按照激光灯在体表指示的3个位置分别贴上铅点,其中两个铅点在患者的水平X轴和上下Y轴上。行CT预扫描,在定位像中确定铅点的位置,以铅点所在的位置为中心前后3 cm设置层厚为1 mm,其他层厚为5 mm进行扫描,头脚方向的扫描总长为20 cm。
(3)图像获取:由RTQA CT Simulator软件获取验证CT的图像,并使用软件中的标定功能,找到铅点所在层面,其中患者左右两个点作为水平X轴上的点,上下方向的点为Y轴上的点,标定验证治疗中心的位置。
(4)图像配准:将验证CT图像和定位CT图像进行配准,其中配准分为手工配准和自动配准,配准无误后,RTQA CT Simulator软件以定位CT图像的坐标系为参考坐标系,计算出定位CT的计划拟定治疗中心和验证CT上标定的治疗中心的偏移量,该偏移量即复位等中心x(左右)、y(前后)和z(头脚)3个方向的误差量值。
1.4.2 直线加速器在线CBCT位置验证
(1)参考图像:采用定位CT图像作为3D-CBCT的参考图像,从瓦里安加速器网络系统(ARIA)数据库调用。图像采集:在千伏级能量源(kV-Source)处附加半滤线器,从182°逆时针旋转至178°(或反向),采集图像360°,千伏级探测板(V-detector)距离kVSource 150 cm,在水平方向移动4.8 cm,Reconstruction工作站重建生成三维CT图像直径为45 cm,z(头脚)方向16 cm的CBCT图像[3]。
(2)图像配准对比:采集CBCT图像后,在3个方向对应的横断面、冠状面和矢状面分别采用骨性配准、灰度值配准和手动配准3种配准方式分别与参考图像进行配准对比,两者产生的差值为x(左右)、y(前后)和z(头脚)3个方向的比较[4]。3个方向上的误差分别记录为Ex、Ey、Ez,根据参考中山大学附属肿瘤医院制定的质量控制标准(腹部误差以±5 mm作为位置验证合格标准),任一方向上误差在±3~±5 mm时需进行修正,当误差>±5 mm时,要求对患者进行重新摆位重新校对。
1.5 统计学方法
采用SPSS19.0统计软件对数据进行处理,计数资料采用例数和百分比表示;数据呈非正态分布,等级资料比较采用秩和检验;计量资料用均数±标准差()表示,采用配对t检验。以P<0.05为差异有统计学意义。
2 结果
2.1 两种验证模式采集图像辨识度
CBCT拍摄的图像在右侧胃旁有明显的条纹干扰,导致图像不清晰,这是因为空腔更容易受到不均匀性的影响,而导致逆向成像有条纹干扰,而常规CT则无明显该条纹干扰;CBCT的图像由于对比度差,而导致正常器官以及肿瘤组织很难辨识,而在常规CT图像中可以很容易识别出正常器官以及肿瘤组织,见图1。
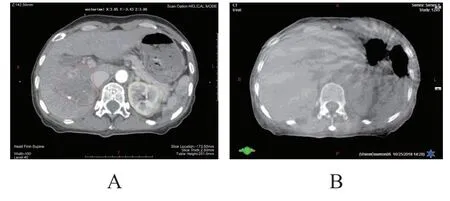
图1 两种验证模式的采集图像
2.2 两种位置验证模式误差结果
分别记录并统计常规CT等中心位置验证和加速器在线CBCT位置验证在x(左右)、y(前后)和z(头脚)3个方向的平移误差,并将误差分为3个等级范围Ea≤±3 mm,±3 mm<Eb≤±5 mm,Ec>±5 mm。①常规CT等中心定量分析位置验证时x方向上各误差等级范围例数依次为Ea12例(24%)、Eb34例(68%)和EC4例(8%),y(前后)方向上为Ea9例(18%)、Eb35例(70%)和Ec6例(12%),z(头脚)方向上为Ea28例 (56%)、Eb18例(36%)和Ec4例(8%);②加速器在线CBCT位置验证时x(左右)方向为Ea11例(22%)、Eb28例(56%)和Ec11例(22%),y(前后)方向上为Ea8例(16%)、Eb29例(58%)和Ec13例(26%),z(头脚)方向上为Ea22例(44%)、Eb18例(36%)和Ec10例(20%)。
2.3 两种位置验证平移误差等级比较
在误差等级中,常规CT等中心位置验证误差等级Ea为49例,Eb为87例,Ec为14例;加速器在线CBCT位置验证Ea为41例,Eb为75例,Ec为34例;常规CT等中心位置验证误差等级在Ea和Eb上的例数多于加速器在线CBCT位置验证误差等级上的例数;在Ec上常规CT等中心位置验证误差等级例数比加速器CBCT验证误差等级例数少。表明常规CT等中心位置验证误差量值小于加速器在线CBCT位置验证,经统计学Z检验,差异有统计学意义(Z=-2.296,P<0.05),见表1。

表1 两种验证方式3个方向平移误差等级比较(例)
2.4 两种位置验证平移误差比较
两种验证方法x(左右)、y(前后)和z(头脚)3个方向上的平移误差EX、EY和EZ比较,差异均有统计学意义(t=-5.623,t=-5.371,t=-6.342;P<0.05),见表2。
表2 两种位置验证方式不同方向平移误差比较(mm,)

表2 两种位置验证方式不同方向平移误差比较(mm,)
注:表中Ex为左右方向误差;Ey为前后方向误差;Ez为头脚方向误差
3 讨论
腹部患者放射治疗,由于受腹式呼吸和胃肠充盈不同程度的影响,为提高临床受照靶区剂量,避免正常组织和危及器官受照,对摆位的精度提出了很高的要求,为确保放射治疗质量及安全,在首次治疗前均进行位置验证[5-8]。临床上一般采用模拟机行二维位置验证,或者在直线加速器上进行在线CBCT位置验证,二维模拟机验证由于是X射线摄片胶片成像,采用0°和90°的角度采集获取相关正侧位影像并和数字化重建影像(digitally reconstructed radiography,DRR)进行比对,用骨性标记作为参考点,故其清晰度和位置精度欠佳[9]。在线行CBCT位置验证.每位患者从体位摆放完毕,到CBCT图像采集,再到位置配准,这一系列环节需耗费加速器大量时间,而放射治疗患者日益增多,导致放射治疗设备满足不了现有诊疗需求,使在线CBCT位置验证技术在实际应用中的使用并不理想,且未带图像引导放射治疗(image guided radiation therapy,IGRT)的加速器无法使用。本研究将自行研发CT模拟验证系统运用于常规CT上,有效地解决二维模拟机验证和在线加速器CBCT验证存在的弊端。该系统可将放射治疗的图像存储、发送和图像融合配准,靶区勾画,驱动激光灯指示复位中心,将计划等中心和复位等中心进行比对,进而测算出误差量值,完成位置验证。本研究结果显示,运用CT模拟验证系统将常规CT用于腹部放射治疗等中心位置验证和直线加速器在线CBCT位置验证,平移误差在x(左右)、y(前后)和z(头脚)3个方向上,误差等级分级比较,常规CT位置验证优于CBCT位置验证,差异有统计学意义。常规CT用于腹部放射治疗等中心定量分析位置验证的图像清晰度和辨识度比加速器在线CBCT位置验证的图像清晰度和辨识度要高。这是由于运用CT模拟验证系统将常规CT用于腹部放射治疗等中心位置验证,是360°获取图像采集,且在横断面进行显像,是对患者扫描图像的还原,更直观的提供了中心层面的高密度分辨率图像,不仅骨性标记点被清晰标志出,其腹部肿瘤周围的软组织、肿瘤组织也显示的比较清晰[10]。现阶段,对于多层螺旋CT技术而言,其探测仪器的主要材料为稀土陶瓷,这一材料具有输出率较高,以及稳定性较好等特点。常规CT机的控测器高达300~800个并与相对的X射线管只做旋转运动,因此能收集较多数据,扫描时间为5 s以内,使伪影大幅减少,图像质量提高,故提高了图像配准的清晰度[11]。常规CT机借助CT模拟验证系统作为技术支持,采用移动激光系统机器控制且显示精度为0.1 mm,故可以提高三维方向上平均精度[12]。CBCT是一种计算机断层成像技术,使用圆锥形光束对被检体进行360°旋转扫描,用锥束CT重建算法对获得的二维图像进行重建,从而获得三维立体的放射图像[13]。由于锥形束CT系统硬件加工工艺限制,导致的各探测元单元灵敏度和效率不一致,单个探测元损坏以及一些不可控的原因,CBCT图像中往往会出现与被扫描组织结构无关且均以重建中心为圆心,灰度值不同于周围像素的一系列伪影。伪影的出现大福降低了CBCT图像的质量与真实性,对于腹部低密度的软组织而言影响更大[14-15]。导致相对于常规CT成像清晰度差,并导致精度有所降低。
4 结论
本研究表明,利用研发软件将常规CT运用于腹部放射治疗等中心位置验证,因其具有成像清晰度高且可以精准配准等优点,既保障了腹部放射治疗质量安全,又提高了常规CT机的使用率,使得医疗资源应用最大化,具有重要的临床应用价值。
由于位移误差由x(左右)、y(前后)和z(头脚)3个方向上的平移误差和绕此3个方向的旋转误差组成,由于加速器治疗床只能沿着x(左右)方向旋转,其他的两个方向不能旋转,故本次研究未对腹部放射治疗患者做绕此3个方向上的旋转误差做统计,是本研究的欠缺之处。为此,本研究将改进软件设计,使其具备对3个方向旋转误差的分析功能,再做进一步的研究,以完善该欠缺。
