聊聊动态塑性和黏塑性*
2020-04-01王礼立董新龙
王礼立,董新龙
(宁波大学冲击与安全工程教育部重点实验室,浙江 宁波 315211)
在爆炸/冲击载荷下,材料本构关系通常分解为球量部分(容变律)和偏量部分(畸变律)分别加以处理。前者归结为高压下不同形式状态方程(非线性弹性律)的研究,而后者则归结为率相关剪切律的研究[1- 2]。
就偏量部分而言,当涉及结构和材料的动态塑性时,出现一个基本概念性问题:到底应该使用术语“塑性变形”(plastic deformation)还是“塑性流动”(plastic flow)来表示?这其实涉及到对材料塑性本构关系基本类型的认识。
变形和流动的差别主要在哪儿呢?这可以从材料本构关系角度来讨论。
在固体力学中,人们讨论应力作用下的变形,其偏量本构关系表现为应力与应变之间的函数关系,例如图1(a)所示的Hooke 弹性定律:

应力与应变一一对应,不随时间变化。
在流体力学中,人们讨论应力作用下的流动,其偏量本构关系表现为应力与应变率之间的函数关系,例如图1(b)所示的Newton 黏性定律:

应力与应变率一一对应;而应变 γ 则随时间变化,是通过 γ ˙(t) 对时间t 积分确定的。如果想在应力-应变坐标中刻画Newton 黏性定律,则如图1(c)所示,表现为恒应变率下给定应力下的一条水平线,这条水平线隐含着应变在给定应力和应变率下随时间增长的过程。
固体力学的学者从应力-应变型本构关系出发,习惯于用应力-应变坐标来表述材料受应力作用时的变形;但当材料进入到遵循应力-应变率型本构关系的塑性流动(下文将详细讨论)时,如果还继续用应力-应变坐标来表述材料的塑性流动,就将在到达屈服点后出现类似于图1(c)那样的所谓“理想塑性”平台。

图 1 (a) 在τ-γ 坐标中表示的Hooke 弹性定律(τ=Gγ);(b)在 坐标中表示的Newton 黏性定律(τ=η γ˙ );(c) 在τ-γ 坐标中表示的Newton 黏性定律(τ=η γ˙ )Fig. 1 (a) The Hooke's elastic law (τ=Gγ) described in τ-γ coordinates; (b) The Newton's viscous law (τ=η γ˙ ) described in coordinates; (c) The Newton's viscous law (τ=η γ˙ ) described in τ-γ coordinates
其实,力学的主要二级分支学科,如一般力学(刚体系力学)、固体力学及流体力学等的划分,正是基于不同的材料偏量本构关系类型进行区分的:一般力学研究的是不会变形不会流动的刚体,固体力学研究的是具有应力-应变本构关系(以下简称为形变型本构关系)的变形体,而流体力学研究的是具有应力-应变率本构关系(以下简称为流动型本构关系)的流动体。这些都是理想化模型。
对于实际材料,常常需要处理更复杂的、变形与流动相耦合的情况。按照流变学(rheology)的观点,万物皆变,万物皆流,变形与流动共存。弹塑性本构模型正是弹性变形与塑性流动的耦合模型。朱兆祥先生曾经回忆当年在深圳罗湖桥接待钱学森先生回国时,看到钱学森先生在入关填写表格时,在填写“专业”一栏写过一项“流变学”,这在当时是跨固体-流体、跨力学-材料学的前沿学科。
那么塑性是像弹性固体那样遵循形变型本构关系(塑性应力-应变关系),还是像黏性流体那样遵循流动型本构关系(黏塑性应力-应变率本构关系)呢?下面,我们将从宏观塑性本构理论和微观位错动力学理论角度分别加以讨论。
1 从宏观塑性本构理论的角度来看
由经典塑性力学的发展史知[3-4],塑性增量理论先于全量理论。从本构关系类型的角度看,前者属于流动型本构关系,而后者则属于形变型本构关系,实际上是前者在简单加载(比例加载)条件下的特殊情况。
从塑性增量理论出发,按照Levy(1871)-Mises(1913)最早提出的塑性增量理论,塑性应变偏量增量正 比 于应力偏量 Sij:

式中: dλ 是非负标量比例因子。式(3a)两侧同除以dt 后,可改写为以应变率表征的形式:

有时称为St. Venant-Levy-Mises 方程。更一般的Prandtl-Reuss 理论则进一步考虑了耦合的弹性变形。显然,当1 /λ˙=η=const. 时,式(3b) 就化为Newton 黏性律,因而Levy-Mises 增量理论(式(3))可看作Newton 黏性律的非线性推广。

把式(3c)等号两侧平方,演算时注意到等效应力 σeあ和等效塑性应变率的如下定义:

即可确定:

把式(5)代回式(3c),可得到以应变率形式表述的如下流动型本构关系:

例如,把忽略弹性应变率并以等效应变率形式表示的Cowper-Symonds 公式:

将式(7)代入式(6)可得:

式中: σ0为准静态流动应力,D 和q 为材料常数。这就是张量形式的基于Cowper-Symonds 公式的应变率相关的流动型黏塑性本构方程。
注意,式(3)~式(6)并不依赖于是否存在屈服面或静态应力-应变曲线,既适用于无屈服面黏塑性理论,如Bodner-Parton 的无屈服面模型;也适用于含屈服面或静态应力-应变曲线理论,例如基于Cowper-Symonds 公式(式(7))的式(8)以存在屈服面或静态应力-应变曲线为前提,是所谓超应力类型的黏塑性本构方程。
2 从微观位错动力学的角度来看
塑性微观机理的研究曾经经历过从“理想晶体整体滑移”机理到“实际晶体位错运动”机理的发展过程。由下面的讨论可知,这两种机理实际上分别对应于形变型塑性本构方程和流动型黏塑性本构方程。
2.1 “理想晶体整体滑移”机理
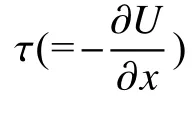

式中:2A 为振幅。则对应的剪切应力τ 为:


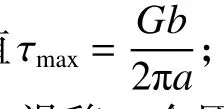
图 2 理想晶体的剪切滑移Fig. 2 Shear slip in a perfect crystal
因此,能使上排原子相对于下排原子产生整体塑性滑移所需的最大剪切应力 τb表征了理想晶体的所谓理论剪切强度(理论屈服强度),一般b 和a 为同一量级的量,因而近似地有:

这一机理给出了如下的弹塑性本构关系:

式中:应变γ 的下标e 和p 分别指弹性和塑性。由此可见,式(11)属于应力-应变一一对应的形变型本构关系。
但是,式(10)给出的理论屈服强度与实际金属晶体的实测屈服强度值相对比,有量级性的差别(两者之比达102~104量级)。这归因于实际晶体存在内在缺陷。1934 年,Orowan[5]、Polanyi[6]和Taylor[7]几乎同时、又分别独立地,提出了位错的概念,并为随后的实验观察所证实。
2.2 “实际晶体位错运动”机理
含位错的实际晶体,在切应力τ 作用下,通过位错在晶体中的一步步运动来完成滑移,如图3 所示。
关于这一位错运动机理,有两点特别值得强调:(1)由于位错的局域化作用,使得推动位错一步步移动所需的切应力(实际屈服强度)远比推动晶体整体滑移所需的切应力(理论屈服强度)小得多,这是含缺陷的实际晶体与完善的理想晶体强度有量级性差别的根本原因。(2)在“理想晶体整体滑移”机理中,一旦外加切应力达到晶体理论屈服强度就可瞬时滑移以实现塑性形变。与之相反,在位错运动机理中,滑移是通过位错一步步移动的时间相关过程来实现的,因而是一个与时间相关的、即与位错运动速度vd相关的塑性流动过程。
图 3 由位错运动形成的滑移。Fig. 3 Slip formations due to dislocation movement.
考察在给定的宏观大小为l×l×l 的晶体,在微观尺度上有N 个平行的可动刃型位错,在切应力τ 作用下,位错以某一速度移动,如图4 所示。
Orowan[8]提出联系微观位错运动与宏观塑性畸变γp的如下方程:
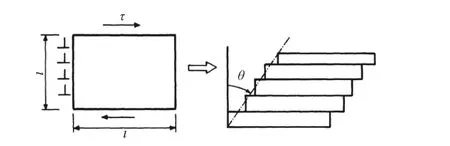
图 4 一列平行位错的运动造成的宏观塑性切应变Fig. 4 The macroscopic plastic shear strain γ p(=tanθ) caused by the motion of a row of parallel dislocations

在位错运动机理中,位错运动速度vd(=dl/dt)扮演决定性作用,式(12a)对时间t 微分后有:

式中:φ 为位相因数,ρm(=N/l2)为可动位错密度,b 为位错的Burgers 矢量大小。当可动位错密度对时间的变化率是可忽略的小量时,则近似地有如下的Orowan 简化式:

Orowan 公式(式(12))的重要意义在于:它建立了微观位错运动诸参量与宏观塑性畸变率的联系,这是跨尺度研究能否实现宏观工程应用的关键所在。
Orowan 公式中的关键性微观参量是位错运动速度vd,实验表明它依赖于作用力τ 和温度T。vd实际上反映了位错跨越短程势垒实现塑性滑移的成功概率。位错跨越各种短程势垒一方面靠外力τ 做功,另一方面靠晶格热振动(热起伏)的热激活能U。由此,按照统计力学有关热激活过程的分析可得:

式中:v0为位错振动频率f0与位错平均运动距离χ 之乘积,k 为Boltzmann 常数。式(13)是位错速度vd的Arrhenius 方程,把它代入Orowan 简化式(式(12c)),就得到塑性应变率的Arrhenius 方程:

式(14a)是基于位错动力学热激活机制的流动型塑性本构关系的一般形式。就本构关系类型而言,与宏观塑性增量理论是一致的,为塑性增量理论提供了微观物理机制。至于其具体形式,则取决于热激活能U 如何依赖于作用力τ 的函数形式U(τ)。
引入以下无量纲参数:

式中:τc为特征应力,V(=blx)为激活体积, V*为τ=0 时的激活体积。
则式(14a)可改写为如下无量纲形式:

注意,按激活能的定义有:

显然,黏塑性本构关系的具体形式取决于U(τ)或V(τ),这是一切基于位错动力学的黏塑性本构关系研究的核心所在。
例如,按照Seeger 的林位错模型,U(τ)可近似地表为τ 的线性函数(对应于 τ - V 坐标中的矩形势垒曲线,如图5(a)所示),则在半对数坐标中显示为一直线,τ 随的量级性增加而升高:

式中:c 为表征材料的应变率敏感性的材料参数。
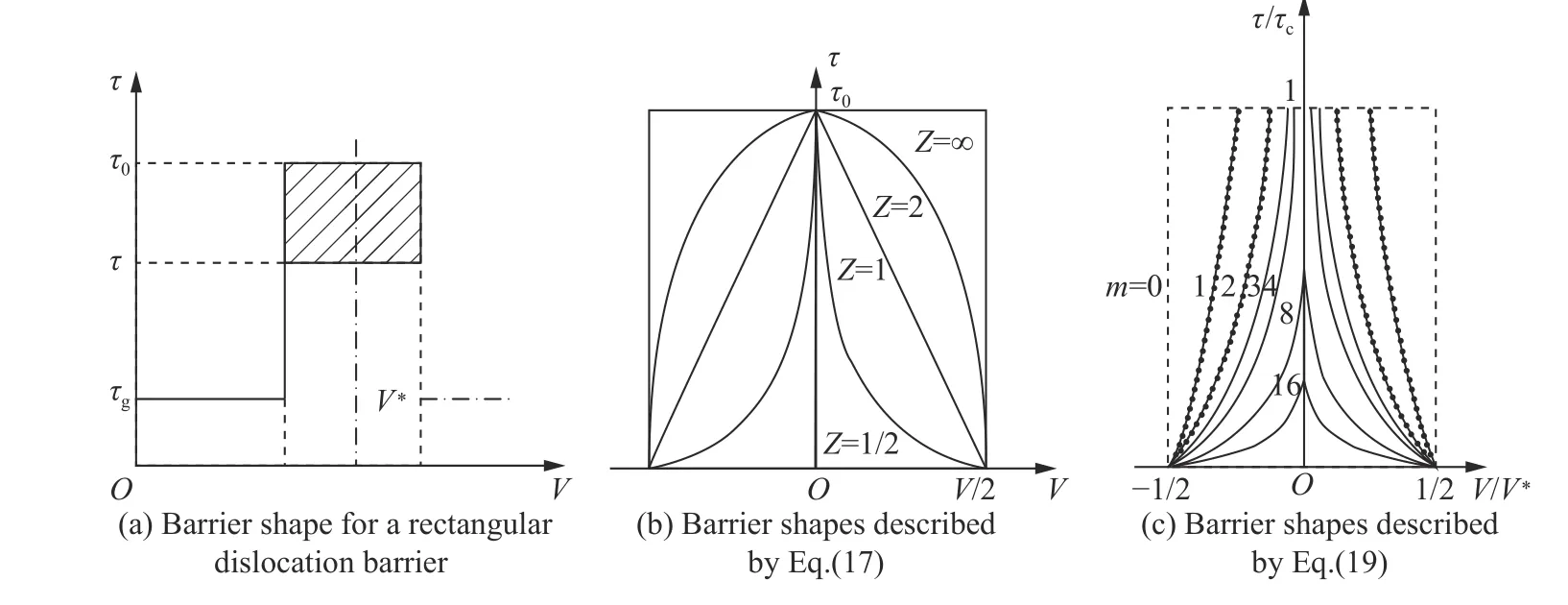
图 5 位错势垒示意图Fig. 5 Schematics of dislocation barrier
联系到人们熟知的Johnson-Cook 方程:


此式与Seeger 模型(式(15))一致,只是做了存在准静态应力-应变关系σs(ε)的假设,以它代替了式(15)的τ0,并相应地引入了无量纲超应力(σ-σs(ε))/σs(ε)。
关于U(τ),除了Seeger 线性模型外,研究者们还建议了众多的非线性关系式,其中具有代表性的如下。
(1)Davidson-Lindholm 模型[9],由下式表示:

式中:Z 为材料参数,当Z 取不同值时,就对应于不同的势垒形状,如图5(b)所示。当Z =∞时,=1 ,就化为Seeger 模型。
(2)Kocks-Argon-Ashby 模型[10],如下式所示:

式中:U0(=τcV*)为应力为零时的激活能。此式由于包含p 和q 两个参数(0 <p≤1 ,1 ≤q≤2 ),显然比Davidson-Lindholm 模型(式17)更为一般化。
(3)Wang 双曲型势垒谱模型[11],如式(19)和图5(c)所示:


此处应变率权重函数 ψi一般是、和T 的函数,并满足:

至此,式(14)至式(19)都是基于Orowan 简化式(式(12c))展开分析的,忽略了可动位错密度对时间的变化率的影响,从而在实质上忽略了以位错增殖机理为基础的应变硬化效应。
Zerilli 等[12]考虑了应变硬化效应,并且注意到不同晶格结构的应变率敏感性是不同的,对于体心立方晶格(BCC)和面心立方晶格(FCC)分别提出以下本构关系:

被称为Zerilli-Armstrong 方程,式中还增加了长程非热应力σg项(第1 项)和考虑了晶粒尺寸d 对于流动应力的影响(最末项),C1、C2、C3、C4和k 均为材料参数。
在以上讨论中,在没有热激活的帮助时,位错为跨过势垒所必需的力学阈值应力(mechanical threshold stress)τ0,已假定是恒值(参看图5 中的势垒峰值应力τ0)。实际上,一旦微结构发生演化,τ0也随之变化,在宏观上表现为应变率历史效应。对此,Follansbee 等采用Kocks-Argon-Ashby 的非线性模型(式(18)),但把τ0看作应变和应变率的函数,则式(18)当以正应力来表示时,可写成如下无量纲形式[13]:

式中: g0=U0/(G(T)b3)
为无量纲归一化激活能,G(T)为弹性剪切模量,一般是温度T 的函数。式(21)称为力学阈值应力模型。下一步的关键和难点在于如何确定力学阈值应力演化关系 σ0=σ0(ε,ε˙) ,通常依靠一系列包含不同应变/应变率历史的“动态预加载-卸载-再加载”实验来确定。
有关U(τ)非线性关系式的更详细讨论,可参考文献[1-2]的第6 章。由上述讨论可知,不论U(τ)取什么形式,其实都是式(14)的具体表现,都属于流动型黏塑性本构关系。
3 讨 论
由以上从宏观塑性本构理论和微观位错动力学机理两个角度分别对于“塑性”的讨论,一致地表明,所谓“塑性”本质上是速率/时间相关的黏塑性流动,塑性本构关系属于率相关流动型黏塑性本构关系。这一关系同时适用于加载和卸载。
对于流动型本构关系,理应在应力-应变率坐标中讨论,而难以用应力-应变图来描述,除非在给定应变率下,表现为一系列不同应变率下的不同的应力-应变曲线。即使这样,这些所谓的应力-应变曲线其实隐含着应变在给定应力和应变率下随时间增长的过程,不同于形变型本构关系的应力-应变曲线。
不难理解,对于那些习惯于准静态的应力-应变分析(不包含应力波传播的时间效应),以及习惯于在应力-应变坐标中讨论形变型本构关系的研究者,如果继续在应力-应变坐标中讨论本应以应力-应变率所表征的流动型塑性本构关系,难免会遇到各种困扰,以致模糊了黏塑性流动律本身的特征和表现。
特别在弹性形变律与塑性流动律相耦合的弹-黏塑性情况下,尤其需要注意区分形变律与流动律。在主应力(σ,σ2,σ3)空间,如图6 所示[14],如果加载和卸载路径都落在Mises 屈服圆柱以内,则服从弹性形变律。如果加载路径落在Mises 屈服圆柱以外、刘氏断裂钟以内,则塑性流动遵循黏塑性流动律(式(6)、式(14)),与之相耦合的弹性变形则继续遵循弹性形变律;一旦卸载,黏塑性流动部分将遵循同一黏塑性流动律(式(6)、式(14))卸载,与之相耦合的弹性变形则遵循同一弹性形变律卸载。这时,对于给定的应力加载历史σeff(t),由塑性流动律可以确定对应的塑性应变率历史,从而进一步通过时间积分可确定相应的塑性应变响应。不过要注意,当应力卸载时,对应的塑性应变率当然也跟着降低,但积分所得的塑性应变εeff(t)并不立即减小而会随时间继续增加,直到卸载应力落到和落在Mises 屈服圆柱以内,塑性流动停止,只剩下弹性卸载;因而实际上并不存在本构关系意义上的塑性应力-应变关系,也不存在基于塑性形变理论假设所提出的所谓“后继屈服面”和“塑性变形的弹性卸载”,等等。现有塑性力学教材的部分相关内容是否应作相应修改,无疑给我们提出了一个挑战。
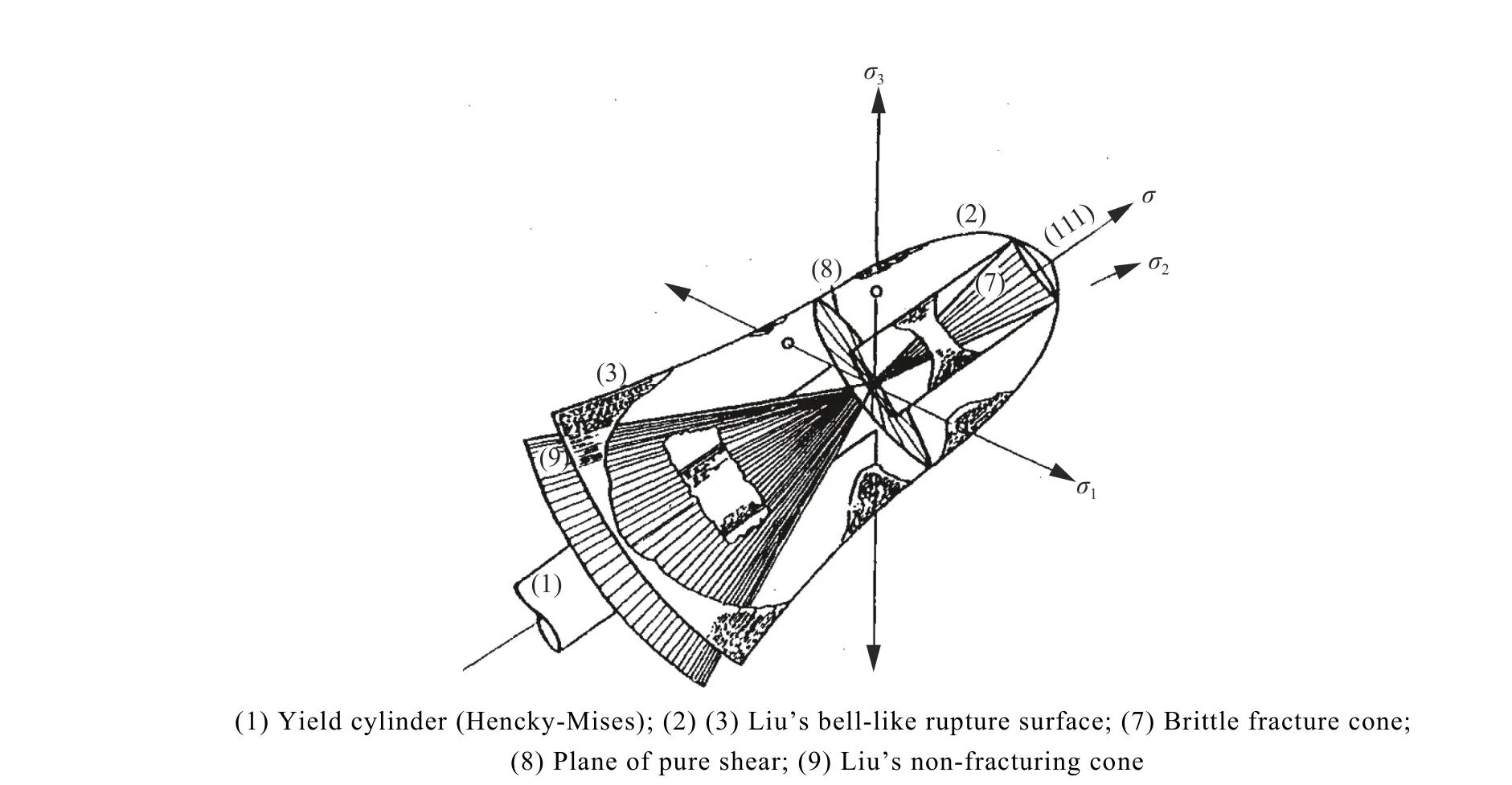
图 6 应力空间中的Mises 屈服圆柱和刘氏断裂钟面[14]Fig. 6 Mises yielding cylinder and Liu's bell-like fracture surface in principal stress space[14]
在爆炸/冲击的高应变率载荷下,结构动态响应问题常常归结为应力波的传播和相互作用。一旦涉及动态塑性(黏塑性)时,问题就归结为基于形变型弹性本构关系的弹性波与基于流动型本构关系的黏塑性波耦合传播和相互作用的问题。一旦包含加载过程与卸载过程及其相互作用,问题变得益发复杂化,值得今后视具体研究情况作进一步探讨。
