某船舶电站监控程序设计存在的问题与改进措施
2020-03-31覃登罗樊斌闫鹤翔
覃登罗 樊斌 闫鹤翔
摘 要:本文分析了某船舶电站监控程序存在的数据采集不同步、不可控以及过载保护不可靠等设计缺陷,通过调整数据采集顺序,采用时钟事件触发方式代替时钟上升沿触发方式对程序进行改进,消除了这些缺陷。
关键词:船舶电站; 监控程序; 缺陷; 改进
中图分类号:TM769 文献标识码:A
Abstract: This paper analyses the principle and damage of the design defects of a ship power station monitoring program, such as unsynchronized data acquisition, uncontrollable data acquisition and unreliable overload protection, improves the program by adjusting the sequence of data acquisition and using clock event trigger mode instead of clock rising edge trigger mode, to eliminate these defects and explain the abnormal phenomenon and the reason of a generator fault.
Key words: Ship Power Station; Monitoring program; Defects; Improvement
1 前言
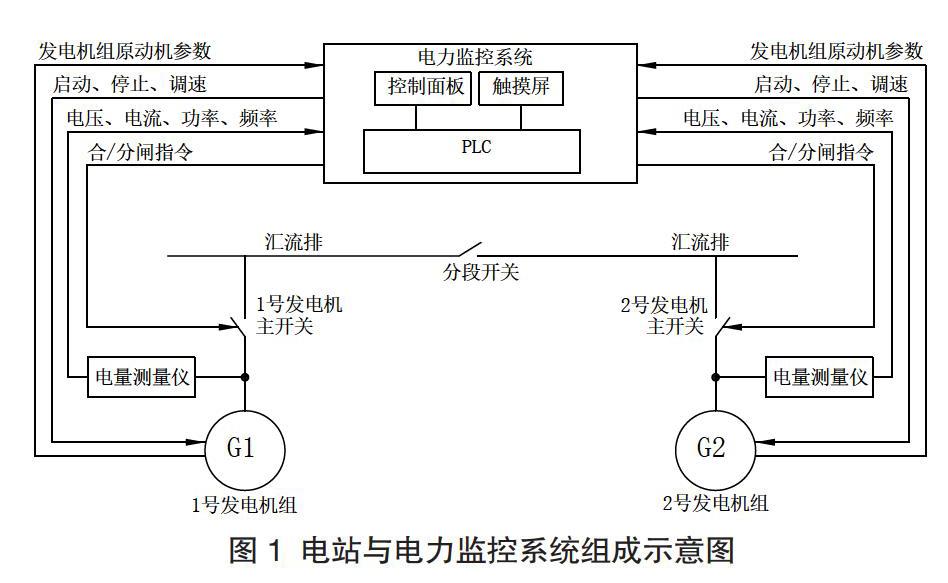
某船舶电站由两台额定功率为PN的发电机组成,通过电力监控系统实施远程监控,如图1所示。在正常情况下两机并联工作时,电力监控系统显示的两机功率值会有所波动,但由于波动不大未引起注意。某次由兩台发电机并联供电电网负载总功率约0.8 PN ,当接入本船最大负载(功率为0.6 PN)时,2号、1号发电机主开关先后自动断开,且1号发电机发生严重故障保护停机(原动机与减速器之间的弹性轴断裂),电力监控系统触摸屏上短时间同时显示两台发电机功率大于1.25,超出了发电机的过载能力[1]。经过仔细检查与分析,发现监控系统PLC控制程序存在比较严重的设计缺陷,并提出了改进措施,排除了未知负载接入、短路、逆功以及电路故障的可能性[2]。
2 电力监控系统监控原理
电力监控系统通过PLC对发电机有功功率进行监控,监控程序伪代码如下:
(1)读取时基为10 ms的时钟状态;
(2)如果时钟状态从0变为1,则捕捉到时钟上升沿,计数tik增加1;
(3)如果tik>15,则tik=0;
(4)如果tik=5,则采集2号发电机功率P2;
(5)如果tik=10,则采集1号发电机功率P1;
(6)如果tik=15,则采集岸电功率PB;
(7)如果P1>1、10持续8 s,则卸掉1号发电机次要负载,并发出1号发电机次要负载断开报警;
(8)如果P1>1、25持续1 s,则断开1号发电机主开关,并发出1号发电机有功功率>125%报警;
(9)如果P1>1、29,则断开1号发电机主开关,并发出1号发电机有功功率>125%报警;
(10)如果P2>1、10持续8 s,则卸掉2号发电机次要负载,并发出2号发电机次要负载断开报警;
(11)如果P2>1、25持续1 s,则断开2号发电机主开关,并发出2号发电机有功功率>125%报警;
(12)如果P2>1、29,则断开2号发电机主开关,并发出2号发电机有功功率>125%报警。
该监控程序的功能是对发电机功率采集和功率过载保护,其原理是:
语句1~3,通过判断相邻两个扫描周期的时钟状态从0变为1来捕捉时钟上升沿,对上升沿计数,每16个上升沿为一个周期;
语句4~6,当时钟上升沿计数等于5、10、15时,分别采集2号发电机、1号发电机和岸电的功率;
语句7~12,根据预定规则对发电机进行超负荷保护并发出相应报警信号。
3 监控程序设计存在的问题分析
电站监控系统存在数据采集不同步、不可控及过载保护不可靠的缺陷,这些缺陷在正常情况下不易发现;但当并联发电机功率分配波动时,这些缺陷便显露出来,而且波动越大越明显,可能会造成误动作或失控而产生严重后果。
3.1 数据采集不同步
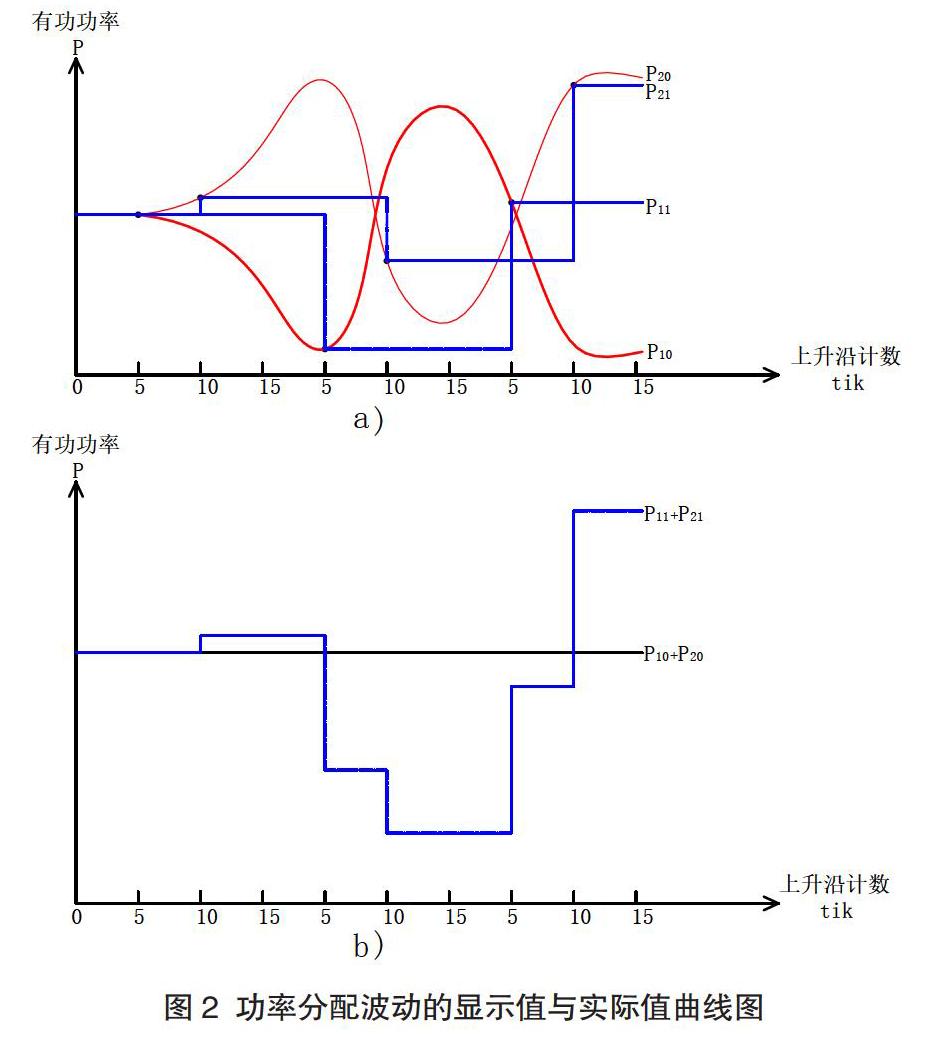
由于监控程序对1、2号发电机功率的采集不同时进行,在双机并联工作时,监控系统无法正确测量电网负载的功率值:设电网负载总功率为P,1、2号发电机的实际功率值为P10、P20,则P10+P20 =P;监控系统测量到的两机功率为P11、P21,由于P11和P21不是同一时刻的值,其值范围分别是0≤P11≤P、0≤P21≤P,两值之和的范围是0≤P11+P21≤2P,即从监控系统中两发电机功率之和为0~2P之间的任意值;当电网负载总功率不变而两发电机有功功率分配波动时,P10、P20、P11、P21可能的变化曲线如图2 a )所示,P10+P20和P11+P21变化曲线如图2 b )所示。
在两机功率分配有波动时,数据采集不同步导致监控系统无法得到电网负载功率的实际值,其控制将变得混乱。
3.2 數据采集不可控
监控程序通过捕捉时钟上升沿来触发数据采集动作,实际运行时程序并不能捕捉到所有的时钟上升沿,导致数据采集时机存在不确定性,因而是不可控的。
以时钟周期=10 ms及PLC扫描周期=12 ms为例:在PLC扫描周期R1~R12内捕捉到时钟T1、T7两个周期的上升沿,而其它10个时钟周期的上升沿丢失,其规律为每10个扫描周期重复出现,因此上升沿捕捉率为2/12=17%;当扫描周期为10 ms时(时钟半周期的偶数倍),捕捉不到上升沿,此时上升沿捕捉率为0;当扫描周期为15 ms时(时钟半周期的奇数倍),上升沿捕捉率为50%;当扫描周期在时钟半周期以内时,上升沿捕捉率达到100%。
实际上,PLC的扫描周期是不固定的。如果设定了扫描周期,当PLC实际扫描周期小于设定扫描周期时,PLC会等待到设定时间后再进行下一个扫描周期;而当PLC实际扫描周期大于设定扫描周期时,则以实际扫描周期为准;而且在一个扫描周期内,时钟状态也可能发生变化,在不同时刻读取到的时钟状态也可能不同,当扫描周期为半时钟周期的偶数倍时,上升沿捕捉率可能会很低,但为0的情况几乎不会发生。
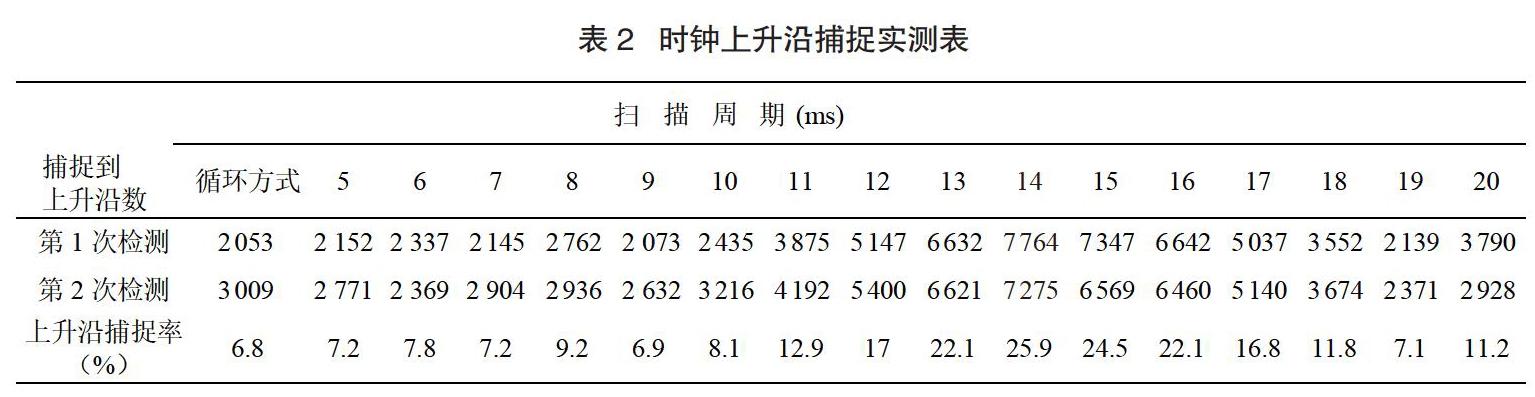
根据对PLC进行实际测量的数据:在5分钟内,按循环方式和设定不同的扫描周期,记录捕捉到的时基10 ms时钟上升沿数量,得到表2的数据。从表2可以看出,扫描周期为12 ms时,时钟上升沿捕捉率为17%。
测试说明:①每种方式检测时间为5分钟,实际产生时钟上升沿为30 000个;②当设置的扫描周期小于实际扫描周期时,按实际的扫描周期执行;当设置的扫描周期大于实际扫描周期时,扫描完成后延时到设定时间再继续下一个扫描周期;③ 实际扫描周期不固定,一般在8~12 ms之间,最小为6 ms,最大为17 ms;④ PLC实际完成一个周期比设定扫描周期多1 ms,即如果设定扫描周期为T,实际执行需T+1 ms。
根据采样定理,要想捕捉到所有的时钟上升沿,PLC扫描周期不能大于时钟周期的一半。本程序中时钟周期为10 ms,要求PLC扫描周期不大于5 ms,但本电力监控系统中PLC的扫描周期为8~12 ms,因此必然存在上升沿丢失的情况,而且扫描周期越接近时钟周期的整数倍,上升沿捕捉率越低。
3.3 过载保护不可靠
由于监控系统采集到的发电机功率之和不等于电网负载功率实际值,其数据是不可靠的,而使用不可靠的数据作为依据进行控制是不可靠的。
电力监控系统为离散系统,每次采集的数据将保持一个采集周期。程序中设计的一个数据采集周期为捕捉到16个周期为10 ms的时钟上升沿的时间,理论上应为16*10=160 ms,由于存在上升沿丢失现象且丢失率不确定,因而数据采集周期也不确定,可能远大于160 ms。因此过载保护中的过载持续时间是无法确定的,理论上过载持续1 s断开发电机主开关,实际上过载只持续0.1 s就有可能断开发电机主开关[3]。
4 监控程序设计改进
将原监控程序的语句1~6修改为以下4句,并由10 ms时钟事件触发:
(1)tik增加1;
(2)如果tik大于10,则tik=1;
(3)如果tik=5,则采集2号发电机功率P2 和1号发电机功率P1;
(4)如果tik=10,则采集岸电功率PB。
语句3同时采集两台发电机功率,实现数据采集同步;每次采集到的两发电机的功率之和均等于电网实际负载功率,并且由于是时钟事件触发,不会错失执行的机会,数据采集周期严格保持在10 ms*10=100 ms,因此是可控的,数据和过载保护也是可靠的[4]。
5 发电机故障现象原因分析
根据上述分析,推断发电机故障发生的原因如下(见图3)。
两发电机并联工作时电网负载总功率约为0.80,功率平均分配,当接入0.6 的负载时,电网负载总功率为1.4 。若由于某种原因,如突加负载导致调频调载出现错乱,使有功功率分配大幅度波动,监控系统在t0检测到2号发电机功率大于1.25 ,该值保持到t4;在t1检测到1号发电机功率大于1.25 ,该值保持到t5;在t1到t4之间,两机显示功率均大于1.25 。
在t2时由于2号发电机功率大于1.25 持续1 s而断开其主开关,此时全部负载加到1号发电机上,导致1号机严重超载而断轴,输出功率迅速下降;在t3时断开其主开关,由于从t1到t5的时间小于1 s,没有触发1号发电机的过载保护动作。由于机带滑油泵失去动力,导致滑油压力下降,经过5 s因滑油压力过低,发电机控制系统触发滑油压力低保护动作而紧急停机,并发出严重故障报警,电力监控系统收到报警后作出相应的保护动作(如断开发电机主开关),并显示和记录此报警信息。
6 结论
(1)监控程序的设计缺陷可能会造成误判、误动作或失控而产生严重后果。本文对本船电力监控程序进行改进后,消除了缺陷,提高了系统的稳定性和可靠性。
(2)PLC作为控制器,应用十分广泛,在对其进行程序设计时,对有关联的数据的监控应保持同步,监控时间应具有确定性,避免使用有缺陷的数据作为控制的依据[5]。
参考文献
[1]林华峰.船舶电站[M].哈尔滨:哈尔滨工程大学出版社, 1998.
[2]国家技术监局.船舶电站通用技术要求和试验方法[M]. 北京:中国标 准出版社, 1992.
[3]康波,李云霞.计算机控制系统[M]. 北京:电子工业出版社, 2015.
[4]赵燕,徐汉斌.PLC从原理到应用程序设计[M]. 北京:电子工业出版社, 2013.
[5]曹立强,船舶电站综合控制系统的设计与实现[D]. 大连海事大学, 2017.
