矿用自动巡检机器人在黄陵一号煤矿的应用
2020-03-31沈超
沈 超
(陕西陕煤黄陵矿业有限公司,陕西 黄陵 727307)
0 引言
随着人工智能技术及机器人技术的发展,巡检机器人广泛应用于变电站、地下管廊、矿井和监狱等处所,替代或辅助人类进行各种枯燥、重复性强、机械性、耗时费力和劳动密集型的巡检工作[1-3]。按照工作模式可以分为飞行式、轮式、轨道式和固定式,而轨道式巡检机器人是现在各领域中应用最广泛的一种[4-6]。
目前,煤矿井下水泵房、变电所、大型输送带输送机巷道等场所的巡视和检修工作大部分都依靠人工进行定时检查、驻点值守。此类场所中环境复杂、空间狭小、积水情况常见,对人工巡视造成非常大的阻碍和干扰。而且人工巡检容易受到个人经验和情绪、主观意识的影响,受到监测手段、数据记录、数据分析方面的制约,通常花费大量人力才能得到有效的数据结果,且得到的数据难以形成系统性,参考意义不高[7-10],当设备有问题不能及时发现而导致问题扩大化。此外,在复杂的设备运行环境下多人多频次巡检也会增加人员人身安全的不确定性。
1 巡检机器人概述
1.1 轨道式巡检机器人分类及特点
分类标准:轨道式巡检机器人是机器人沿着已有的轨道进行巡检工作的,“有轨”是它们最大的共同点,而它们的轨道有的是柔性轨道,有的是刚性轨道。按照轨道材料的强度将其划分为柔性轨道巡检机器人和刚性轨道巡检机器人。
柔性轨道巡检机器人:采用柔性轨道的巡检机器人一般是指悬挂式巡检机器人,如双臂式巡线机器人的轨道材质相对柔韧,多为电缆线或钢丝悬线,轨道承载重量受一定的限制。该类轨道式巡检机器人多从上方俯视巡检其侧方和下方被测目标,利用搭载的各类传感器采集下方被测目标的各种信息,但此类机器人大多具有巡检时易左右摇摆的缺点。
刚性轨道巡检机器人:采用刚性轨道的巡检机器人可用于在上空和地面进行的巡检作业。这类巡检机器人的轨道多为槽钢、工字钢、片钢或者其他自行设计的钢轨。例如,轻型挂轨式机器人,其轨道为两个工字钢拼接而成的;城市管廊巡检机器人,其轨道为单工字钢。
1.2 矿用自动巡检机器人组成及功能
系统组成:ZX127矿用自动巡检机器人主要由集成各种信号传感器的移动巡检本体、无线通讯系统、无线充电装置、轨道系统组成,将巡检过程中的各数据实时采集上传井上集控中心,实时储存分析,适用于城市综合管廊、电缆管廊、矿山水泵房、变电所、大型输送带巷道24 h移动巡检。矿用自动巡检机器人系统结构如图1所示。
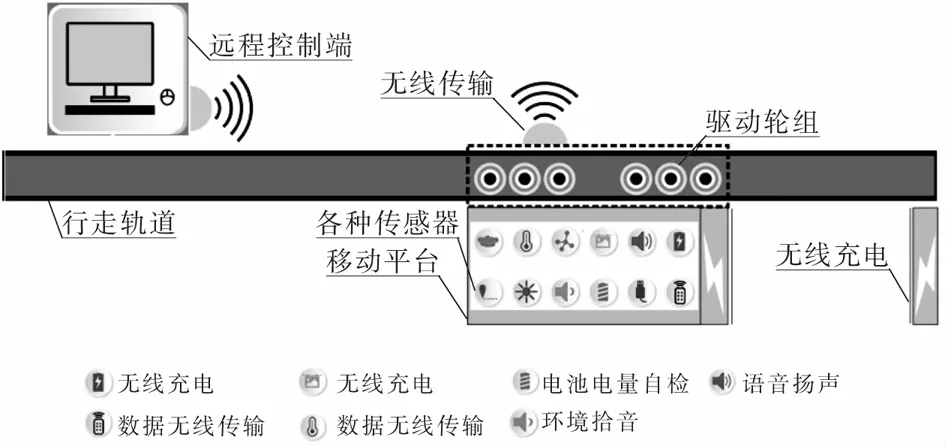
图1 矿用自动巡检机器人系统结构图
主要功能:①移动巡检平台—集合了高清视频采集、音频采集、气体采集、温度采集、热成像采集、激光轮廓扫描等先进功能,带有自动驱动,实现在固定轨道自动行走;②无线通信—采用定向无线模式,在巷道内实现大数据无线传输及信号覆盖,实现对移动中机器人内部采集信息的实时回传。定向传输最远距离可达2 km,传输速率最大可达到100 bps;③自动充电—根据轨道长度预设电量值,当电量低于预设值时,机器人自动返回充电位置,到达充电位置后,限位开关闭合,主控制器给电源触点控制端发送充电命令,电源触点控制端开始对机器人进行充电。采用本安型电源箱作为充电来源,在接触状态下,实时判断电量状态,当电量低于预设值,实现对机器人内部电池进行充电。实现了机器人连续运行状态,实现了机器人自动补充电能,保证了安全性,充电功率可达20 W。
1.3 主要优点及性能
主要优点:①实现连续24 h自动巡检;②实现无线信息传输和无线充电移动巡检;③自动巡检模式对视频、烟雾、气体、温度、音频、热成像、扬声播放、超声波避障等多参数的采集判断;④手动巡检模式可实现指向测温、指向照明、视频对讲;⑤避免生产过程中人员巡检产生危险的因素,避免生产过程中不巡检带来的危害因素扩大,避免人员疏忽大意导致的危害因素漏检;⑥提高巷道内的巡检效率、安全性,提高了矿井管理的现代化水平。
主要性能:矿用自动巡检机器人如图2所示,移动部分工作电压DC为12 V,固定部分工作电压AC为127 V,系统工作电流≤1 A,充电功率为30 W。巡检速度0~1 m/s,爬坡能力≤40°;指令延时≤1 s,通讯方式为4G无线;防护等级IP57。图3为矿用自动巡检机器人系统软件界面。

图2 矿用自动巡检机器人
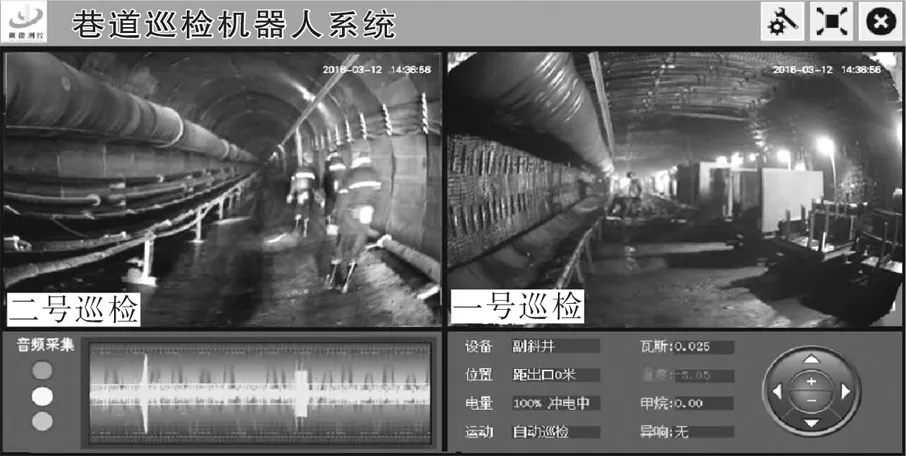
图3 矿用自动巡检机器人系统软件界面
2 矿用自动巡检机器人的实践应用
2.1 在皮带机巷道的应用
黄陵一号煤矿为了减少投入成本,采用一台移动矿用巡检机器人通过一条连续的3 000 m轨道完成整个巷道的巡检,现场测量为单个分站可覆盖约600 m,采用6套子站实现对整个巡检轨迹的通讯全覆盖,实现通讯覆盖无死角,均匀布置3个充电点,实现对巡检机器人的自动充电。矿用自动巡检机器人现场轨道如图4所示,采用皮带机架固定方式或锚杆固定方式两种形式,固定间隔不大于6 m。
2.2 在井下变电所的应用
一号矿针对配电室内双排开关布置情况,采用侧挂式轨道,如图5所示。沿配电室墙壁布置半封闭式轨道,实现对配电开关的自动巡检,整个巡检轨道不大于100 m。单个分站可覆盖整个配电室,配电室内设置一台充电装置,配电室内采用1套子站实现对整个通讯覆盖。

图4 矿用自动巡检机器人在皮带机巷道轨道布置方式
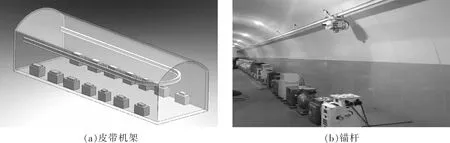
图5 矿用自动巡检机器人在井下变电所轨道布置方式
3 结语
通过自动巡检机器人在黄陵一号煤矿井下皮带机巷道和变电所的应用,可以发现矿用自动巡检机器人具有可监测设备局部表面异常高温,局部空间异常温度变化,突发气体异常变化,突发爆炸、摩擦、撞击等突发异响,顶板和侧帮的变形,皮带机托辊、滚筒是否损坏,以及不同岗位区域语音警示提示等功能。同时,能够实现井上井下视频通话指挥作业,遥控机器人指向照明和测温。矿用自动巡检机器人,具有效率高、费用低、实时性好、安全性高等特点,能够代替人工巡检,降低人工劳动强度,提高了巡检效率和精度,并能根据巡检设备记录的数据及时制定灵活有效的处理方案,避免事故扩大化,大大降低了生产过程中的非正常停机时间,对煤矿的安全生产、减人提效以及打造智慧化矿山起到了积极的推动作用。
