基于计划行为理论的防御性驾驶行为意向分析模型
2020-03-30高红丽高丽英范双双
高红丽,高丽英,范双双
(1.西南交通大学 交通运输与物流学院,四川 成都 611756;2.西华大学 汽车与交通学院,四川 成都 610039; 3.汽车测控与安全四川省重点实验室,四川 成都 610039;4. 四川交通职业技术学院,四川 成都 611130; 5.四川(成都)两院院士咨询服务中心, 四川 成都 610041)
0 引言
随着道路交通环境的日益复杂化,机动车与汽车保有量逐年增加,机动车驾驶员数量持续增长,汽车交通事故发生数占机动车交通事故发生数比率常年居高不下,近5 a来维持在75%以上。
有关道路交通事故相关原因的许多研究结果表明[1-6], 人是导致交通事故的关键因素,驾驶员作为机动车辆的操纵者,是引发道路交通事故的最主要原因。
国内外对不安全驾驶行为进行了一系列相关研究。Parker等[7]研究发现风险态度越高越容易发生攻击性驾驶行为。Ulleberg等[8]分析发现青年驾驶员风险态度因素与风险驾驶行为之间均存在显著相关。李凤芝[9]参考了国外攻击性驾驶行为问卷量表,证明了其中文译本在国内有较好的适应性,随后李凤芝[10]通过问卷调查与结构分析,发现驾驶员具有攻击性驾驶行为的倾向表现。骆勇[11]构建了攻击性驾驶行为量表并进一步分析了A型人格与攻击性驾驶行为的相关性。贾云帆等[12]通过调查驾驶员愤怒量表与驾驶风格量表,发现驾驶员的攻击性驾驶行为与愤怒情绪呈正相关。国外有研究者结合计划行为理论(Theory of Planned Behavior,TPB)与驾驶行为问卷(Driving Behavior Questionnaire,DBQ)设计了驾驶分心的敏感性问卷(Susceptibility to Driver Distraction Questionnaire,SDDQ)来预测驾驶中导致分心驾驶的次任务[13]。Sullman等[14]基于计划行为理论,对212名英国驾驶员进行调查,研究了驾驶员在开车时使用手机发信息或打电话行为意向的强烈程度。
目前国内外针对正向驾驶行为也有相关研究。Özkan等[15]在DBQ的基础上,开发了衡量积极驾驶行为的量表,研究积极行为与违规、错误、攻击性、交通违规和事故之间的关系。在驾驶风格研究中,Harris等[16]通过亲社会性和攻击性驾驶调查量表(Prosocial and Aggressive Driving Inventory,PADI),研究分析出亲社会驾驶行为与交通违规的相关性低于攻击性驾驶行为。陈文金[17]基于防御性驾驶提出了更公正的定量认定事故责任的方法。Shen等[18]利用Özkan与Lajunen的积极驾驶行为的中文译本探讨了我国驾驶员积极驾驶行为与人格的关系。
目前大多数研究着重偏向于驾驶员行为的负面导向分析,从正面引导相对很少。防御性驾驶行为是一种可以有效降低交通事故发生率及事故损伤度的正向驾驶行为,截至目前国内外尚未对防御性驾驶行为进行量化研究,同时当前防御性驾驶技术培训对象主要是运输公司的职业驾驶员,庞大的私家车驾驶群体对防御性驾驶并不了解。基于此,本研究将研究对象锁定为非职业驾驶员,在结合驾驶员心理变量基础上界定防御性驾驶行为基本概念,开发防御性驾驶行为量表(Defensive Driving Behavior Scale,DDBS),通过问卷调查方法获取数据,对防御性驾驶行为影响因素进行定量分析。
1 研究方法与理论
1.1 计划行为理论
计划行为理论(TPB)是Fishbein和Ajzen在理性行为理论(Theory of Reasoned Action,TRA)的基础上提出的,该理论在各种行为研究中得到了广泛应用。根据计划行为理论,本研究提出防御性驾驶行为预测假设模型。模型将驾驶员对防御性驾驶行为的行为态度(Attitude toward Behavior, AT)、主观规范(Subjective Norm, SN)、 知觉行为控制(Perceived Behavioral Control, PBC)和过去防御性驾驶行为(Prior Defensive Driving Behavior, PDDB)作为预测变量,将行为意向(Behavior Intention,BI)作为结果变量。
1.2 结构方程模型理论
结构方程模型整合了因子分析与路径分析两种统计方法,包含观测变量、潜在变量、误差项或误差变量间的关系。完整的结构方程模型涵盖两个基本模型:测量模型与结构模型。
测量模型由观测变量与潜在变量构成,通过测量模型可分析潜在变量与该系列观测变量的共变效果,测量模型大多数用回归模型表示,观测变量为自变量,潜在变量为因变量。量模型用矩阵表示,其公式如下:
X=ΛXξ+δ,
(1)
Y=ΛYη+ε,
(2)
式中,X为外衍潜在变量的观测变量;Y为内衍潜在变量的观测变量;ΛX为连结X对变量ξ的系数矩阵;ΛY为连结Y对变量η的系数矩阵;ξ为外衍潜在变量;η为内衍潜在变量;δ为变量X的测量误差;ε为变量Y的测量误差;δ与ξ,η,ε不相关;ε与ξ,η,δ不相关。
结构模型主要表示潜在变量之间的因果关系,作为因的潜在变量为外衍潜在变量,作为果的潜在变量为内衍潜在变量,因此结构模型又被称为因果模型与潜在变量模型。结构模型的矩阵方程式为:
η=Bη+Γξ+ζ,
(3)
式中,B为内衍潜在变量与内衍潜在变量间的回归系数矩阵;Γ为外衍潜在变量ξ对内衍潜在变量η的回归系数矩阵;ζ为外衍潜在变量对内衍潜在变量无法解释的残差项。
2 防御性驾驶行为
2.1 防御性驾驶行为界定
防御性驾驶概念最早由史密斯提出,并于1952年创办了全美第1个专业驾驶员培训公司,开发了“防御性驾驶培训”课程,随后此概念应用流行于英美等国家,现广为世界各国所采用。结合福建省某研究小组制作的推广视频,将防御性驾驶技术行为界定为:放眼远方,观察前方交通状况,提早预防交通事故;顾全大局,随时环顾所驾驶车辆四周的环境;留有余地,与前车保持安全距离,远离大货车;预估风险,根据周围的交通环境,预测可能发生的事故及危害性,提前做好规避措施;引人注意,通过鸣笛、开车灯、手势等方式提醒其他道路使用者[19]。
防御性驾驶行为是指驾驶员在驾驶全过程中(即驾驶前、驾驶中及驾驶后)始终保持主动防御心理,全面预估并有效搜索由于自己、其他道路交通参与者、车辆、道路及相关设施、不良气候等原因可能带来的显性、隐性风险,通过提前采取预防性操作措施,有效避免主动事故(因自己违规或过错引发交通事故)发生及不卷入被动事故(他人违规或失误引发交通事故)的一种安全驾驶行为模式。
基于防御性驾驶概念与防御性驾驶行为界定,参考积极驾驶行为量表的内容,将防御性驾驶行为设定为6个因子构面:遵守规则不侥幸、预估风险、保持安全空间、专注不分心、引人注意和宽容礼让。据此设计出防御性驾驶行为量表。
2.2 防御性驾驶行为调查数据
采用问卷调查方法,调查对象为非职业机动车驾驶员,其总体数量相当大,根据对应抽样调查公式计算得到最小样本数为385。
本研究所用数据于2018年12月份调查获得。调查方法为通过“问卷星”发放问卷,由于问卷题项较多,为提高调查问卷的回收有效性,采用方便抽样法对作者微信、QQ和校内办公系统中不同时期结识且持有有效驾驶证的亲朋好友逐个发放调查问卷,在此基础上利用滚雪球方法获取更多调查问卷。采用反向题和答题时间两个标准筛选问卷共获取有效问卷525份。驾驶员驾驶行为影响因素包括个人社会属性、驾驶经验和个人安全意识等方面。本研究就个人基本社会属性和驾驶经验对被调查者进行统计,结果如表1所示。
2.3 防御性驾驶行为分析
对DDBS各指标进行可靠性检验,用纠正题项的总相关系数(Corrected Item Total Correlation,CITC)纯化题项,CITC指每个题项与其他所有题项之和的相关系数,其指标值一般应不小于0.4,用克隆巴赫系数α检验测量题项的信效度。对防御性行为量表的调查样本进行信度检验,结果如表2所示,所有题项指标的CITC均大于0.4,各构面的α均大于0.75,表示样本具有较高的可靠性。
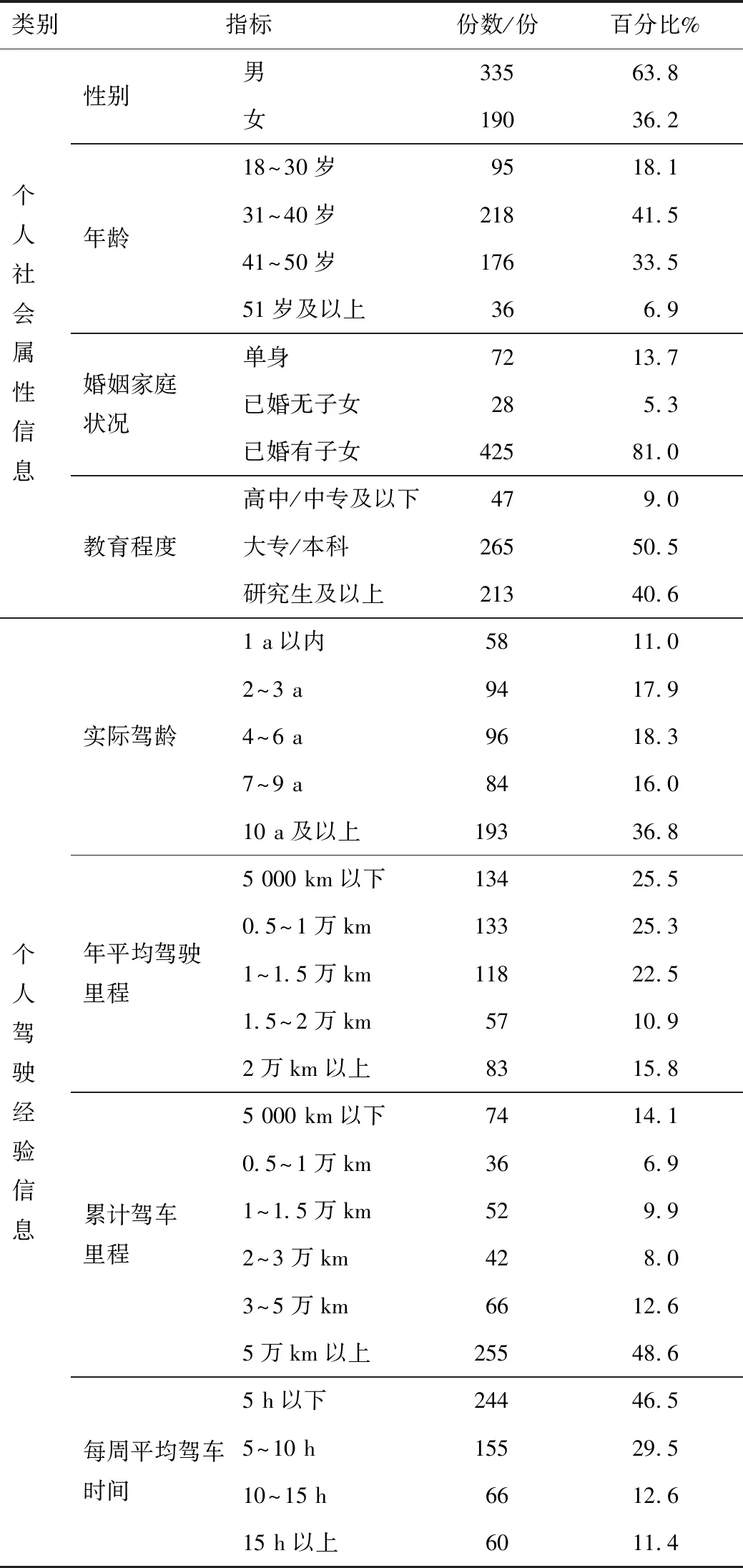
表1 调查数据统计结果Tab.1 Statistical result of survey data
3 防御性驾驶行为结构分析
3.1 模型假设
TPB中的行为态度(AT)体现了驾驶员对防御性驾驶行为的评价,从降低事故率(AT1)、车辆油耗(AT2)、保险支出(AT3)、降低驾驶焦虑感(AT4)与增强信任度(AT5)5个方面分析对防御性驾驶行为的态度;从重要他人(SN1)、其他交通参与者(SN2)、主流媒体(SN3)与交管部门(SN4)4个主观规范方面分析外界压力对执行防御性驾驶行为的影响;从知觉行为控制(PBC),从自主控制(PBC1)、驾驶习惯(PBC2)、促进作用(PBC3)与难易程度(PBC4)4个方面来分析对执行防御性驾驶行为的行为控制力;从自己未来行为意向(BI1)、对重要他人影响意向(BI2)、对其他驾驶员影响意向(BI3)和行为广泛宣传意向(BI4)4个方面设置题项分析防御性驾驶行为意向,并将防御性驾驶行为量表(DDBS)对调查对象最近1 a内防御性驾驶行为的调查数据设定为过去行为的观测变量,通过扩展TPB模型对行为意向的影响因素构建出基于TPB理论的SEM模型,提出以下8点假设:
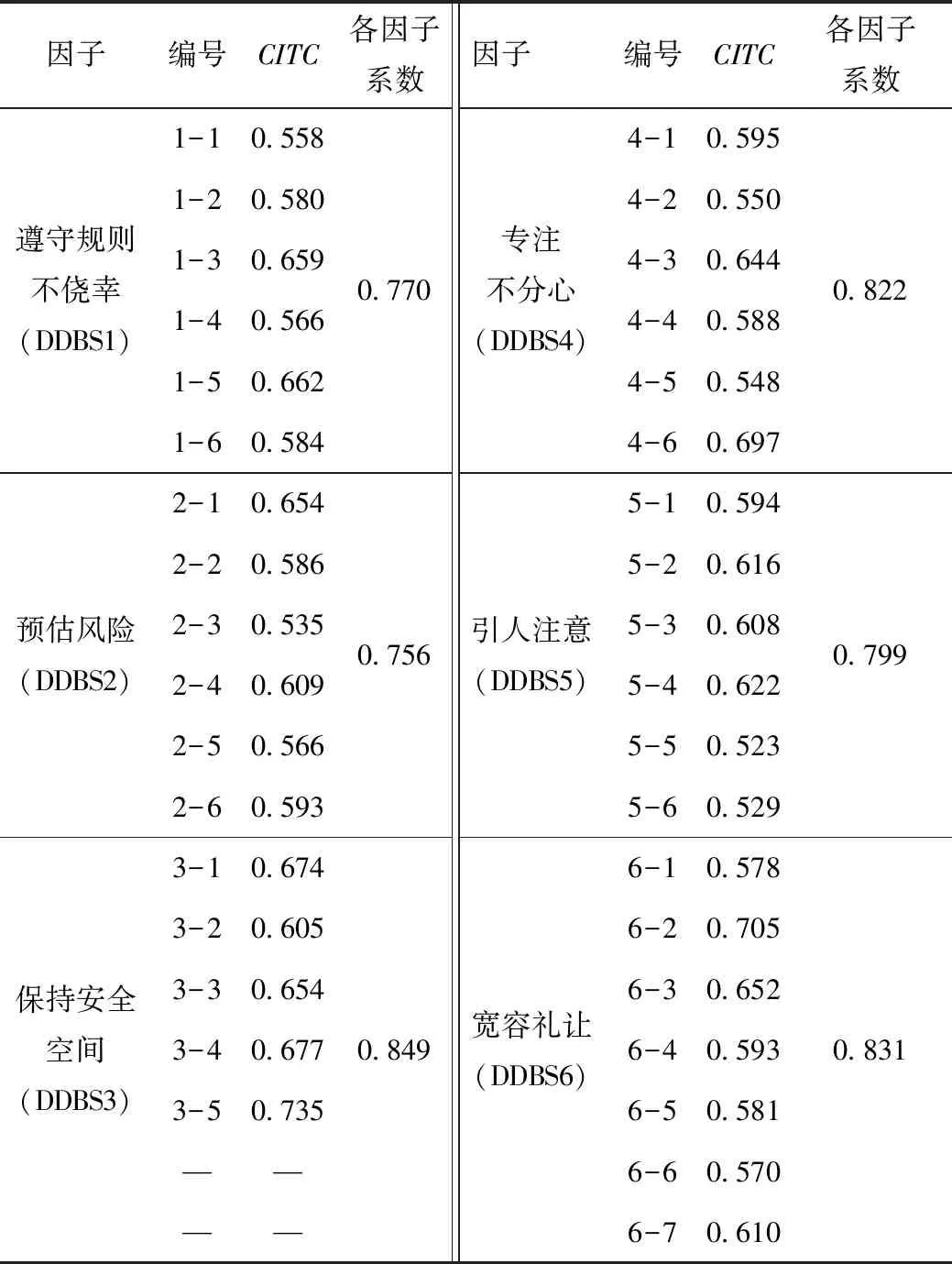
表2 DDBS信度检验Tab.2 Reliability test for DDBS
H1:驾驶员对防御性驾驶行为的态度与主观规范(SN)表现为相互正向影响;
H2:驾驶员的防御性驾驶行为主观规范与知觉行为控制表现为相互正向影响;
H3:驾驶员对防御性驾驶行为的态度与知觉行为控制表现为相互正向影响;
H4:驾驶员的过去防御性驾驶行为分别与对防御性驾驶行为的态度、主观规范、知觉行为控制表现为相互正向影响;
H5:驾驶员对防御性驾驶行为的态度正向影响执行防御性驾驶行为的意向;
H6:驾驶员的防御性驾驶行为主观规范正向影响执行防御性驾驶行为的意向;
H7:驾驶员的防御性驾驶行为知觉行为控制正向影响执行防御性驾驶行为的意向;
H8:驾驶员的过去防御性驾驶行为正向影响执行防御性驾驶行为的意向。
根据模型的基本假设前提,基于TPB的防御性驾驶行为SEM模型,AT,SN,PBC,PDDB为外衍潜在变量,BI为内衍潜在变量。
3.2 模型识别3.2.1 正态性检验
在SEM模型分析中,用偏态系数与峰度系数进行样本变量的正态性检验与评估,偏态系数绝对值大于3、峰度系数绝对值大于10,变量数据偏离正态分布较为严重。根据正态性评估结果可知,偏态系数的数值范围为-1.786~-0.254,其绝对值小于2;峰度系数的数值范围为-1.090~3.176,其绝对值小于4,表示变量数据呈未严重偏离的正态分布,变量满足正态性的检验要求。
用正态概率分布的Q-Q图直观地观察样本的正态性(图1~图2)。由图1和图2可知,DDBS及TPB中的AT,SN,PBC与BI,理论与实际的正态累积概率分布基本重合,其中只有SN具有稍微的偏差,但其偏态系数的绝对值小于2,在可接受范围内,则目标观测变量PDDB,AT,SN,PBC和BI为正态分布变量。
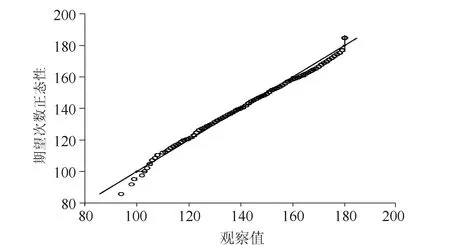
图1 DDBS的样本Q-Q图Fig.1 Q-Q diagram of DDBS
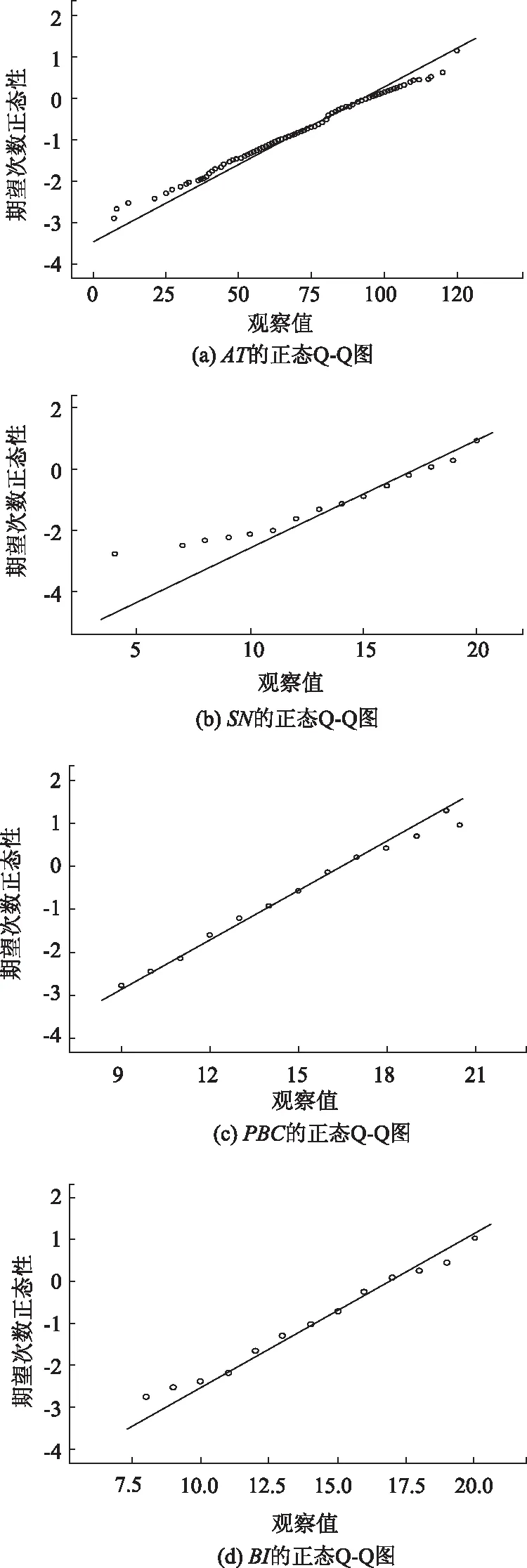
图2 TPB指标的样本Q-Q图Fig.2 Q-Q diagram of TPB indicators
3.2.2参数估计
由于观测变量PDDB,AT,SN,PBC与BI为正态分布,符合极大似然法(ML)的数据分布,ML法是检验SEM模型适配度应用最广的方法。
3.3 适配评价
SEM模型的适配度评价指标用来考察模型与数据的拟合程度,通常用以下6个指标进行判断。如表2所示,模型经过多次修正后,各指标均满足适配标准,说明模型与样本数据间能进行较好的拟合。
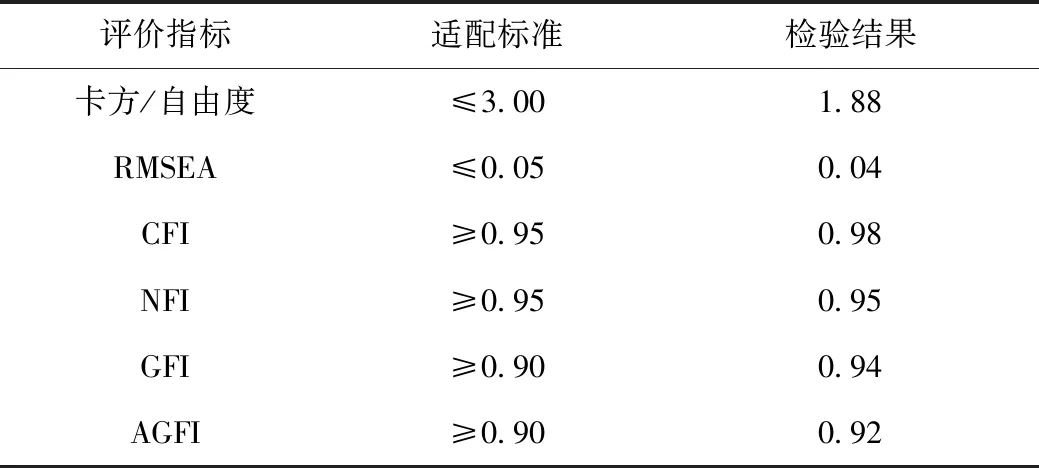
表2 模型适配度评价Tab.2 Evaluation of model fitness
最终的模型系数经过标准化处理,防御性驾驶行为意向(BI)与主观规范(SN)之间的路径系数达到显著性,结果如图3所示。
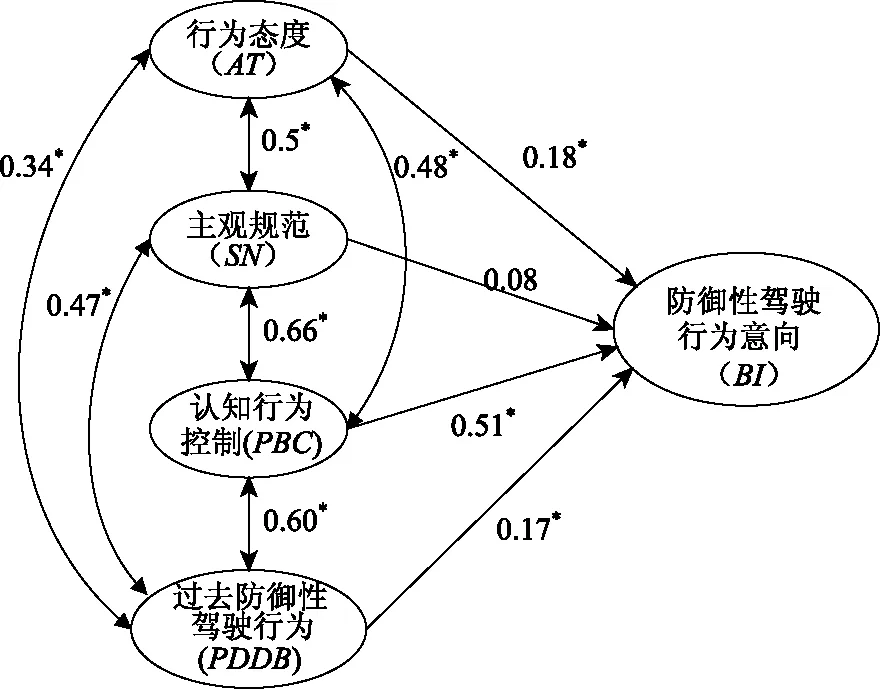
图3 模型拟合结果Fig.3 Model fitting result
4 模型验证结果分析
根据基于扩展TPB的防御性驾驶行为SEM模型修正与验证的结果,对提出的模型假设进行检验,结果如表3所示。
SEM的结构模型分析:主观规范(外界压力)对执行防御性驾驶行为意向的影响不显著,则忽略不计,这一结果与之前研究得出的主观规范对负面行为[20]影响比较显著,对正面行为[21]影响不显著相一致。在式(4)中知觉行为控制对行为意向的影响最大(0.51),说明PBC每增加1单位,防御性驾驶行为意向将上升0.51个单位。
BI=0.18AT+0.51PBC+0.17PDDB。
(4)
SEM的测量模型分析:根据式(1)与式(2)可得到测量模型,由于AT,SN,PBC在进行回归测量模型分析时,所产生常数项的数量级均为10-14,DDBS的常数项数量级为10-13,则可以忽略常数项,得到标准化系数测量模型如下:
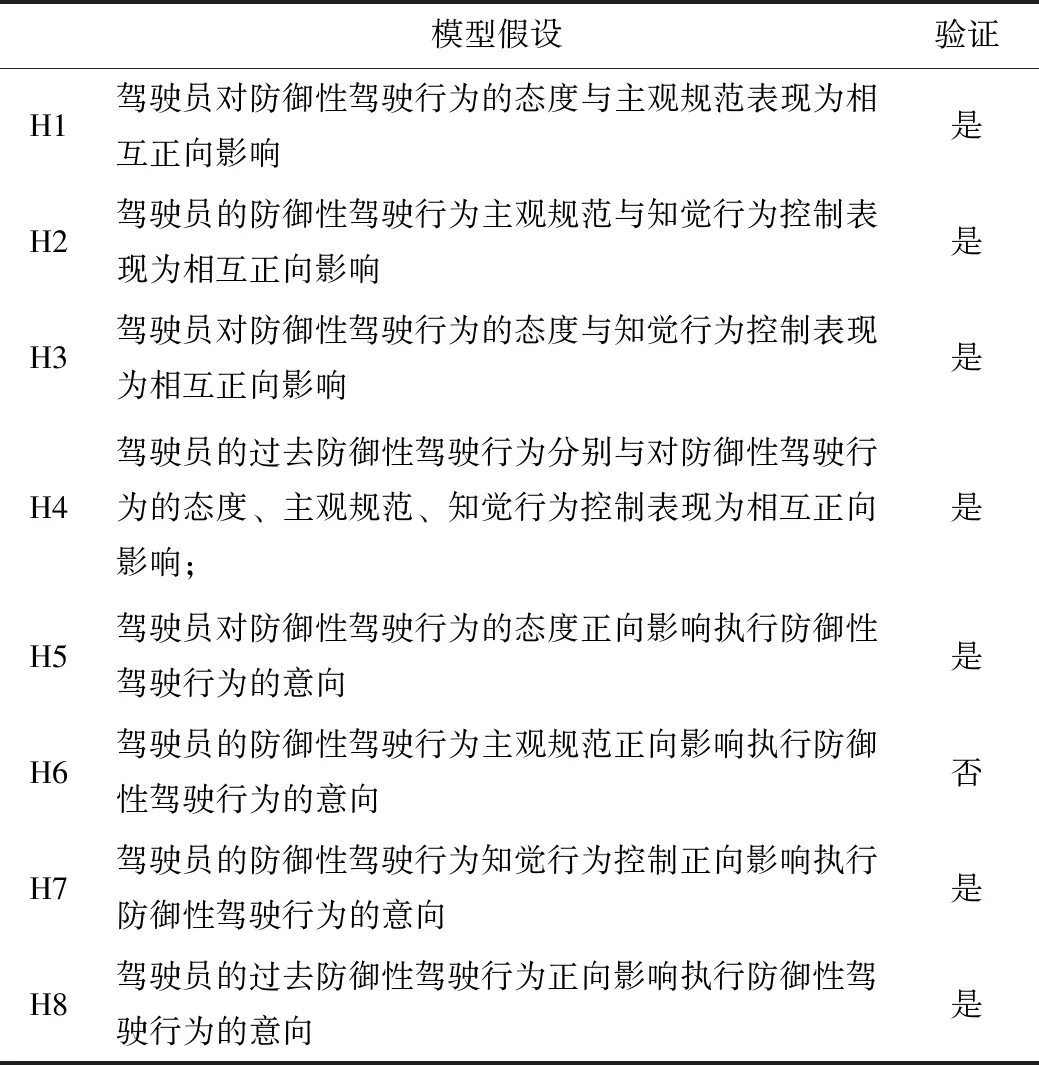
表3 模型假设验证结果分析Tab.3 Analysis of model hypothetical verification result
AT=0.21AT1+0.28AT2+0.27AT3+0.25AT4+
0.26AT5,
(5)
SN=0.33SN1+0.33SN2+0.32SN3+
0.29SN4,
(6)
PBC=0.3PBC1+0.3PBC2+0.26PBC3+
0.41PBC4,
(7)
PDDB=0.19DDB1+0.16DDB2+0.15DDB3+
0.22DDB4+0.19DDB5+0.23DDB6。
(8)
由此可知,在行为态度、主观规范与过去防御性驾驶行为方面,各因子影响程度较为平均;在知觉行为控制方面,一直保持防御性驾驶的难易程度(PBC4)对驾驶员控制自己执行防御性驾驶行为的影响较大(0.41)。
5 结论
本研究结合防御性驾驶技术要点和驾驶员安全意识界定了防御性驾驶行为基本内涵,在此基础上确定了防御性驾驶行为6要素,进一步设计了防御性驾驶行为量表(DDBS)。为定量揭示非职业驾驶员防御性驾驶行为意向影响因素,基于计划行为理论构建了行为态度、主观规范、知觉行为控制、过去防御性驾驶行为与行为意向的结构方程模型,采用网上调查方法获取有效数据,验证了设计量表的信效度。进一步分析表明,知觉行为控制对执行防御性驾驶行为意向影响最大;过去防御性驾驶行为对行为意向存在影响;主观规范对执行防御性驾驶行为意向的影响不显著。说明了该模型中的行为态度、知觉行为控制与过去防御性驾驶行为对执行防御性驾驶行为的意向有较好的解释力与预测力。
后续研究应结合不同道路条件、不同气候环境和不同驾驶群体进一步细化驾驶场景,在本研究防御性驾驶6大核心要点的基础上,设计细化的防御性驾驶行为量表,扩大调查范围,并辅以模拟驾驶器、VR行为获取方式,更细致地分析不同类别防御性驾驶行为特征及影响因素,最终实现驾驶员防御性驾驶能力定量核准与车险、车保等挂钩,促使驾驶员逐步形成良好驾车习惯,使得交通环境形成良性循环,从而大大降低道路交通事故的发生率和对人类的损伤度。
