一种弹载单线激光雷达点云数据滤波算法*
2020-03-29蒋罕寒武军安
蒋罕寒,郭 锐,武军安,赵 旭
(1 南京理工大学智能弹药技术国防重点学科实验室,南京 210094;2 北京信息科技大学高动态导航技术北京市重点实验室,北京 100101)
0 引言
高旋掠飞灵巧弹箭搭载的单线激光雷达在实际探测时会受到多种因素干扰,产生虚假或错误信息。这些虚假或错误信息会干扰识别和决策层,造成误判、漏判的后果。因此,在目标识别和战略决策前必须对一维点云数据进行降噪处理。
弹载单线激光雷达产生的噪声可以分为内部噪声和外部噪声。Green 和 Verly 等在研究时将外部噪声分为失落信息和距离反常噪声,统称为散粒噪声[1-2]。任熙明等研究后认为内部噪声可以作为高斯白噪声处理[3]。国内外研究人员在激光雷达距离像噪声抑制方面已经取得了较多的成果。李自勤等提出了一种基于直方图的滤波方法,利用局部数据的直方图对距离反常噪声进行检测,对仿真数据处理较好[4];陈晓清提出了一种基于包围准则的距离反常噪声抑制算法,能较好的均衡噪声和保护细节[5]; Chen提出了先进行多级中值滤波再进行直方图滤波可以兼顾噪声抑制和细节保护,性能较好[6]。庄秀华等人使用滑动中值滤波去除车载单线激光雷达工作时产生的距离反常噪声[7]。
上述去噪算法很难直接应用到弹载激光雷达点云降噪过程或存在丢失目标细节信息的问题。为此文中结合掠飞灵巧弹箭扫描特点,提出了基于梯度分割的加权滤波算法,该算法在有效去除散粒噪声、平缓高斯白噪声的同时,兼顾了对细节信息的保护,有利于后续目标识别。
1 掠飞弹一维点云数据降噪算法
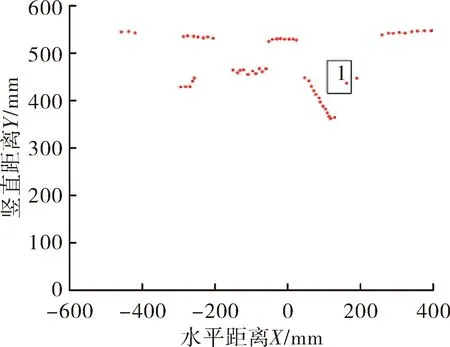
如图1所示,掠飞灵巧弹箭的攻击对象是装甲目标。装甲目标与障碍物呈现一定的区域分布,经坐标转化后实测的点云数据如图2所示,图中标出了装甲目标及散粒噪声点。
一维点云数据降噪的实质是一维空间滤波。用每点邻域点集的数据对其补偿,能有效平滑高斯白噪声。

图1 高旋掠飞灵巧弹箭稳态扫描示意图

图2 原始一维点云数据图
然而相邻两物体间存在一定的高度差,其中任一物体上的边缘点会对邻近物体上的边缘点产生较大影响;散粒噪声点也会使得其邻近的数据偏离真实数据。图3是处于不同高度的3个物体表面采集到的部分数据点。A、B两物体高度相差较大,仅考虑邻域补偿的结果是e点被拉高,f点被拉低;i点、o点也会由于散粒噪声点j的干扰偏离真实数据。

图3 一维滤波示意图
因此先基于梯度将一维点云数据划分成不同的簇和散粒噪声点。阈值分割标准为:
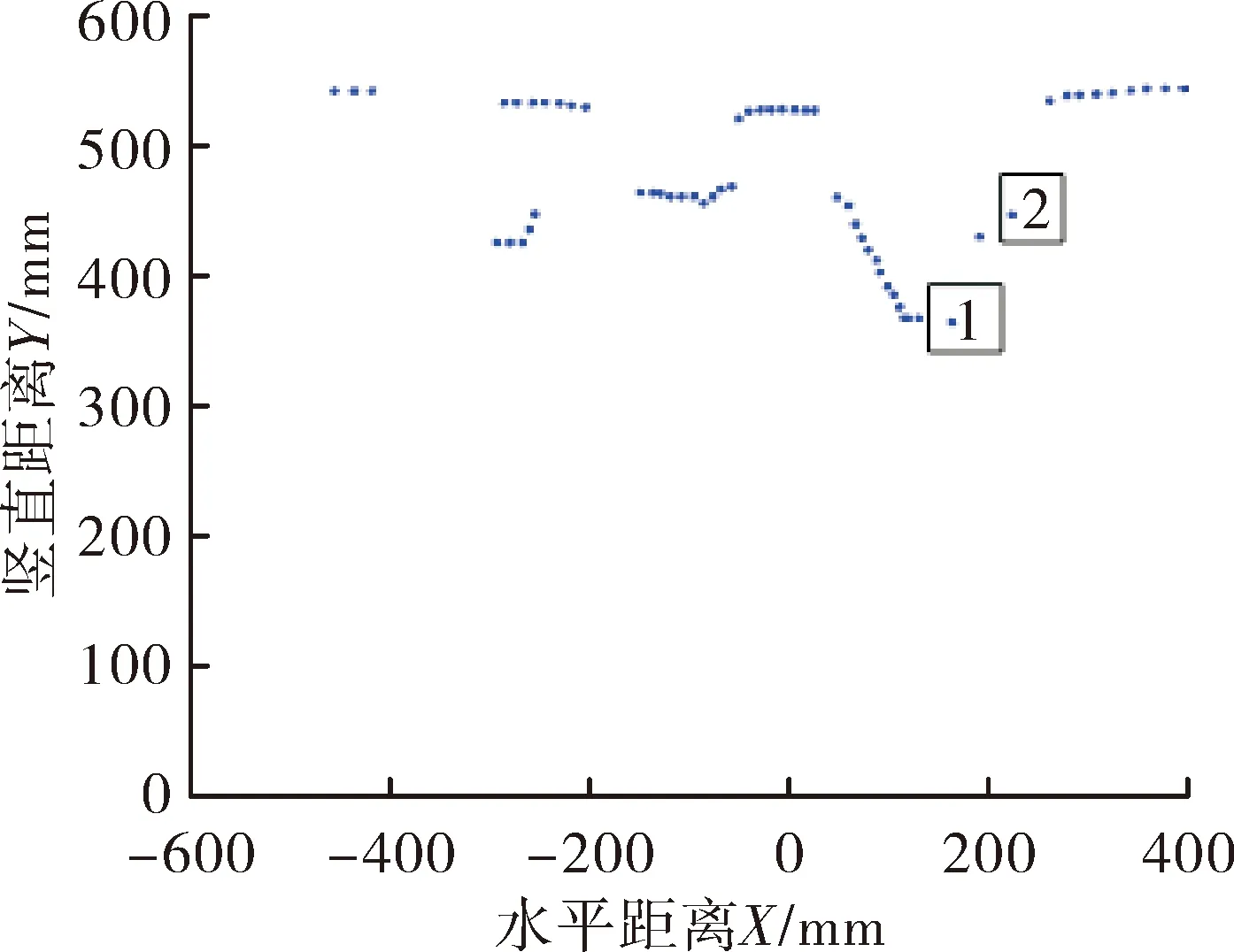
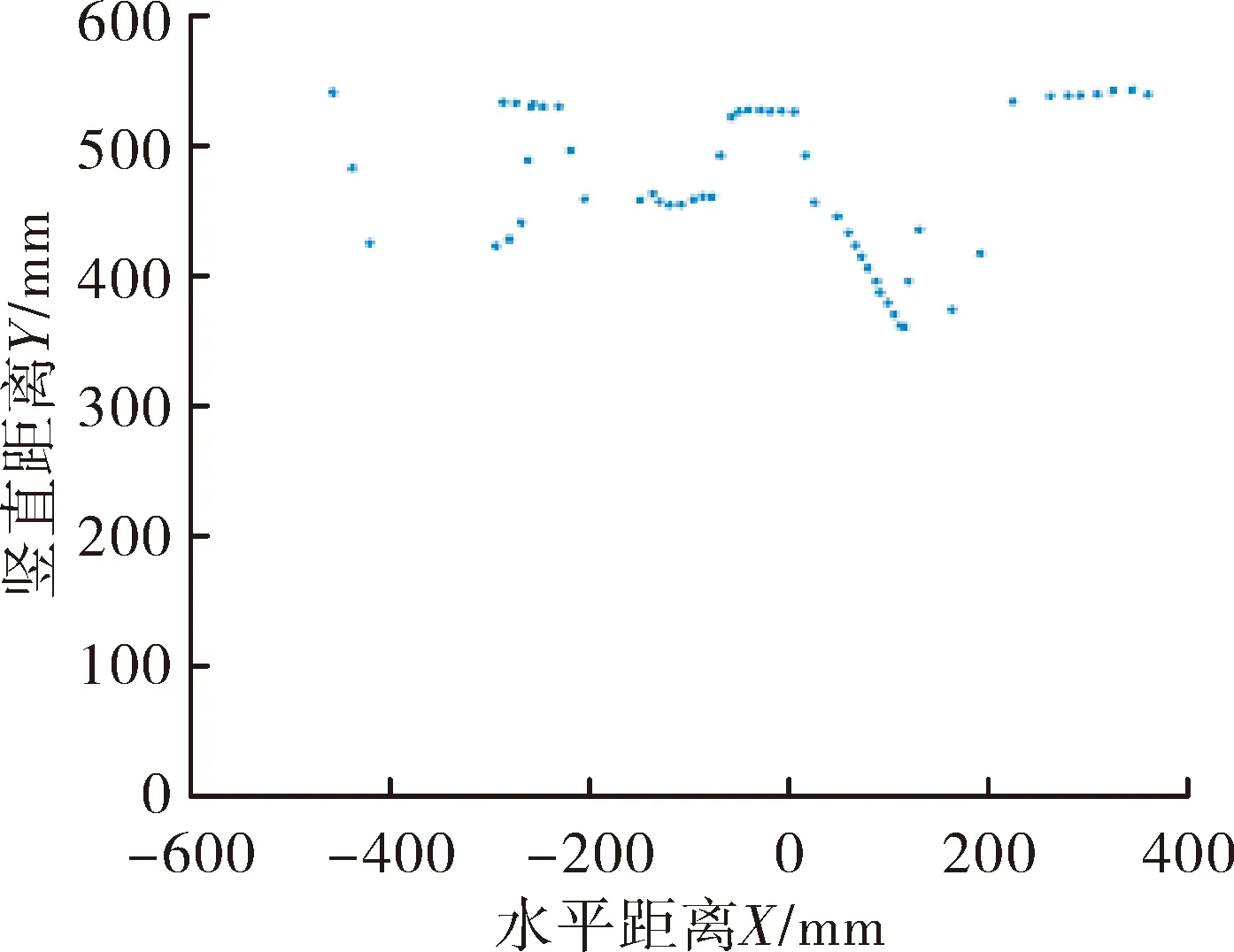
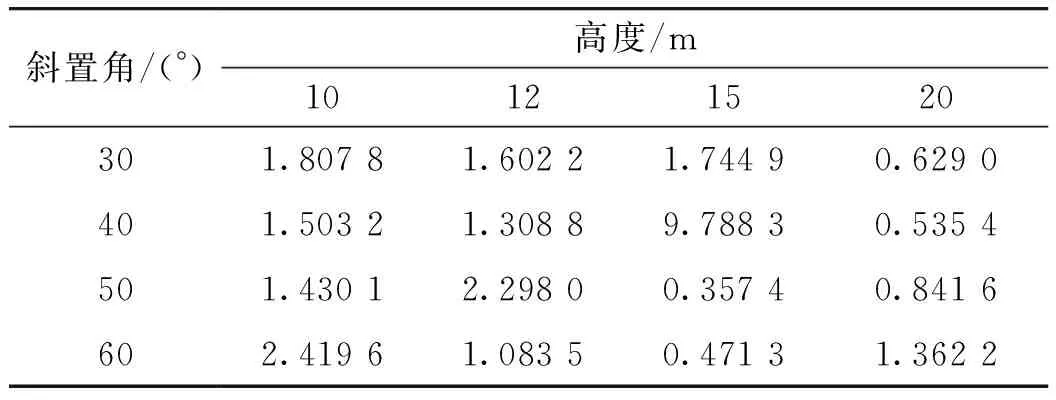
Di= ||Hi-Hi-1|| (1) 其中:Di是相邻两点的梯度;Dmax是预先设定的梯度阈值;Hi是第i点高度值。 步骤1:单线激光雷达采集到的数据格式为(ρi,θi)。其中,i=1~n;ρi为激光发射点到反射点间的距离;θi为单线激光雷达探测旋转角度;n为一次采集的数据总量。坐标转换公式为: Xi={ρicosθi} (2) Yi={ρisinθi} (3) 其中,Xi、Yi为水平方向距离及竖直方向的距离。 步骤2:求当前点与前一点的梯度值并与预先设定的阈值进行比较。若满足式(1),则当前点与前一点属于同一簇。取当前点邻近的b个同簇点高度值组成向量Y。 Y=[Yi-b,…,Yi-1,Yi] (4) 其中b决定了滤波窗口尺寸。 计算所取邻域点到当前点的水平方向距离dj。 dj=||Xj-Xi|| (5) 其中j=i-b,…,i-1。 求邻域点到当前点的水平距离之和的m倍,即 (6) 其中,m决定了当前点其本身的权重因子。 求各邻域点及当前点的权重且归一化得: (7) φi=1-∑φj (8) 其中j=i-b,…,i-1。 求邻域点的权重系数向量β得: β=fliplr([φi-b,φi-b+1,…,φi-1]) (9) 其中fliplr函数是将向量翻转,向量值反向排序后重新赋值,使得各点的权重重新分配。 添加当前点的权重系数得: β=[β,φi] (10) 将Y向量与β向量的数量积替换当前采集点的Yi值。 Yi=β·Y (11) 若式(1)不成立,跳到步骤3。 步骤3:求当前点与后一点的梯度值并与阈值进行比较。若满足式(1),当前点与后一点属于同一簇。其他操作与步骤2相同。 若不满足式(1),该点即为散粒噪声点,直接剔除。 依据上述步骤2、3依次处理所有数据。 具体流程图如图4所示。 图4 算法流程图 1)能否有效去除散粒噪声点。 2)能否有效保护数据细节信息。 3)算法复杂度分析,能否满足弹载计算机的运算速度要求。 建立细节保护评价方法[8],其滤波前后数据的方差R为: (12) 其中:N为采集数据总量;G′i为算法处理后的数据;Gi为原始采集的数据。R计算结果越小,表明算法保护细节的能力更强。 采用缩比实验的方法,缩比为1∶29,模拟高旋掠飞弹箭弹载单线激光雷达对地面装甲目标的探测过程。实验平台是在水平单向横轴上搭载可旋转的单线激光雷达,模拟掠飞弹箭的扫描过程。激光雷达选用的是思岚公司的A1单线激光雷达,采样率最高8 kHz,转速5.5 r/s。实验装置如图5所示。 图5 实验装置图 图6 新算法效果图 图7 中值滤波效果图 图8 高斯滤波效果图 图9 均值滤波效果图 图6~图9是对图2中的数据经新算法、中值滤波、高斯滤波、均值滤波算法处理后的效果图。可以得出: 1)中值滤波结果最为平滑,能有效平滑散粒噪声点(图7中标识的2点)。然而在数据离散的地方,部分点的数值会突变(如图7中标识的1点)。 2)高斯滤波在物体的边缘处会产生失真现象。 3)均值滤波将数据平滑成相连接的曲线,完全失真。 4)与上述3种滤波算法相比,新算法在平滑数据和有效去除散粒噪声点的同时保证了所有数据点的真实性。 上述分析得出新算法与中值滤波能有效去除散粒噪声点,满足评价标准1)。 采用控制变量法研究单一变量下滤波算法保护细节特征的能力。分别计算高旋掠飞弹箭位于10 m、12 m、16 m、20 m的高度及激光雷达斜置角在30°、40°、50°、60°时的R值,比较中值滤波和新算法保护细节的能力。表1与表2是不同高度与角度下两种算法的相应的R值。 表1 不同高度和斜置角下中值滤波的R值 表2 不同高度和斜置角下新算法R值 综合分析两表中的数据,可以发现:1)表1存在一组数据突变值,而表2数据相差不大。这是由于当数据离散程度较高时,中值滤波会与真实结果产生较大偏差。2)表2中的数据明显小于表1中的数据。因此新算法能更有效保留目标的细节信息,且不会产生严重失真的问题。 同时本算法的时间复杂度为O(n)。在Matlab上编写验证程序,运行后时间为0.93 ms,速度较快,满足弹载计算机运算速度要求。 通过理论分析和实验室采集实测数据,应用新算法对数据进行处理,验证了本算法能有效抑制搭载单线激光雷达的高旋掠飞弹箭扫描过程中产生的噪声。算法的适用性还需要外场实弹数据进一步进行验证。2 算法具体流程

3 实验验证分析
3.1 算法优劣性评价标准
3.2 实验对比分析



4 结论
