面向微动特性获取的雷达波形设计
2020-03-28田西兰
田西兰
(1.中国电子科技集团公司第三十八研究所, 安徽合肥 230088;2.孔径阵列与空间探测安徽省重点实验室, 安徽合肥 230088)
0 引言
微动是由目标的特殊结构在特定的受力作用下引起的,常常是目标“独一无二”的运动状态,属于目标的精细特征。由于微动为小幅运动,可控性低,对目标微动的模仿非常困难,因此基于微动特征的目标识别技术已被认为是雷达目标识别技术中最具发展潜力的技术之一[1-5]。2000年,美国海军研究实验室(Navy Research Laboratory)的Chen将微动及微多普勒概念正式引入到雷达观测领域,开拓了基于雷达信号的目标微动特征提取这一新领域[6-7]。在观测直升机、螺旋桨飞机、喷气式飞机等目标时,在一定的姿态角范围内,由于飞机旋转桨叶对雷达回波的调制,雷达回波中往往含有周期性调制的微多普勒成分。这为飞机目标的识别提供了重要的特征信息。
然而,雷达目标微动特征的提取不仅与提取方法、微动目标自身参数有关,还与雷达发射信号的波形参数密切相关,发射波形决定了目标回波的信息质量和数量。这就给雷达目标识别理论和技术提出了新的课题。当前雷达波形设计的理论基础是Woodward所提出的模糊函数[8],这个函数阐明了雷达波形和距离分辨率及径向速度分辨率之间的关系。但是,这一波形设计理论,不能满足目标微动特性获取对雷达信号的要求,因为该理论没有考虑发射信号能否完全激励飞机目标的微动特征。因此,分析发射波形参数与微动特征之间的联系,针对有效获取微动特性的需求对雷达波形进行设计,具有重要意义。
实际上雷达波形参数对微动特性获取的影响,主要看旋转桨叶的调制信息能否稳定、可靠地采集到。这要分析雷达脉冲重复频率、脉冲宽度和雷达驻留时间与飞机旋转桨叶调制特征的关系,针对微动特性获取这一目的,设计一组“最优波形”参数。本文第1节建立飞机目标调制特性理论参数模型;第2节阐述面向微动特性获取的雷达波形设计方法;第3节利用仿真实验进行验证,实验结果证实了本文方法的有效性。
1 飞机目标调制特性理论参数模型
建立飞机旋转桨叶物理结构与雷达回波调制特性的数学模型是分析发射波形参数与微动特征之间联系的重要基础。本节以直升机为例进行分析说明,设直升机处于平飞状态,雷达和直升机旋转桨叶的几何关系如图1所示,雷达位于空间固定坐标系(U,V,W)的原点Q,初始时刻目标距坐标系原点距离为R0,桨叶转动中心相对于雷达固定坐标系的方位角和俯仰角分别为α和β。设直升机桨叶数为N,桨叶根部到转动中心距离为L1,叶尖到转动中心距离为L2,桨叶转动角频率为ωr,则接收到的旋转叶片回波信号可表示为[9]


(1)
式中,A为散射信号强度,ωc为发射信号频率,λ为波长,vr为机身径向速度,t为时间,函数Φk(t)可表示为

(2)
式中,φ0为初始旋转角。
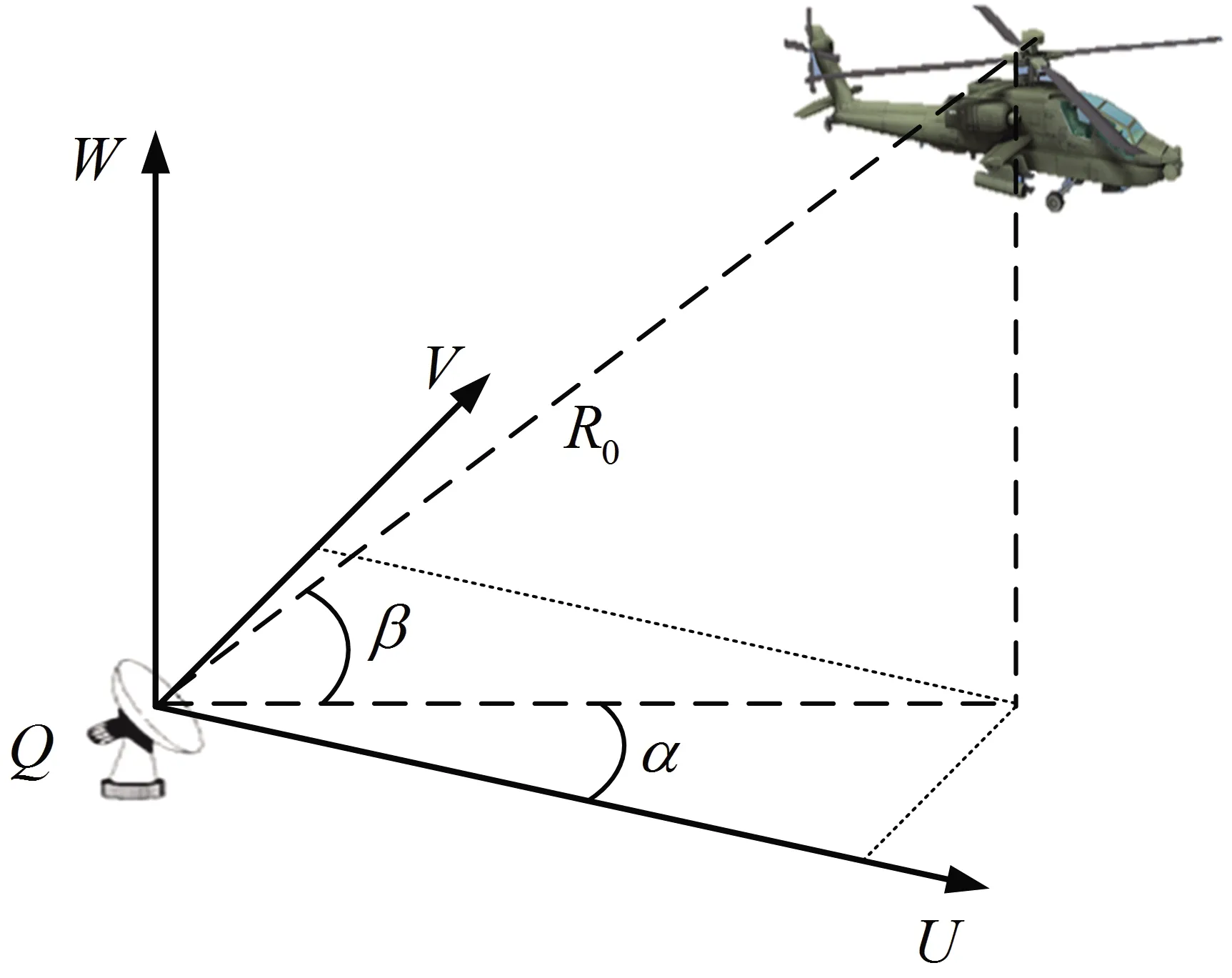
图1 雷达和直升机旋转桨叶的几何关系
1.1 时域特征
桨叶反射信号的时域特征由式(1)的幅度来定义,可以看出,时域信号是由一系列辛克函数组成的。桨叶反射信号探测也取决于桨叶的数量。当桨叶数为偶数时,在雷达径向矢量不变的前提下,两块处于相对位置的桨叶几乎同时产生桨叶反射信号,因此桨叶反射信号出现的频率为
Fr=Nfr
(3)
式中,fr为桨叶转动周频率。桨叶反射信号的3 dB时宽近似为
(4)
对于具有奇数片桨叶的直升机,情况则有些区别,很明显,当某块桨叶出现桨叶反射信号时,其他桨叶并不会同时出现桨叶反射信号。由此出现桨叶反射信号的频率为
Fr=2Nfr
(5)
此时,桨叶反射信号的3 dB时宽近似为
(6)
由于桨叶可以看成具有相似的机械构造和雷达目标特征,因此对每个桨叶而言,在相似的雷达限时脉冲期间,接收到的每个桨叶回波信号也非常相似。两次桨叶反射信号出现的时间间隔也是其频率的倒数,即Tc=1/Fr。
1.2 频域特征
对式(1)进行傅里叶变换得到频谱表达式为

(7)
可见,调制谱是由一系列谱线间隔为Δf=Nfr的谱线组成,其中CNK为谱线幅度,fc为发射信号频率,fd为机身多普勒频移,M为调制谱的谱线个数,其表达式为
(8)
由此可得调制信号带宽为
(9)
2 波形设计
目前雷达探测大都采用相参体制的线性调频脉冲波形,所以本节以线性调频脉冲波形为基础,针对稳定、可靠获取微动特性这一目的,对线性调频脉冲波形参数进行设计。
2.1 脉冲重复频率设计
受空气动力学的限制,桨叶叶尖的切线速度是有限的,它和叶片长度的乘积几乎是一常数,表明调制谱的带宽也是有限的。因此,若雷达脉冲重复频率(PRF)足够高,就可能得到全部调制谱。对于脉冲多普勒雷达,其脉冲重复频率决定了采样速率。所需的最小采样速率必须满足奈奎斯特(Nyquist)速率以避免频率混叠。
由式(9)可知,桨叶引起的最大微多普勒频移为
(10)
对于实际飞机目标,还应考虑机身运动,设由机身产生的多普勒频移为fd,则目标整体产生的最大多普勒频移为
{Fd}max=fd+{fmicro}max
(11)
因而所需脉冲重复频率应满足
fPRF≥2×{Fd}max
(12)
2.2 脉冲宽度设计
为了探测到至少一次桨叶反射信号,雷达必须使用脉冲重复频率足够高的脉冲信号,如此才不会在两次脉冲间隔期间漏掉桨叶反射信号。如图2所示,可看出为保证至少有一部分脉冲信号照射到桨叶,脉冲重复周期TPRT必须短于桨叶反射信号持续时长τf[10]。如果发射脉冲的脉冲重复周期间隔时长超过桨叶反射持续时间,则其对桨叶反射信号的探测将取决于发射脉冲对桨叶反射持续时间的作用时机,如此则该情况下的探测并不可靠。

图2 桨叶反射信号与雷达脉冲参数关系
当某块桨叶转动到能出现桨叶反射信号的位置时,为确保至少一个完整的脉冲能量照射到桨叶,则需要稍短一些的脉冲重复周期,可用式(13)表示:
τp+TPRT≤τf
(13)
式中,τp为脉冲宽度。
因此,为保证至少有一个完整的脉冲探测到桨叶反射信号,脉冲持续时长加上脉冲重复周期必须小于桨叶反射信号的持续时长。
2.3 雷达驻留时间设计
雷达驻留时间的持续时长必须加以考虑,雷达驻留时间必须足够长,以确保在驻留时间内至少有一块桨叶与雷达径向矢量相垂直。如图2所示,可以看出雷达驻留时间Tacc必须长于桨叶反射信号出现的间隔Tc,即
Tacc≥Tc
(14)
满足以上条件,将保证在雷达驻留时间内,至少能探测到一次桨叶反射信号。
3 实验结果与分析
3.1 飞机目标调制特性理论参数计算
本文采用仿真实验验证波形设计方法的正确性,仿真数据按式(1)产生典型场景下直升机、螺旋浆飞机及喷气式飞机三类飞机目标桨叶回波。仿真参数设置如下:雷达工作在C波段,频率fc=5 GHz,波长λ=0.06 m;多种典型直升机、螺旋浆飞机及喷气式飞机桨叶结构参数如表1、表2及表3所示;直升机高度为3 km,径向距离为7.098 km;螺旋桨飞机高度为8 km,径向距离为8.827 km;喷气式飞机高度为10 km,径向距离为16 km。

表1 直升机桨叶结构参数

表2 螺旋桨飞机桨叶结构参数

表3 喷气式飞机桨叶结构参数
由于直升机尾翼相对于主旋翼要小得多,在回波能量中所占比例较小,因此在对直升机目标进行微动特性分析时没有考虑尾翼的调制。根据前文桨叶反射信号时域及频域特征计算表达式,得到各型直升机桨叶反射信号间隔、3 dB时宽、谱线间隔、谱线条数、调制带宽等微动特征参数如表4所示。

表4 计算得到的直升机微动特征参数
在对螺旋桨飞机和喷气式飞机进行微动特性分析时,考虑了其双发动机结构,即机身左右具有结构相同的2副桨叶,2副桨叶之间有一定的距离和相位差。表5及表6分别给出了计算得到的各型螺旋桨飞机和喷气式飞机微动特征参数。
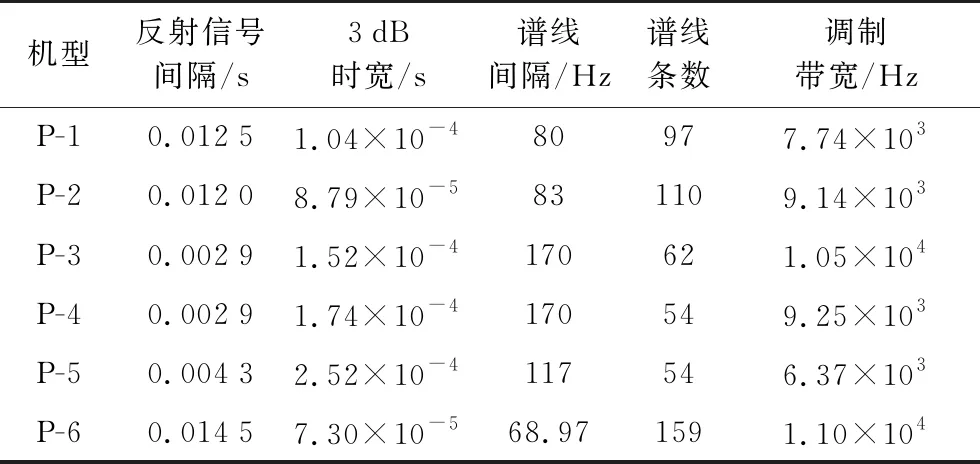
表5 计算得到的螺旋桨飞机微动特征参数

表6 计算得到的喷气式飞机微动特征参数
3.2 波形参数设计结果
1) 脉冲重复频率
考虑飞机目标机身运动,通常直升机、螺旋桨飞机及喷气式飞机飞行速度一般不超过300 km/h,800 km/h及1 225 km/h,其对应的多普勒频移分别为2.777 8 kHz,7.407 4 kHz及11.343 kHz。根据表4、表5及表6计算得到的各型飞机目标微动特征参数可知,直升机、螺旋桨飞机及喷气式飞机最大微多普勒频移分别可达7.050 kHz,5.500 kHz及9.350 kHz。综合上述分析,直升机、螺旋桨飞机及喷气式飞机目标整体最大多普勒频移分别为9.827 8 kHz,12.907 4 kHz,20.693 kHz。根据式(12)脉冲重复频率设计原则,所需脉冲重复频率应大于或等于42 kHz。
2) 脉冲宽度
根据式(13)脉冲宽度设计要求,所需脉冲宽度τp需满足
τp≤τf-TPRT
(15)
即脉冲宽度需小于或等于(τf-TPRT)的最小值。根据表4、表5及表6计算得到的各型飞机目标微动特征参数可知,直升机、螺旋桨飞机及喷气式飞机最小3 dB时宽分别为57 μs,73 μs及50.1 μs。根据前文脉冲重复频率设计值,得到脉冲重复周期为23.81 μs。综上,脉冲宽度应小于或等于26.29 μs,进一步假定占空比为30%,则脉冲宽度应为8 μs。
3) 雷达驻留时间
根据式(14)雷达驻留时间要求,雷达驻留时间必须长于桨叶反射信号出现的间隔。根据表4、表5及表6计算得到的各型飞机目标微动特征参数可知,直升机、螺旋桨飞机及喷气式飞机最大桨叶反射信号间隔分别为78.1 ms,14.5 ms、0.667 ms。因此,雷达驻留时间理论上最少应为78.1 ms,考虑到工程实际,雷达驻留时间至少应达到100 ms。
(2)从单源先驱体出发来对合成的陶瓷先驱体进行理论构造,这样得到的陶瓷先驱体能够克服取代差异,减少缺陷。通过这两点构造的陶瓷先驱体结构,在分子动力学模拟下能够获得影响因素更少的有效理论结果,对今后研究同样有参考意义。
通过理论分析并结合典型场景下的仿真实验,得到C波段雷达面向微动特性获取的一组“最优波形”参数如表7所示。
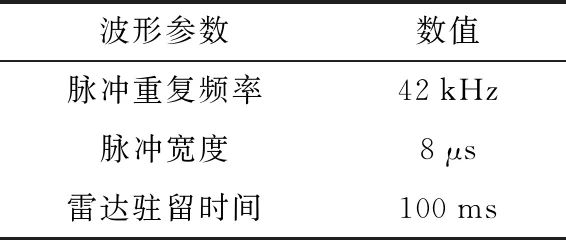
表7 波形参数设计结果
3.3 可行性验证
本节根据表7得到的一组“最优波形”参数,来验证对3类飞机目标微动特性获取的可行性。
1) 直升机微动特性获取可行性验证
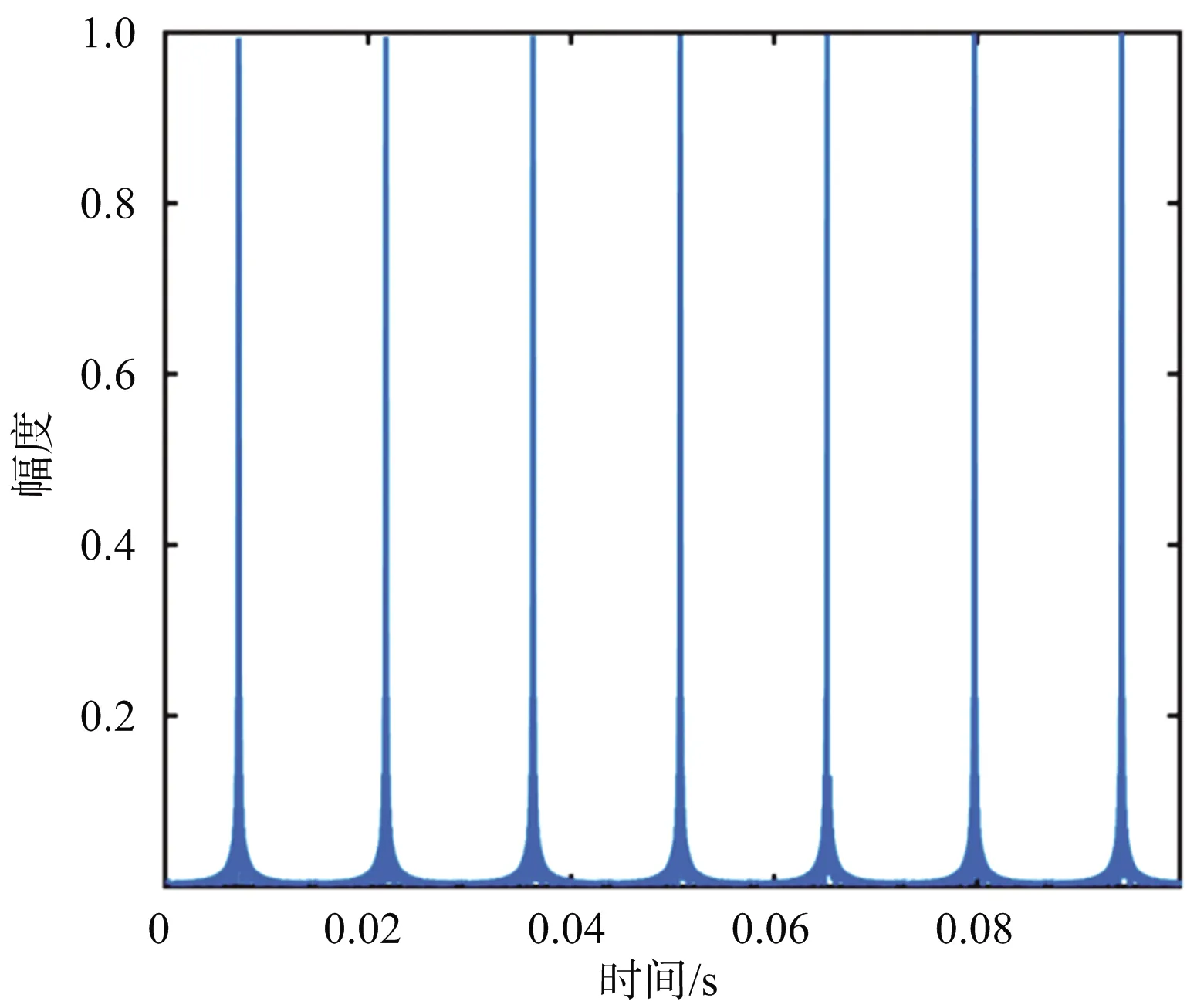
从表4可以看出,H-1型直升机桨叶反射信号间隔最长,H-2型直升机调制带宽最大,因此以H-1型及H-2型直升机为例进行验证。图3为H-1型及H-2型直升机微动特性获取实验结果。其中图3(a)为H-1型直升机时域调制特征,由于H-1型直升机桨叶反射信号间隔较长,在雷达驻留时间内仅获得1次桨叶反射信号回波;图3(b)为H-2型直升机时域调制特征,由于H-2型直升机桨叶反射信号间隔较短,在雷达驻留时间内获取了2次桨叶反射信号回波。此外,从图3(c)及图3(d)两型直升机信号频谱可以看出,两型直升机都未发生频谱混叠。上述实验结果表明,所设计的波形参数能稳定、可靠地探测到桨叶反射信号,且能完整地显示整个调制谱,因此满足微动特性获取需求。
(a) H-1型直升机时域调制特征

(b) H-2型直升机时域调制特征

(d) H-2型直升机信号频谱图3 直升机微动特性获取实验结果
2) 螺旋桨飞机微动特性获取可行性验证
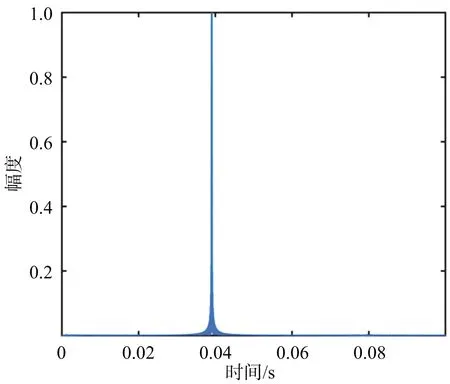
从表5可以看出,P-6型螺旋桨飞机同时具有最长桨叶反射信号间隔及最大调制带宽,因此以P-6型螺旋桨飞机为例进行验证。图4为螺旋桨飞机微动特性获取实验结果。其中图4(a)为P-6型螺旋桨飞机时域调制特征,在雷达驻留时间内,P-6型螺旋桨飞机获取到了7次桨叶反射信号回波;图4(b)为P-6型螺旋桨飞机信号频谱,可以看出,由于机身运动,微多普勒谱不再关于零多普勒对称,且由于脉冲重复频率足够高,频谱没有产生混叠。上述实验结果表明,所设计的波形参数满足螺旋桨飞机微动特性获取需求。
(a) P-6型螺旋桨飞机时域调制特征
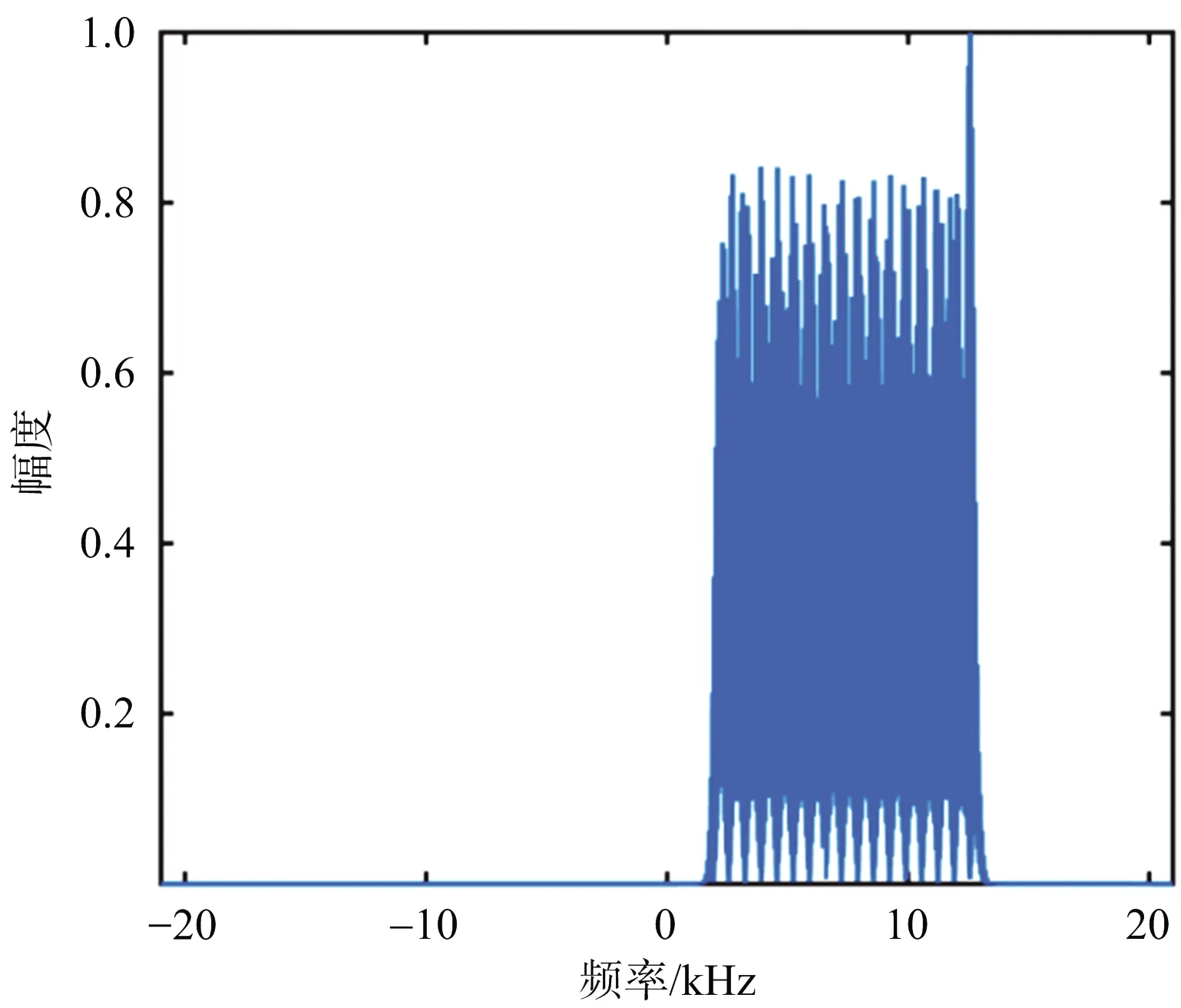
(b) P-6型螺旋桨飞机信号频谱图4 螺旋桨飞机微动特性获取实验结果
3) 喷气式飞机微动特性获取可行性验证
从表6可以看出,T-2型喷气式飞机调制带宽最大,T-3型喷气式飞机桨叶反射信号间隔最长,因此以T-2型及T-3型喷气式飞机为例进行验证。图5为喷气式飞机微动特性获取实验结果。其中,图5(a)、(b)分别为T-2型及T-3型喷气式飞机时域调制特征,图5(c)、(d)分别为其对应的局部放大图,可以看出,两型喷气式飞机桨叶反射信号回波非常密集;图5(e)、(f)分别为T-2型及T-3型喷气式飞机频谱,可以看出其频谱没有产生混叠。实验结果表明所设计的波形参数同样满足对喷气式飞机微动特性获取需求。
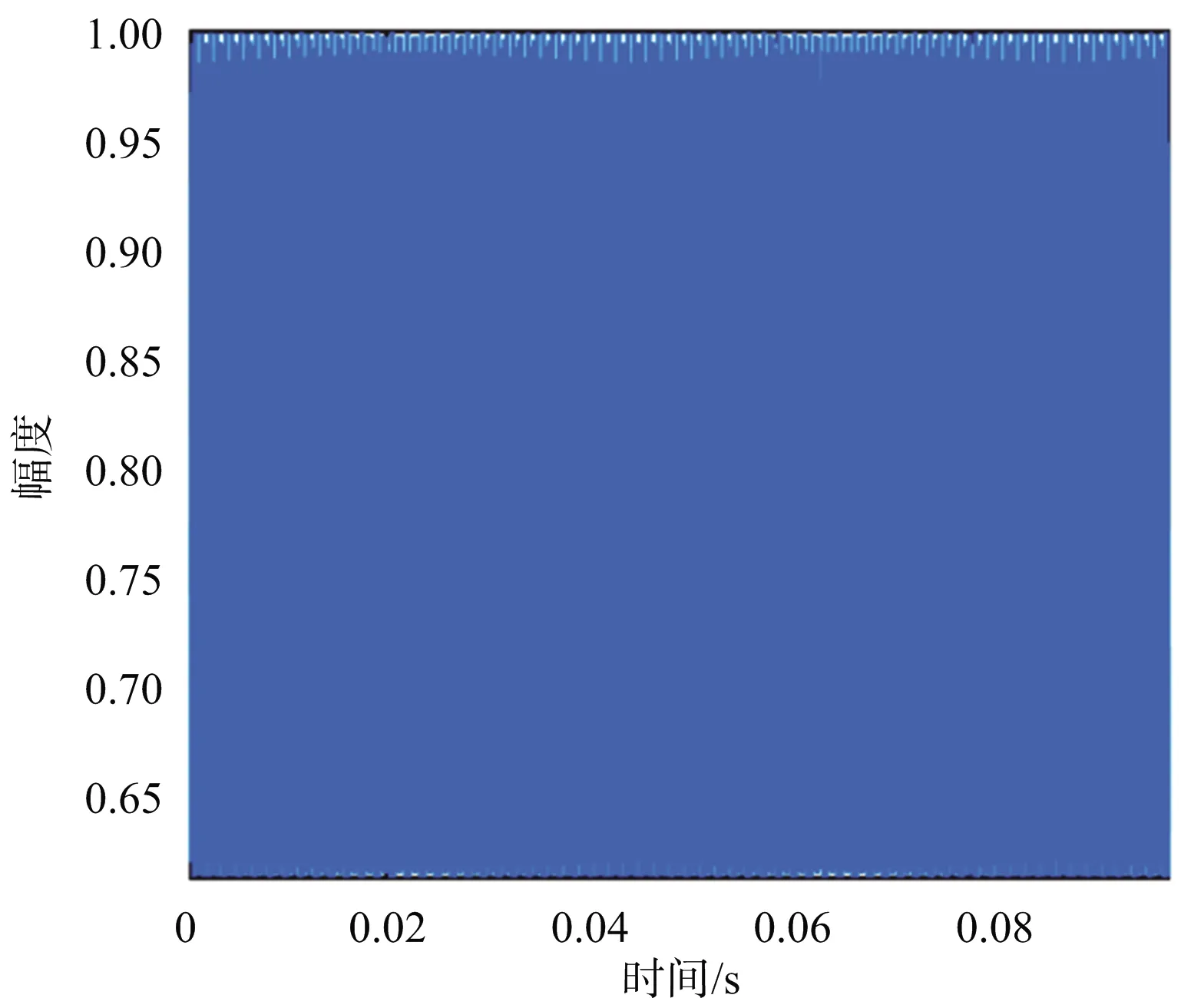
(a) T-2型喷气式飞机时域调制特征

(b) T-3型喷气式飞机时域调制特征

(c) T-2型喷气式飞机时域调制特征局部放大图

(d) T-3型喷气式飞机时域调制特征局部放大图

(e) T-2型喷气式飞机信号频谱

(f) T-3型喷气式飞机信号频谱图5 喷气式飞机微动特性获取实验结果
4 结束语
雷达发射波形的脉冲重复频率、脉冲宽度、雷达驻留时间等参数直接影响着目标微动特性的获取。本文以直升机为例,建立飞机目标调制特性理论参数模型,并详细分析了桨叶反射信号的时域及频域特征,在此基础上,针对有效获取目标微动特性这一目的,对雷达波形参数设计进行理论上的分析,最后,设计了典型场景下的仿真实验,实验结果验证了本文波形设计方法的有效性。本文理论分析及实验结果为从雷达回波中提取目标微动特征奠定了数学基础和理论指导,能极大地促进雷达飞机目标识别的研究。
