无人机在遂昌山体滑坡中的应用
2020-03-27王经运
王经运
(中国安能集团第二工程局有限公司,南昌330096)
1 引言
近年来,无人机技术取得了新的突破和进展,被广泛应用于与各个领域,如农业、军事、抢险救灾等。无人机能够应对各种环境和地形,可承担实施监控、运输等任务,这些特点使无人机可以在灾害发生时对受灾情况进行高效的监控,将灾情第一时间传输给救援人员,从而提高救援效率和安全性。以下以浙江丽水遂昌特大滑坡为例,分析无人机在抢险救援中的应用。
2 无人机简介
2.1 无人机遥感系统的组成
无人机的监控能力依靠遥感系统实现,遥感系统具有机动、快速、经济的优势,主要由无人器飞行控制技术、遥感传感器技术、通信技术、GPS 差分定位技术等技术的应用共同实现。根据实际情况和要执行的任务,还可以改变无人机中相机的配置,如普通相机、倾斜相机、红外热成像等,从而多方面、广区域的收集灾害数据,使得数据更具参考性[1]。
2.2 无人机的特点
2.2.1 安全性高
无人机通过操作器进行控制,不需要有人员进行驾驶,因此,十分安全,可以执行一些危险的任务,能够深入重灾区进行数据收集工作。
2.2.2 灵活性高
与传统的飞机相比,无人机的体型较小,易于操控,十分灵活,在天气正常的情况下,可以随时起飞并高效地完成相应任务。
2.2.3 监控速度快,检测范围广
空中障碍物较少,无人机在执行任务时可以高速的移动,及时感到受灾区域进行拍摄。同时,从高空中可以看到更广的受灾范围,能监控到更多地区[2]。
2.2.4 影像清晰、分辨率高
无人机飞行高度较低,没有云层和雾气的干扰,利用高分辨率的相机能拍出显示出清晰地视频和影像。
2.2.5 测图精度高
无人机飞行高度在50~1000m,低高度的飞行使无人机能够清晰地显示出地形构造,精确度可达0.05~0.2m,能够满足精细绘制的需要。
2.2.6 经济性高
无人机体型小,不需要占用地方进行停放,对电能、燃料等能源的消耗也很少,操作系统简单方便,操作人员能很快地上手,降低了人员培训的经济消耗,同时,易于保养,大大减少了维修保养所耗费的资金。
3 无人机在遂昌山体滑坡灾害救援过程中的应用情况
3.1 灾情分析
2016 年,受台风及连续强降雨的影响,浙江遂昌县北界镇苏村破崩台山体发生大规模山体滑坡,滑坡共摧毁掩埋房屋30 余栋,造成28 人失联.滑坡体面积约为2.35×105m2,体积约为8×105m3,滑坡体在高速滑入桃溪河后形成了高达25m 的堆积坝,使得桃溪河产生断流,水位提高了20m,极大地危害了当地居民的生命财产安全,并给当地的交通、通信等设施造成了严重的损害。
武警水电二总队在经群众联系得知上村受灾后立即展开救援行动,利用卫星和实地对照迅速掌握受灾地点,随后连夜赶到受灾地点开展救援工作。
3.2 无人机帮助掌握灾情情况
救援队伍在进入受灾区域后迅速利用无人机对现场情况进行了勘察,对受灾情况有了基本掌握后针对性地提出了3 个重要的勘察任务:寻找失联人员及其周围环境、桃溪河河道堵塞情况、滑坡体运动情况。根据这些任务的指导性,无人机从不同方面对受灾区域进行了拍摄,在经过软件处理后构建出了三维实体模型,并得到了相关影像。通过这些数据对受灾情况有了基本的掌握,以下将进行简要分析。
3.2.1 失联人员抢救情况
受灾群众的生命安全在抢险救灾中是第一位,因此,确认失联人员的位置是无人机勘察的首要工作。根据无人机所拍摄的正射影像数据,救援人员绘制了受灾区域的埋深图。
从图1 和图2 可以看出,下游A 区受灾情况较轻,掩埋深度低于10m,部分房屋未被掩埋,存在生还人员的概率大;中部B 区受灾情况极为严重,滑坡体将这一区域完全掩埋,掩埋深度在10~30m,同时,被堵塞的桃溪河水迅速升高,脱离河道灌入这一区域,使这一区域被完全浸润并形成渗流,人员存活可能性大大降低;上游C 区受滑坡体影响较小,但处于堰塞湖区域,人员存活难度较高。
通过对滑坡区域埋深图的分析,救援队从人员生还概率较大的A 区域开始救援工作,在救援的过程中对B 区域进行更精确地勘探,绘制堰塞体的剖面图,寻找合适的位置进行导流槽的挖掘工作,排除决堤危险,避免河水高涨产生二次伤害。
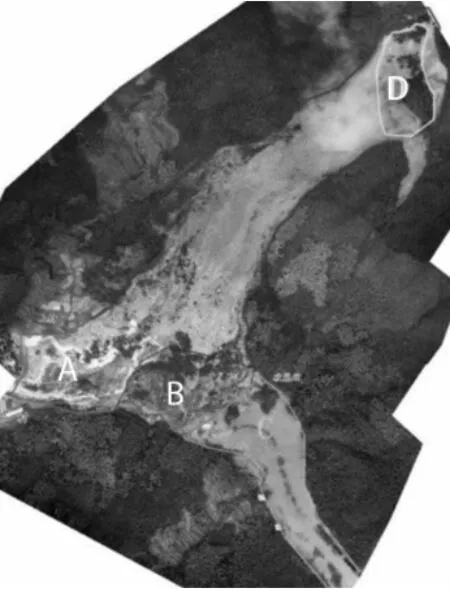
图1 9月30日正射影像图
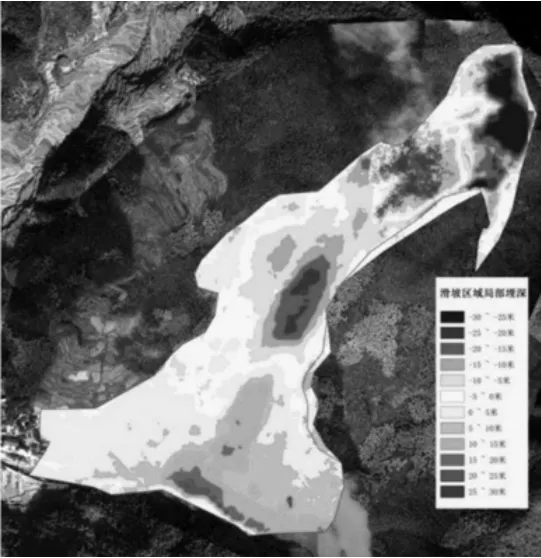
图2 9月30日滑坡区域埋深图
保留第一灾情现场对后续的抢救和分析工作具有重要的意义,但抢险救灾工作会使第一受灾现场被破坏,利用无人机所拍摄的正射影像能很好地保存第一现场的情况,方便后期的灾情还原,为救援工作的推进提供一些参考。
3.2.2 后续救援情况
在对受灾情况有了基本了解之后,救灾队伍迅速开展了救援工作,多项工作同时展开:A 区域的挖掘工作、堰塞湖排险方案的确定工作、滑坡残留提的监控工作。在此基础上,和当地政府部门取得联系,对受灾群众的人数有了进一步的确定,对获救人员进行登记和安置。根据灾后正射影像,救援技术人员采用技术手段分析相关数据,对失联人员的分布图进行了绘制(见图3)。

图3 失联人员分布图
救援工作进行的过程中,在天气允许的情况下,无人机每天都会对受灾区域进行正射影像的采集,并对失联人员的遗物进行位置的确认,将坐标发送给救援人员,方便救援工作的展开;同时,监控山体和堰塞湖的状况,防止出现二次灾害威胁救援人员的安全。通过无人机的实时监控很好地避免了复杂的地形对救援工作产生阻碍,有效地将救援范围缩小,提高救援效率,同时保证了救援人员的生命安全。
堰塞湖的存在使救援工作的危险性大大提升,极大地降低了救援效率,未解决堰塞湖的威胁,无人机对堰塞湖进行了细致全面的检测。将正射影像和实地勘察数据相结合,救援队伍创造性的相处了“先北槽南降,再南槽北降”的排险方案,有效解决了堰塞湖的危险[3]。
3.3 无人机在救援工作中体现出来的问题
3.3.1 无人机续航能力较差
无人机的续航能力较差,只能飞行1h,其监测面积受续航能力的影响大大降低,一定程度上影响了检测效率,还有很大的进步空间。
3.3.2 数据处理难度大
无人机所传回来的拍摄影像和数据数量巨大,普通计算设备很难及时处理,使制图成果出现了一定的滞后性,同时,由于网络信号和传输速度的影响,数据的传输效率较低。
3.3.3 受天气影响较大
在下雨天或雾气较大的天气里,无人机的飞行速度受到一定程度的影响,无法进行监察工作。
3.3.4 负载物品质量较重
无人机所配置的各种拍摄镜头、红外检测设备、正射影像拍摄设备等物品的质量较重,使无人机的荷载增加,即增加能耗,又增加了操作难度。为解决这一问题,应对这些设备进行优化,替换为小型精细的设备,减少无人机的荷载。
4 结语
无人机在此次救援工作中发挥了巨大的作用,其实用性得到了进一步的确定,并且积累了许多救援经验。研究人员应根据本次救灾过程中无人机存在的问题进行进一步的优化,让无人机发挥更强的救援作用。
