KIVA机器人解析
2020-03-27BenEinstein编译石义民
文/ Ben Einstein 编译/ 石义民
当前,在无人机备受关注的同时,为仓库配送中心提供动力的机器人系统更加引人注目。在地面运行的数以万计的移动机器人已经投入运营,并正在运送包裹。这些系统最初是由位于波士顿的Kiva Systems公司构建的。笔者找到一台老版本的Kiva机器人,打开它明亮的橙色外壳,展示内部绝妙的工程设计。本文分享了Kiva辛勤工作的成果。

亚马逊仓库中使用的Kiva机器人
一、背景
在类似亚马逊和Staples这样的大型电商公司配送中心内部,每天有大批人员步行数英里,将商品从货架上捡出来并放在盒子里。该过程费用高、效率低下并且容易出错。在Kiva出现之前,最先进的便捷工具是自行车。
在Webvan公司任职一段时间后,Kiva的创始人Mick Mountz意识到:如果可以将货架移动到人面前,而不是人移动到货架,那么拣货效率将大大提高。Mick于2003年与Pete Wurman和Raあaello D'Andrea合作,创立了 Kiva Systems公司,从根本上改变了人和物品在仓库中的移动方式。
Ki v a 开发的系统包含5 个关键部分:
(1)可移动且非常灵活的定制版Kiva货架;
(2)地板上铺设的二维码网格;
(3)配有秤、激光和传感器的智能包装站;
(4)可迅速将货架提升并在地板上移动的橙色机器人;
(5)最重要的部分:将所有硬件连接在一起的复杂而强大的软件系统。
尽管所有这些都是令人惊叹的,并且对于系统正常运行必不可少,但本文着重介绍在仓库地板上运行的橙色机器人。

老版本KIVA机器人

图1 托举铸件背面、铸件局部
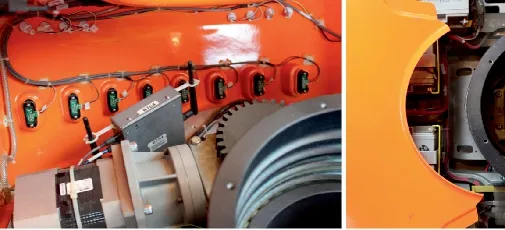
图2 前壳内部红外传感器组、后壳顶部视图

图3 KIVA注塑罩壳

图4 管式碰撞传感器、红外传感器
二、构造与机构
原则上,Kiva 机器人非常简单。它每隔40英寸就会读取地板上铺设的QR或Datamatrix二维码,并从其大脑的云中接收行动指令。机器人到达货架后,运用巧妙的举升机构,自身旋转以举起一个滚珠丝杠机构,将货架从地面抬起。
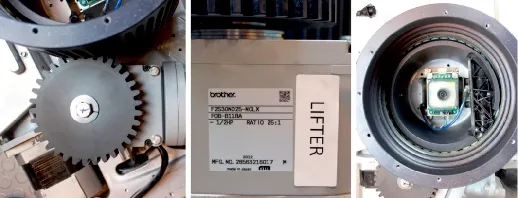
图5 举升驱动装置俯视图、升降电机减速器、举升装置中心视图

图6 机器人底部、定制的Kiva铸造车轮

图7 车体悬架、车体铸造件、铸件局部
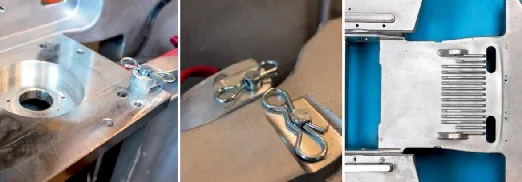
图8 U形销连接、铸造散热片结构
机器人看起来很简单,但需要考虑以下问题:货架可以重达一千磅(注:1000磅=453.6千克),配送中心有几万个货架,几百个机器人和几十个包装站。一次微小的碰撞或货架跌落可能造成数千美元的损失。这可不是玩具机器人。
机器人外壳的每一侧都有一组红外传感器和一个用于检测和避免碰撞的气压避障装置。还有一个充电口(Kiva能自动停靠并自主充电)和一系列LED状态指示灯。另外一个主要部分是可以将货架抬离地面X形升降机构。
机器人有三个独立的运动部分:两个驱动轮和一个用于货架举升的马达。举升马达旋转的同时,两个驱动轮都反向旋转,因此在机器人旋转时,升降机构和货架显得静止。这样减少了驱动组件的数量,并避免了复杂的液压或剪式举升机构。
升降机的顶部是一个大型铝铸件(图1),同时,机器人的主要大型结构部件都是铸铝材质的。所有铸件由319通用合金制成。每个零件都经过一系列铸造之后的精加工,比如精加工面和螺纹孔。类似的工艺在汽车发动机缸体,液压执行器等许多高质量的铝制零件上常常会被采用。
每个红外传感器都内置滤波器逻辑,并通过串行总线进行通信。从图2上,可以看到无线控制模块以及举升马达和大齿轮。在机器人的后部,有四个铅酸电池和大电流电线。
前后两个罩壳均由ABS真空注塑成型(图3)。用于制造这些零件的真空成型机和CNC设备都非常大。这部分非常复杂并且价格昂贵。

本刊重点关注的物流展会
机器人前后面为曲面,在整个曲面上研制全长的碰撞传感器难度极大,Kiva工程师提出了一种简单的,具有成本效益的解决方案。他们利用乙烯管/橡胶管连接简单的压力传感器(图4),一旦检测到压力变化,机器人就会停止所有运动。右图中的黑色部件用于接收压力数据,并连接所有的红外传感器,然后整体连接至主控制器。
举升机构采用定制的滚珠丝杠,这是最复杂、最昂贵的组件,滚珠丝杠外部与标准的尼龙小齿轮和驱动电机连接(图5)。电机由Pittman(Ametek)制造,具有27 in-lbs的扭矩和近1Kw的失速功率。直角双向减速机由日本Brother制造,可在72rpm的转速下以25:1的减速比处理407 in-lbs的扭矩。这款电机和减速机的组合单价约为1000美元(批量可能更低)。
卸下升降器和电子设备后,可以将机器人翻转过来,以更好地查看传动系统(图5,主逻辑板隐藏在钢板面板下方)。背面有相同的两个电动机和变速箱,定制的铸造Kiva车轮(图6),可能是为了保证在混凝土地板上具有极高的耐久性。两端是两对双轮式360度旋转脚轮。这样的传动系统支持原地回转。
主体部分由三个铸铝部件组成(图7),它们通过简单的U型夹销连接在一起,从而实现了简单、被动的双重悬架运动。它们都采用319铝合金材质,并且在铸造后进行了机械加工。随着产量的增加,Kiva的工程师可能会转向使用带有钢具的低压铝模具成型。注意右下方前铸件顶部的散热片(图8):电机控制器的大型晶体管靠在这些散热片的背面,以实现最大的散热效率,这是个很精巧的设计。
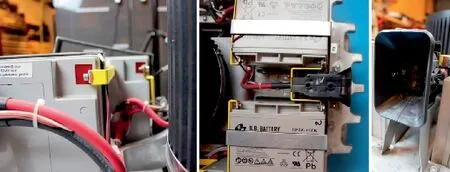
图9 电池连接、充电口、充电口局部

图10 顶部摄像头、底部摄像头

图11 主逻辑板连接器、卸下的主逻辑板、通信模块和天线
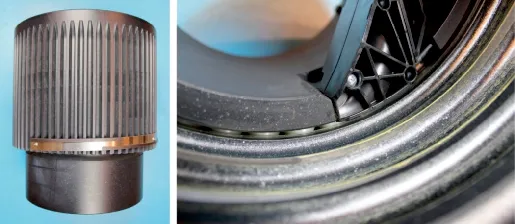
图12 举升滚珠丝杠侧视图、局部视图
三、电子元件
即使Kiva机器人自身几乎没有决策权(它的动作都由云中的服务器控制),但机器人在举升和控制数千磅商品的过程中需要一些非常正式的电子设备。
该系统由四个串联的12v,28Ah铅酸电池供电(48v DC,见图9)。其中两个电池还在支架下方安装了定制的热感应器,以确保它们不会过热。当电量不足时,机器人会脱机返回充电站充电。充电端口的设计允许在接口配合过程中的较大偏移。
Kiva系统的主要组成之一是装在升降机构内部的双摄像头成像模块。一个摄像头向下扫描地面,识别仓库地板上的二维码。另一个摄像头向上扫描货架底部。每个摄像头有6个嵌入的红色LED灯提供照明,像机器人的其余部分一样,所有部件都是定制的(图10)。图像处理板在两个成像器之间,上面装有ADI ADSP-BF548 多媒体处理器,该处理器通过高速串行进行二维码检测并传递结果。
主逻辑板将所有部件连在一起(图11)。电机控制电路由48V电池供电,独立的电源滤波轨为逻辑/通信/ CPU供电。三相无刷电机的驱动器是完全定制的,由隐藏在子板下方的Lattice LFXP6C FPGA控制芯片驱动。这三个驱动器电路都各有一个电流传感器、6个全桥配置的大电流FET(通过车体结构冷却)、电机旋转编码器的输入以及大型的4针连接器。
子板通过协调无线模块、成像单元、急停、红外/压力传感器、电源管理和电机驱动器来汇总系统功能。该MCU是32位飞思卡尔MPC5123,具有400MHz时钟,可能运行PowerPC Linux(在裸机上)。这两个以太网端口连接到无线模块和固件闪烁/外部硬线连接,但是它们由Mircel KSZ8993切换。
整个机器人上唯一现成的电路是通信模块:Soekris Engineering Net4526路由器,该路由器具有双天线配置的单个Winstron NeWeb CM9无线模块,并通过以太网连接到主逻辑板。
四、奇妙的举升部件
这一代Kiva机器人有许多引人入胜且执行出色的方面,其中一个突出的部分是举升机构(图12)。这部分机构承担了Kiva繁重的举升任务。它必须能够支撑一千磅的负载,同时要求升降的时候完全平行于地面,滚珠丝杠可以完美的满足这样的要求。大多数滚珠丝杠的直径为1英寸或2英寸,而这里采用的直径为11英寸(注:11英寸=279mm),并且是空心的。
滚珠丝杠的内外壳体是铝合金材质,并且像底盘的主要部件一样,在制造过程中需要进行几次辅助机械加工。这两部分都涂有特氟龙浸渍的阳极氧化膜,这种处理方式很少见,但是在提供润滑性和防锈性方面做得很好。内圈(“滚珠螺母”)装有一个注塑成型的滚珠返回机构,该机构可以回收尼龙/聚甲醛滚珠。在实际的旋转提升过程中,外圈(“螺钉”)与内侧的滚珠轴承以及外侧的小齿轮接合。
由于结构的复杂性,难以准确估算举升机构的成本,根据零件尺寸、后处理、涂层、耐用性的要求和非凡的装配工艺,笔者估计价格在1000美元左右。
五、结论
诚然,本文介绍的内容,是整体解决方案中的一小部分,不过是非常重要的一部分。
在硬件初创领域,我们花大量时间思考和讨论日常生活中的消费机器人,如可以烹饪食物、安排会议时间、给地板打扫卫生的机器人等。不过目前来看,像Kiva这样的机器人已经对我们的日常生活产生了更大的影响。随着电子商务的不断发展,Kiva这样的技术将成为改变仓库和配送中心的驱动力,而这对于满足我们的突破性愿望至关重要。Kiva是为数不多的几家将复杂的硬件和软件巧妙地集成到一个无缝解决方案中的公司之一,并且该公司构建了一个可以显著改变我们购买、销售和生活方式的系统。