风机独立变桨超级电容双向DC-DC变流器仿真研究
2020-03-26赵毅君何浩宇
黄 美,赵毅君,何浩宇
(1.湖南工程学院 电气与信息工程学院,湘潭 411100;2.湖南工程学院 湖南省风电装备与电能变换协同创新中心,湘潭 411100;3.湖南工程学院 风力发电机组及控制湖南省重点实验室,湘潭 411104)
0 引言
风能作为一种新能源,已经被广泛地开发利用,而采用独立变桨的风力发电系统能够有效地利用风能,提高系统发电量[1].目前风机变桨系统后备电源有蓄电池和超级电容器两种方案.超级电容具有高效率、大电流放电、宽电压范围、宽温度范围、状态易监控、长循环寿命、免维护等特点,有效地提高了变桨电源的可靠性、安全性和免维护性.
为了稳定超级电容的输出电压,满足直流母线电压的工作要求,在后备电源超级电容储能系统中常采用双向DC-DC变流器[2].当风力发电系统正常运行时,变流器工作于Buck模式,直流母线相当于一个恒压源,对超级电容充电,将能量存储在超级电容中,以备下次及时启用.当风力发电系统初始运行或电网故障,即直流母线故障时,该变流器工作在升压模式,超级电容深度放电,释放储存的能量并继续为伺服电机供电,变桨伺服系统得以继续可靠平稳工作,在紧急情况下及时顺桨.变桨系统供电图 如图1所示.
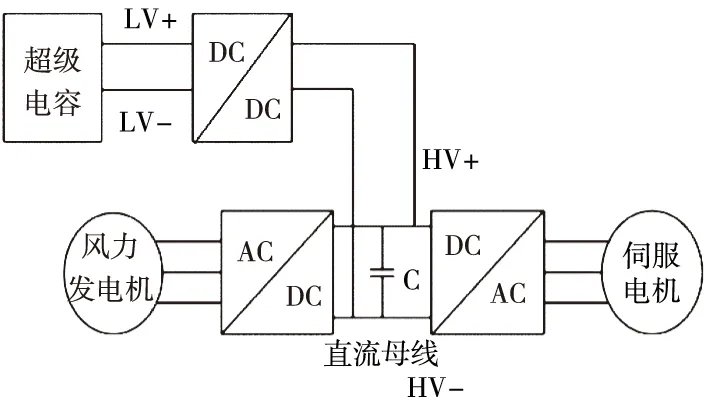
图1 变桨系统供电图
1 基本DC-DC电路
1.1 基本Buck电路
降压斩波电路(Buck Chopper)的作用是在不改变电压的极性的情况下降低输出电压.
其工作原理图如图2所示.
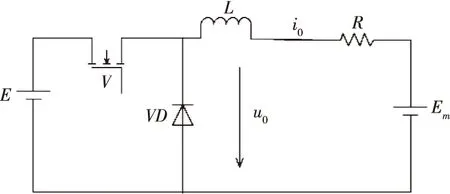
图2 降压斩波电路原理图
1.2 基本Boost电路
升压斩波电路(Boost Chopper) 的设计目的是在不改变电压的极性的情况下提高输出电压.其工作原理如图3所示.
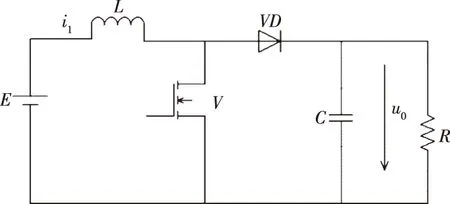
图3 升压斩波电路原理图
2 双向DC-DC电路
2.1 拓扑结构
双向DC-DC变换器有两种模式,降压模式和升压模式.当变流器工作在Buck模式时,双向DC-DC变流器接驱动器一侧为高压侧,即输入端;接超级电容模组一侧为低压侧,即输出端.在Boost模式时,双向DC-DC变流器接驱动器一侧为高压侧,即输出端;接超级电容模组一侧为低压侧,即输入端.变流器只改变高压侧和低压侧的电压大小,但不改变极性[3].是通过改变占空比来控制IGBT1和IGBT2的通断.
双向DC-DC变换器的电路模型如图4所示,主要由IGBT1、IGBT2、二极管D1、D2、D3、电感L、高压侧母线电容C1、C2与低压侧储能超级电容C3和负载、电流霍尔HALL、熔断器F组成.
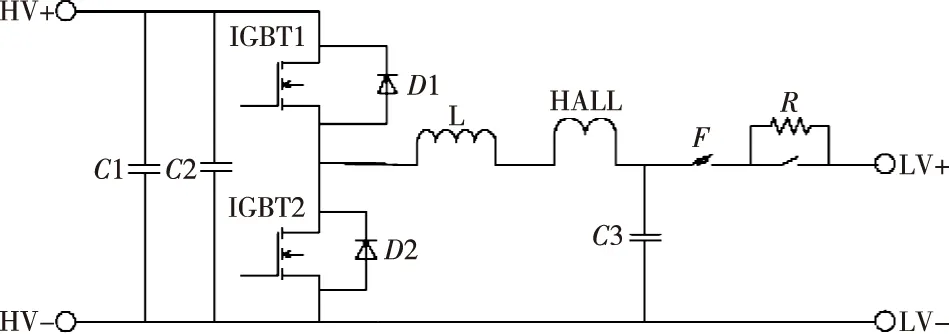
图4 双向DC-DC变换器拓扑结构
2.2 工作原理
图5为Buck工作模式,此时驱动器给超级电容模组充电.
Buck工作模式主要是为了降低输出电压,在此模式下,图示左侧为输入端,右侧为输出端.输出电压低于输入电压.当IGBT1开启时, 设置IGBT2断开,此时驱动器给超级电容模组C3充电,充电一段时间后,IGBT1断开,存储在超级电容模组C3中的能量通过IGBT2的续流二极管D2充电到超级电容模组[4].
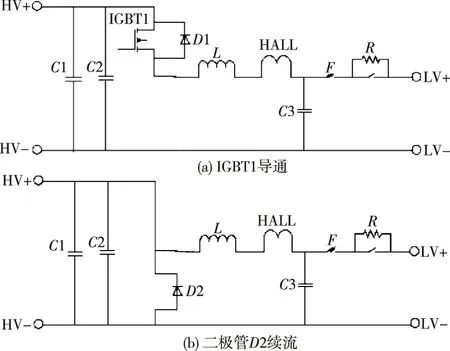
图5 Buck工作模式
图6是Boost工作状态,此时超级电容模组向驱动器提供电能[5].
升压工作模式主要是为了提高输出电压[6].在这种模式下, 图的左边是输出端,右边是输入端.输出电压高于输入电压.当IGBT2导通时,将IGBT1设置为断开,此时超级电容模组释放电能并且储存到超级电容模组C3中,经过一定时间后,IGBT2断开,电容模组C3中储存的电能通过IGBT1的续流二极管D1供给驱动器.
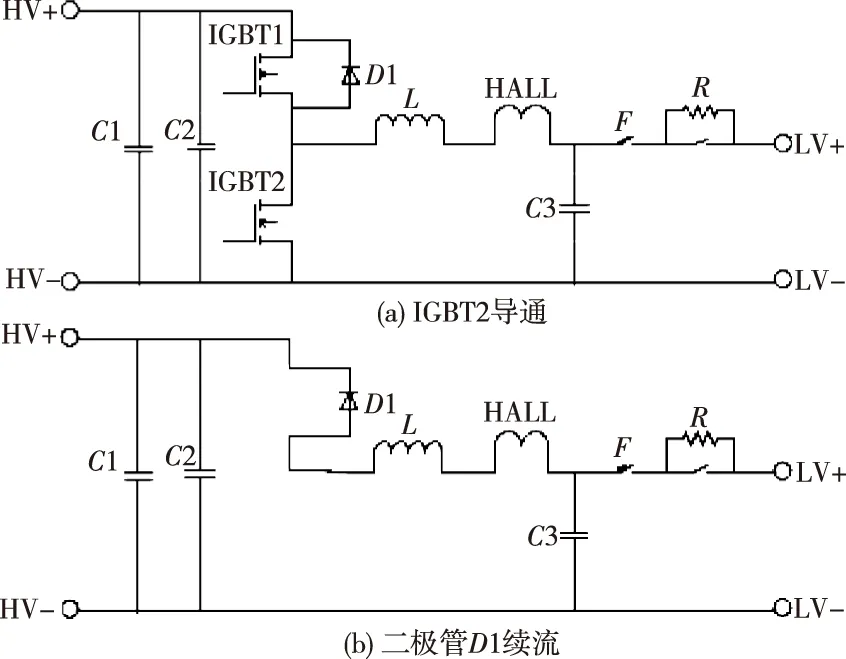
图6 Boost工作模式
3 双向DC-DC控制电路的建模
以连续运行模式(CCM)为例,对DC-DC双向变换器进行小信号扰动开关周期平均值动态建模.分两个步骤进行,第一先建立开关周期动态模型,第二再引入小信号扰动,建立系统的小信号模型[7].
3.1 DC-DC电路的开关周期动态建模
令控制占空比为:
d(t)=D+Dmsinωmt
(1)
占空比扰动幅值Dm远小于稳态值D.且扰动的频率远小于变换器的开关频率,即
ωm≪ωs,ωs=2πfs.
第一步:为建立开关周期动态模型,定义开关周期平均算子为:
(2)
根据开关周期平均算子,可得出各电路元件的开关周期数学模型.
电感:
(3)
电容:
(4)
电阻:
〈uR(t)〉Ts=〈iR(t)〉TsR
(5)
将DC-DC电路中的开关元件看成两端口网络,如图7所示,则开关模型为:
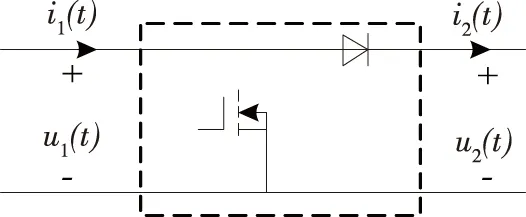
图7 两端口开关网络
令,
d′(t)=1-d(t)
(7)
根据式(1)至式(7)建立的开关周期平均值模型如图8所示.
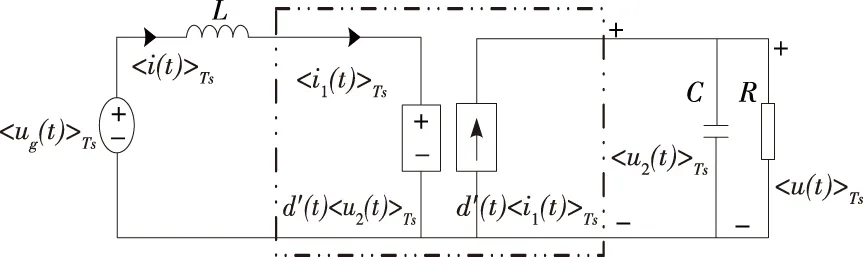
图8 DC-DC双向变换器的开关周期平均值模型
3.2 小信号扰动的DC-DC电路的开关周期动态建模
为得到DC-DC的传递函数,还需对电路进行线性化处理,建立小信号模型.引入占空比“小扰动”,则式(1)的占空比可表示为:
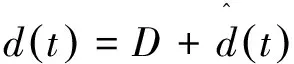
(8)

将式(8)代入图7中两端开关网络的受控电压源与受控电流源中,得到最终的开关周期与小信号模型如图9所示.
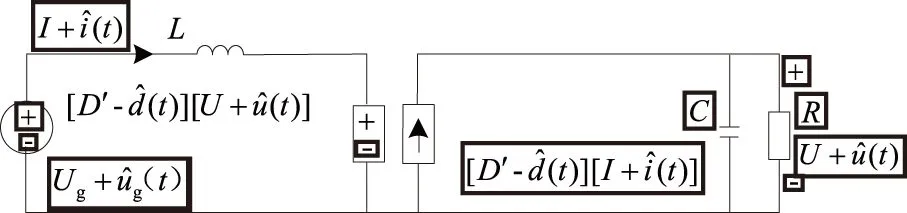
图9 小信号扰动的DC-DC开关周期平均模型
4 系统仿真
4.1 仿真模型
根据双向DC-DC变换器的小信号扰动开关周期平均值模型,采用Matlab仿真,DC-DC双向变换采用PI调节器进行闭环控制.仿真模型如图10所示.
4.2 仿真结果
电路模型主要参数设置如下:
L1:2e-3H;
C1:(R=1e-6 Ohms C=1020e-6F);
C2:(R=1e-6 Ohms C=1500e-6F);
R: 100 Ohms.
首先,为了验证Buck模式的有效性,Buck PI controller控制器模块中的数据设置为:I_PID Buck 模块中P=36,I=0.8,D=0,Filter coefficient=100;I_PID Buck 1模块中P=36,I=0.8,D=0,
图10 仿真模型
Filter coefficient=100;PWM Generator 模块中Frequency=10000 Hz.
设置电路中高压侧电压为600 V,期望低压侧电压值为200 V,设定降压环节PI控制器中KP和Ki的参数,KP=36,Ki=0.8.
先对系统的稳定性进行分析,系统bode图如图11所示,可以看出系统是稳定的,未加PI控制时,虽然稳定,但读取相位稳定裕量为8.53°,明显偏小.引入PI控制后,相位裕量为32.3°,系统的稳定性明显增加.
Buck模式下仿真结果如图12所示,输入电压在600 V时稳定,输出电压在200 V时稳定.输出电压小于输入电压,输出电压在0.13 s内进入稳定,电流在安全值以内,纹波小.即达到了理想的控制效果.
为验证Boost模式下的有效性.设置Boost PI controller控制器模块中数据为:I_PID Boost模块中P=10,I=0.5,D=0,Filter coefficient=100;PWM Generator模块中Frequency=10000 Hz.coefficient=100;V_PID Boost 1模块中P=10,I=0.5,D=0,Filter coefficient=100;PWM Generator模块中Frequency=10000 Hz.
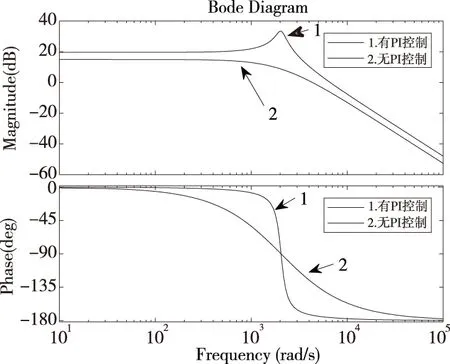
图11 系统稳定性分析
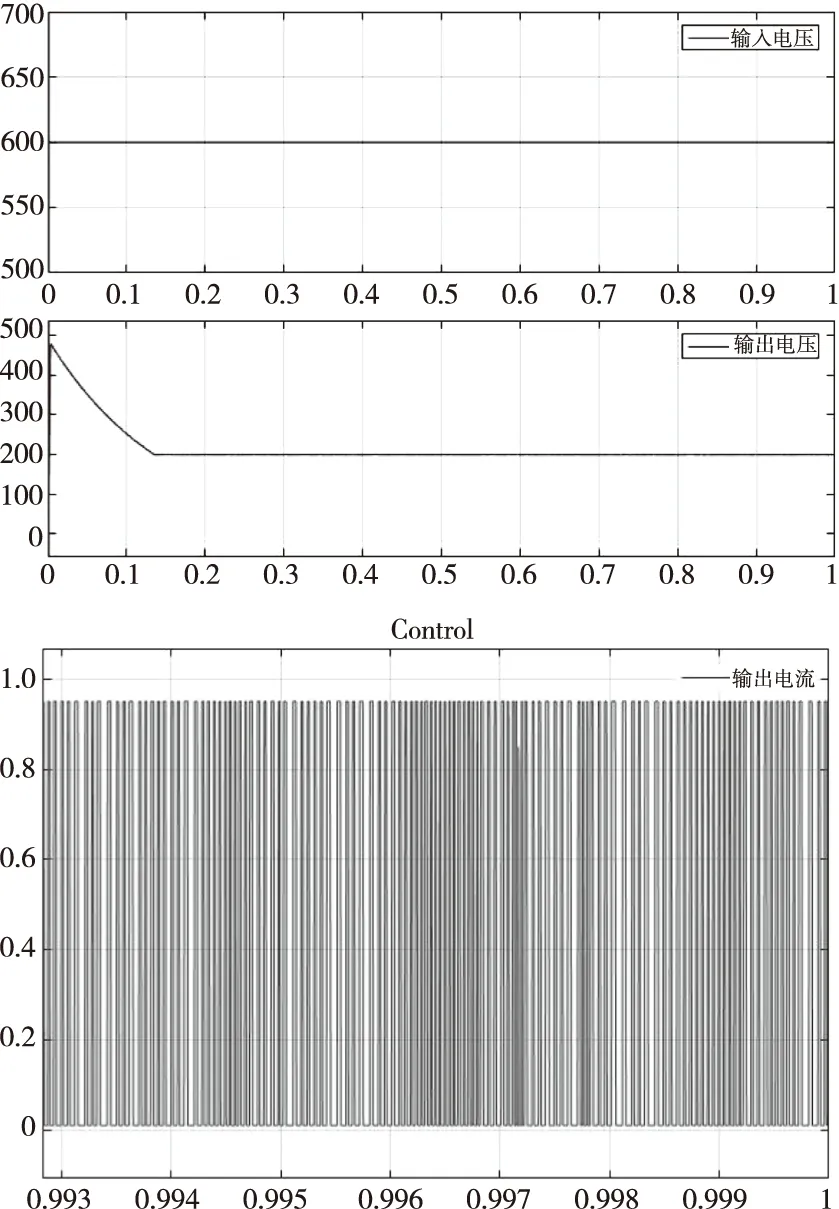
图12 Buck模式下的仿真波形图
设置电路中输入低压侧电压为200 V,期望输出高压侧电压值为400 V,设定升压PI控制器中KP和Ki的参数,KP=10,Ki=0.5.
Boost模式下仿真结果如图13所示,输入电压在200 V时,输出电压在400 V时稳定,输出电压大于输入电压,输出电压0.1 s进入稳定,纹波小.即达到了理想的控制效果.
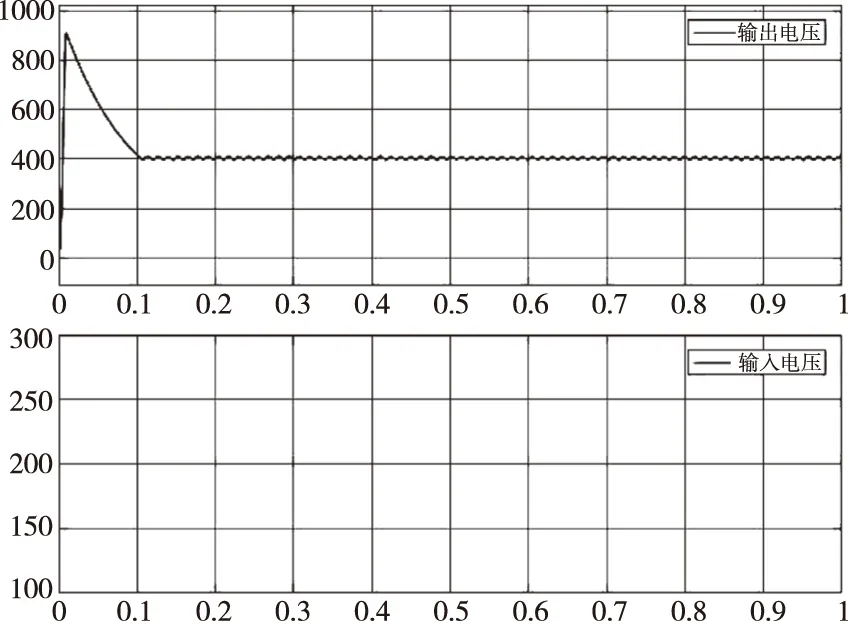
图13 Boost模式下的仿真波形图
5 结语
本文给出了DC-DC变流器应用风机独立变桨系统的超级电容能量的双向能量变换控制,分析了系统的工作原理,即怎样实现驱动器与超级电容模组之间的充放电.并对系统进行了小信号扰动下的平均周期动态建模,采用Matlab对系统进行了无PI控制与有PI控制时的稳定性分析与比较.分别从高低压侧给定输入电压,通过设置PI控制器中的PI参数来获得期望电压,对Buck与Boost两种工作情况验证能量双向PI控制的可能性.通过多次试验得出了最优PI控制参数.仿真结果表明:双向DC-DC变流器能够实现驱动器与超级电容模组之间的充放电,获得了期望的控制效果.