孤岛运行下微电网并联逆变器下垂控制策略研究
2020-03-26邓秋玲向全所柯梦卿
龙 夏,邓秋玲,向全所,柯梦卿,张 群
(湖南工程学院 电气与信息工程学院 风力发电机组及控制湖南省重点实验室,湘潭 411104)
0 引言
随着全球能源互联网的发展,具有微型、清洁、自主和灵活特性的微电网被人们广泛接受,大力发展微电网产业将成为中国未来电力能源战略的重点[1-2].分布式发电一般通过逆变器进入交流微电网系统,微电网系统的稳定性和可靠性将直接受到逆变器稳定性的影响.因此,逆变器的控制策略成为微电网的关键问题之一.微电网逆变器的控制方法一般采用主从控制和对等控制两种控制方法[3-5],主从控制方法已被广泛研究.但是,由于主从控制本身存在缺陷,因此在应用中存在一定的局限性.下垂控制通常表示为对等控制,基于并联逆变器的下垂控制已经广泛用于微电网,因为它能降低对通信可靠性的依赖性,下垂控制策略的研究逐步发展.文献[6]提出微电网的稳定运行可以通过增加无功功率的分配精度来实现.文献[7]提出在基波和谐波域合理分配功率可以提高微电网的稳定性.文献[8]提出了电压和电流控制策略在直流微电网中的应用.文献[9]提出了一种提高微电网稳定性的新方法,但实现过程繁琐.文献[10]提出了一种基于电压电流和双电流控制的下垂控制方法,并通过仿真结果验证了该控制策略的可行性.文献[11-12]在文献[10]的基础上提出引入感应式虚拟阻抗来改善电压和电流的双回路控制策略.仿真结果表明,通过引入感应式虚拟阻抗可以减少系统循环,消除循环系统之间的影响.然而,在文献[13]中没有考虑引入感应虚拟阻抗会导致并联逆变器输出电压下降.文献[14]针对低压微电网提出了一种具有反馈电感阻抗的电压和电流双回路下垂控制方法,并通过仿真验证了控制策略的有效性和正确性,但在逆变器输出电压下降时也未考虑引入感应虚拟阻抗.本文在文献[14]的基础上改进了基于感应虚拟阻抗的电压电流双回路下垂控制策略,并通过仿真验证了该控制策略的有效性和稳定性.
1 传统下垂控制的原理
传统下垂控制方法的思路来源于传统电网中同步发电机的自同步和电压下垂特性.利用传统下垂控制方法中并联逆变器模块之间除了交流母线外没有其他信号线,增强了微电网孤岛运行时的抗干扰能力、冗余能力.目前,逆变器并联系统中有线互联控制技术,无法克服地理位置、受电磁干扰严重、冗余性不佳等先天性的缺点,从而促进了无线互联下垂控制方法在逆变器并联控制领域的发展.目前,该方法广泛应用于隔离微电网逆变器的控制.根据微电网系统实际运行需要,为了简化分析,取2台逆变器构成的并联系统如图1所示,其可以等效为一个电压源和一个阻抗的串联等效模型.
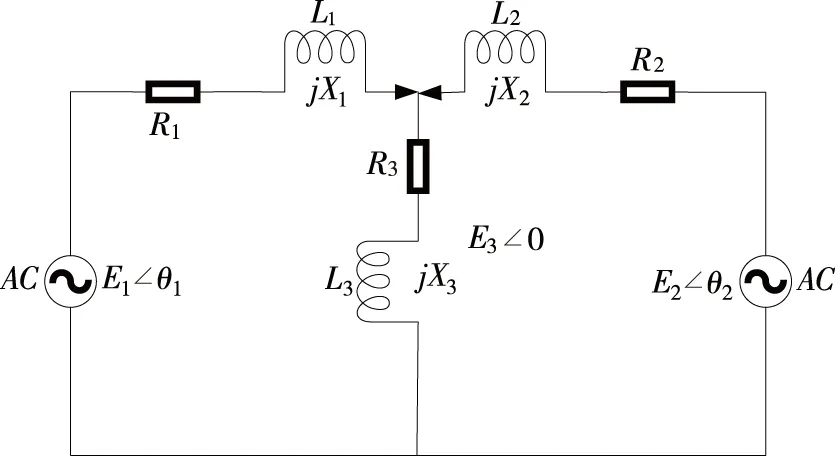
图1 并联逆变器等效电路图
从图1中我们可以得到:
(1)
这里的Pi是有功功率;Qi是无功功率;Zi是阻抗;φi是阻抗角;θi是相角.当X>>R,Z∠θ=X∠90°上述(1)式可简化为:
(2)
通常在传统微电网中,独立微电网并联逆变器系统的输出阻抗和线路阻抗之和是电阻-电感.因此,如果采用逆变器的P/f,Q/V下垂控制策略来控制逆变器,则需要在独立的微电网系统中加入感应虚拟阻抗,使独立微电网并联逆变器系统的输出阻抗和线路阻抗之和呈现感性.
传统下垂控制的特性曲线如图2所示.
结合图2其数学表达式可写为:
(3)
式(3)中:P和Q为DG输出的有功和无功功率;fn、Vn为空载状态下的频率和电压,m是P-f下垂系数;n是下垂Q-V系数.
2 下垂控制的改进
为了满足下垂控制特性的要求,减弱逆变器输出阻抗的影响,提高无功功率的系统分布精度,应引入更大的感应虚拟阻抗值.然而,在实际研究中,感应虚拟阻抗的较大值将导致逆变器输出电压严重下降,如图3所示.当电压和电流双回路控制系统中未添加感应虚拟阻抗时,该等式可写为:
(4)
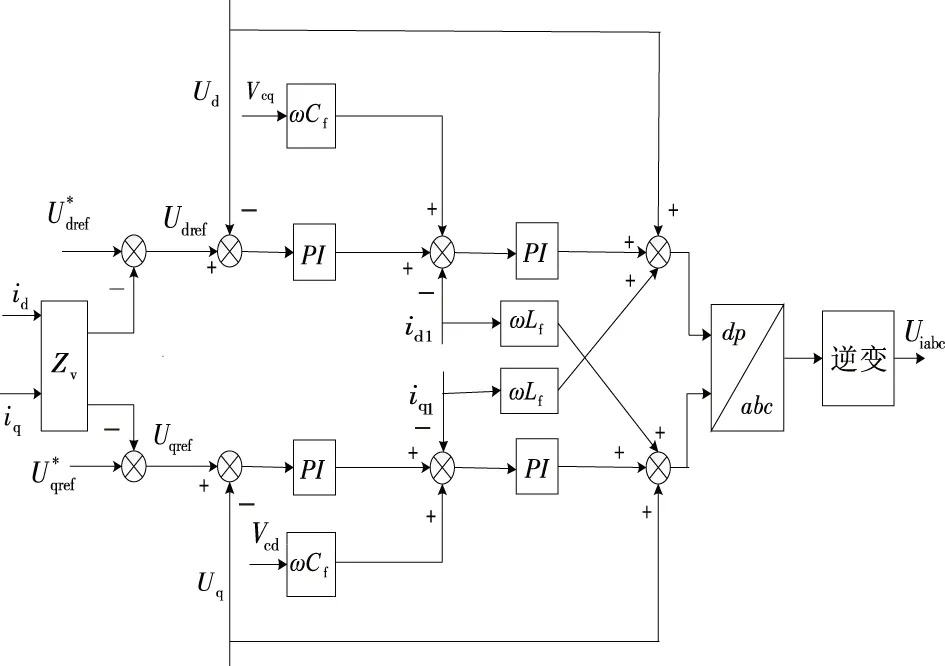
图3 基于虚拟阻抗的电压电流环控制策略
其中U是对应于Q-V下垂控制特性的电压,当在电压和电流双回路控制中引入感应虚拟阻抗时,相应的等式如下:
(5)
添加感应虚拟阻抗之前和之后的Q-V下垂控制特性曲线如图4所示,图4中a曲线表示当微电网控制系统中没有添加感应虚拟阻抗时的下垂控制特性曲线Q-V.
图4中曲线b表示当微电网控制系统中添加感应虚拟阻抗时的Q-V下垂控制特性曲线,由于感应虚拟阻抗的存在,使系统电压下降了,如ΔU表示在引入感应虚拟阻抗后系统电压的下降值.因此,为了保证逆变器输出电压的稳定性,提高电源的可靠性,需要通过补偿回路改善Q-V下垂控制,改进的Q-V下垂控制特性曲线如曲线c所示.添加补偿回路使Q-V下垂控制参考电压合理上升,使得感应虚拟阻抗的引入不会降低变频器的输出电压. 相应的等式如式(6)所示.

图4 引入虚拟阻抗之前和之后的下垂控制曲线
Uref+ΔU=(U+ΔU)-LvI0=(U+ΔU)-
nQ-LvI0
(6)
根据公式(6),可知改进的Q-V下垂控制的控制方案如图5所示.

图5 改进后的下垂控制
3 仿真结果及分析
为了验证所提出的改进下垂控制策略的正确性和有效性,在Matlab/Simulink仿真平台上构建了一个独立的微电网仿真模型,该仿真平台由两个分布式发电机组成,结构模型如图6所示.模拟参数的设置如表1所示,两个分布式电源和逆变器输出阻抗参数设置相同,本文分析了两种情况下两台分布式电源逆变器优化后的下垂控制的仿真.
有两个DG,分别表示为DG1和DG2.K1、K2、K3是控制开关,K4是可以控制系统运行模式的开关.当K4关闭时,微电网以并网模式运行;当K4打开时,微电网以孤岛模式运行.

图6 微电网示意图
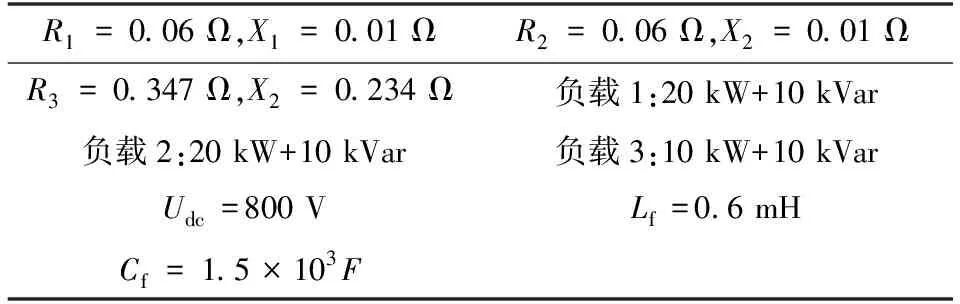
表1 系统参数
情况1:在初始时刻,K2、K3处于闭合状态,K4处于断开状态.在0.4 s的时刻K3断开,此时的微电网系统切除负荷,在0.8 s时刻K3闭合,微电网系统增加负荷.仿真时间为1.5 s,孤岛运行的微电网特性如图7所示.图7(a)分别反映了负载变化时DG1和DG2的有功功率变化.由于两个分布式电源的并联逆变器参数相同,因此有功功率的波动基本相同,结合图7(b)分析表明:系统在0.4 s时切断了负载3的运行,所以DG1和DG2输出的有功功率减少而输出的频率增加.在0.8 s时负载3接入运行,DG1和DG2输出的有功功率增加而输出的频率减少,在微电网系统减少和增加负载的时候,DG1和DG2输出的频率始终维持在50~50.05 Hz的稳定范围内波动,符合P/f下垂控制特性要求.图7(c)反映了负载变化时DG1和DG2的无功功率变化,结合图7(d)中DG1和DG2输出线电压表明,由于在0.4 s切除负载3,DG1和DG2输出的无功功率在0.4 s的时刻降低,而DG1和DG2输出的线电压略微有点增加.在0.8 s的时刻负载3又接入微电网系统运行,DG1和DG2输出的无功功率增加而DG1和DG2输出的线电压略微有点增加.无论微电网系统的负载增加还是减少,DG1和DG2输出的线电压始终维持在220 V左右,满足Q-V下垂特性的要求.
情况2:在初始时刻,K1、K2、K3都处于闭合状态,K4处于断开状态.在0.4 s时开关K1断开,此时的微电网系统切除了分布式电源DG1,在0.6 s时K1闭合,分布式电源DG1又接入微电网系统运行,在0.8 s时K1再次断开,仿真时间为1.2 s.孤岛状态下微电网的运行特性如图8所示.
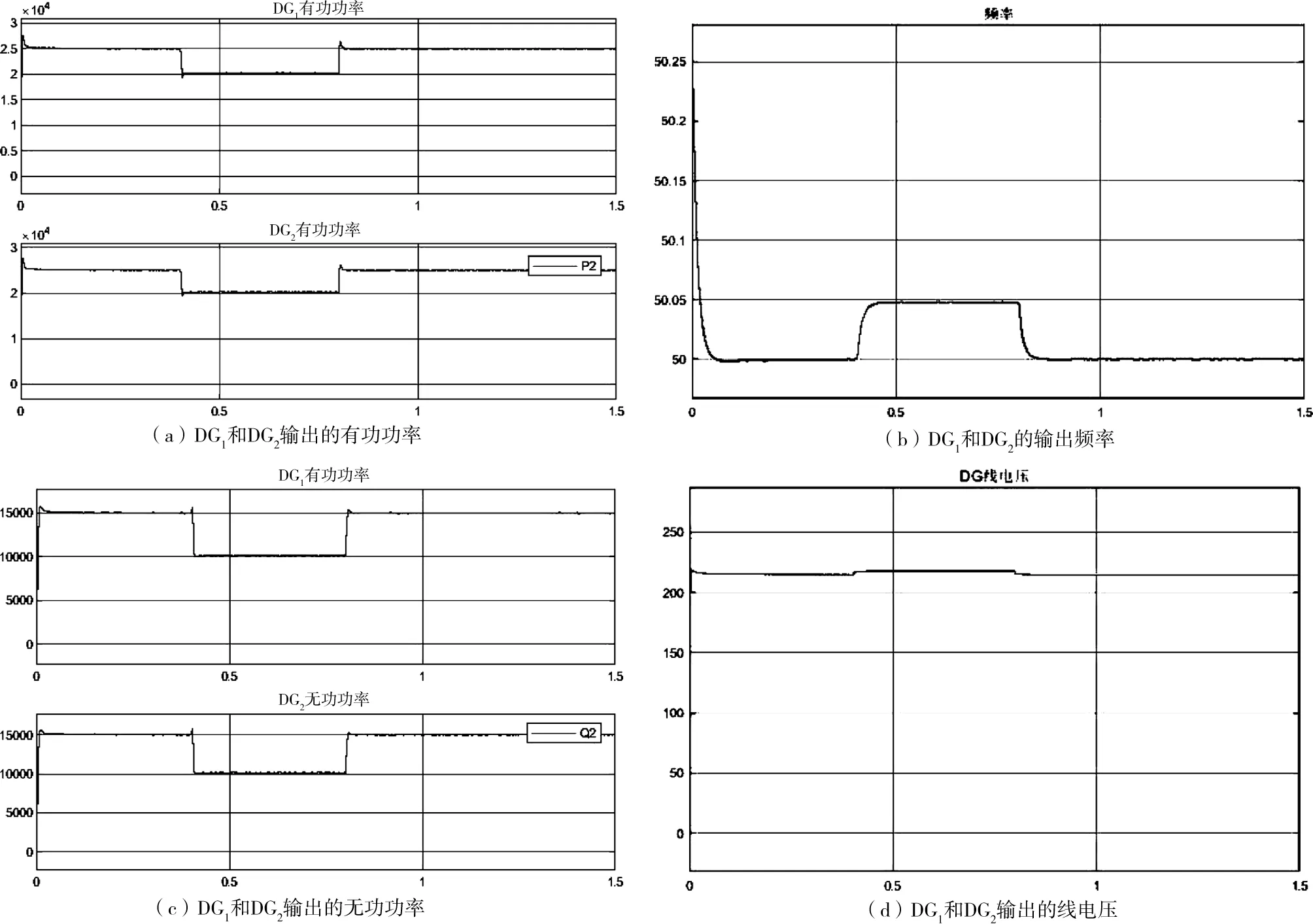
图7 DG1和DG2在切除和接入负载的运行特性

图8 传统下垂控制DG1和DG2输出有功功率和无功功率的变化图
图8显示了传统下垂控制DG1和DG2输出有功功率的变化,图9(a)则是改进后的下垂控制DG1和DG2的输出有功功率的变化.通过对比不难发现,传统的下垂控制在0.6 s时刻,DG1接入微电网系统时有功功率发生了大幅度的波动,势必会引起微电网系统频率的大幅度变化,不利于维持微电网系统的稳定,然而图9(a)显示改进后的下垂控制在0.6 s时刻并没有发生大幅度波动,反而还是维持在稳定的状态.
通过对图8(b)和图9(b)的对比分析,也可以看出在0.6 s时刻,分布电源DG1接入微电网系统的时候,传统下垂控制下的DG1和DG2输出的无功功率发生了波动,改进后的下垂控制则维持在一个稳定的状态.通过对传统的下垂控制与改进后的下垂控制中DG1和DG2输出的有功功率和无功功率的对比,表明改进后的下垂控制的策略可以实现分布式发电的即插即用.从图9(c)和(d)分析可知,当DG1进行切除和并入微电网系统的操作时,独立微电网系统的有功功率和无功率发生了波动,而微电网系统的电压和频率仍然可以保持稳定.

图9 DG1切除和接入独立微电网系统的运行特性
4 结论
在孤岛模式下,频率和电压的波动将由负载的变化引起,导致微电网的不稳定.如果波动太严重,则无法保证系统能够有效地供电,为此通常会使用下垂控制.结合微电网分布式电源系统实际工作情况,考虑并联逆变器系统出现的问题,本文对传统的下垂控制法进行改进,并在文献[14]的基础上改进了一种适用于微电网逆变器并联系统的控制方法,即基于感应虚拟阻抗的电压电流双回路下垂控制策略,并进行了仿真.通过与传统的下垂控制对比表明,改进后的下垂控制策略使得独立微电网的线电压和频率有较好的稳定性,同时更好的实现功率的均分,降低了电网功率波动性.也表明了改进后的下垂控制策略的有效性.
