自移设备列车组控制系统设计
2020-03-26宋涛
宋涛
(1.中国煤炭科工集团 太原研究院有限公司, 山西 太原 030006;2.山西天地煤机装备有限公司, 山西 太原 030006)
0 引言
随着工作面自动化技术的提升,与综掘综采等自动化控制系统及装备相比,煤矿顺槽巷道辅助运输设备仍采用传统人工就地控制,工作效率低;设备自动化控制水平低,设备稳定性差,故障率高,严重威胁着人员安全。例如,在使用顶板单轨吊设备拖动电缆过程中,存在动作时序不匹配,人工操作复杂,设备运行效率低等问题;设备列车仍采用传统回柱绞车牵引方式,安全效率低,同时存在跑车、掉道等隐患。
因此,有必要对顺槽巷道单轨吊及设备列车运输控制技术进行升级改造,提升自动化控制能力,从而实现减人增效。
1 自移设备列车组成
针对传统绞车牵引的设备列车移动方式,太原院自主开发了自带轨道的长距离自动化自移设备组,其结构如图1所示,设备总长度约280 m,总吨位约300 t。该设备由替代绞车牵引的锚固牵引装置、重轨、提升平板车、管缆伸缩装置(替代传统单轨吊牵引)及自动化控制系统组成。

图1 长距离自动化自移设备组结构
该设备列车以工作面的乳化液为动力,随着工作面三机设备的移动同步移动。自移设备列车组高度集成列车轨道列车自移、行走调偏、管缆随动等功能,实现平板车组与锚固牵引牵引装置互为支点交替前移,并采用自动化控制系统实现长约280 m的设备列车的自动化及远程遥控。
2 自移设备列车组控制系统设计
2.1 系统原理
自移设备组总长度约280 m,共控制45台平板车,160个提升油缸,1套锚固牵引装置及后部的管缆伸缩系统。液压控制系统原理如图2所示,系统采用环形供液方式,为保证45台提升式平板车的同步升降,将其划分为8~10各单元子系统联合控制,每个子系统采用1个4功能主阀并联控制同时供液,锚固牵引装置用26功能控制器的控制设备列车立柱、平衡千斤顶、推移千斤顶、抬底油缸的动作,26功能控制器通过电缆信号的传递控制所有子系统4功能主阀的动作,最终实现45台提升平板车的同步升降、牵引的要求。
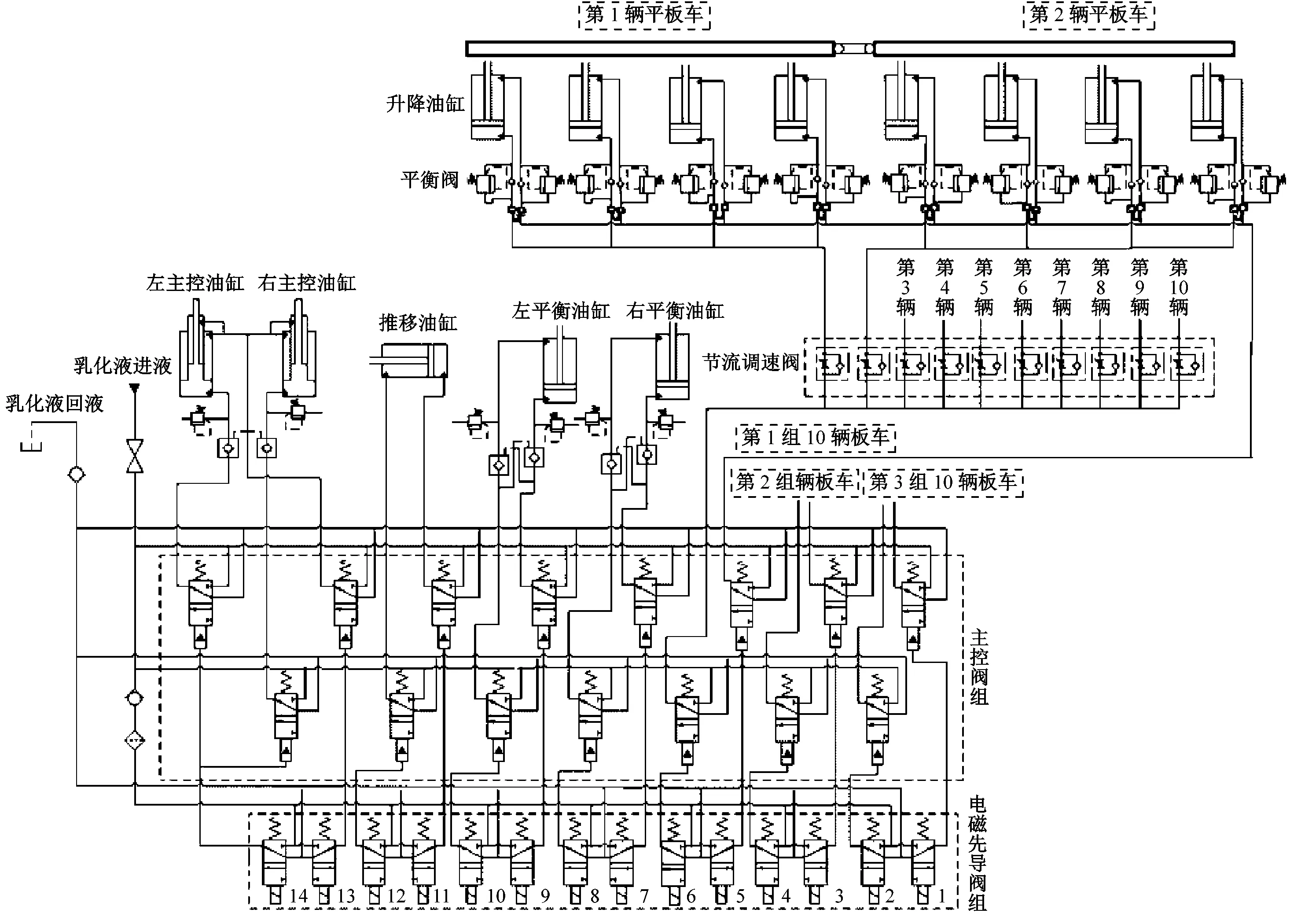
图2 自移设备列车液压控制系统原理
自移设备列车组控制系统由视频监控系统和电控系统两部分组成,如图3所示。系统主要部件为:控制器、电磁先导阀、传感器、无线接收器、遥控器、耦合器、矿用隔爆本安电源、监控主机等。

图3 自移设备列车组控制系统
2.2 控制功能
1) 锚固装置控制。锚固装置通过一个26功能控制器实施所有功能,该控制器与平板车组其它控制器连接构成大系统,锚固装置控制器通过安装的传感器,可显示立柱下腔压力及推移行程。
2) 平板车组的控制。通过26功能控制器控制所有平板车的升降动作,既能顺序控制,又可分组控制,每组平板车控制器通过驱动器控制5对电磁阀,每个阀对应一组车,从而实现对5组车功能控制。控制器通过倾角、压力传感器对平板车进行升降动作及车体监测, CAN总线可实现不同平板车控制器之间时序分组与数据交互。
3) 遥控控制。通过接收器接受信号,可实现自移列车组的全功能遥控,遥控范围覆盖全设备范围,操作者可以站在任意一节平板车前使用手持遥控器操作列车自移,操作的同时观察设备是否按照设定程序动作。
4) 平板车油缸动作异常识别。通过安装的倾角传感器监控平板车姿态,通过安装的压力传感器监控油缸工作状态;当某台车4根油缸未动作,压力不产生变化,系统可识别;当任意3根油缸动作时,车体发生倾斜,系统通过倾角数据可以定位该故障并及时闭锁系统,避免强行推移导致设备损坏。
5) 管缆伸缩承载系统可感知自身系统与刮板机机尾距离。可保证工作面设备推进和设备列车自移的整个作业循环过程中电缆留有余量,并在锚固系统与设备列车间交替动作时,实现二者互锁。
2.3 关键元部件选型
1) 26功能控制器。 26功能控制器是一种专用控制器,它存储并运行程序,执行相应控制动作,具有独特的两类通信接口,执行与其他控制器及主控制计算机互传信息进行数据通信,实现自动控制和监测的功能。主要技术参数为:
额定工作电压/V DC12
工作电流/mA 不大于640
通信端口的传输方式 单线CAN(2路)
输入信号 8通道输入,4路串口通讯
外壳防护等级 IP68(下端)
屏幕显示 中文
2) 矿用压力传感器。用于检测油缸下腔压力,安装在油缸单向阀的测压孔。
有效测量范围/MPa 0~60
输出标准电压信号/V DC0.78~4.94
工作电压/V DC12
3) 矿用本质安全型遥控发射器。遥控器采用便携式设计,可通过接收器接入电液控制系统并实施控制,同时显示控制系统状态。
最大有效遥控范围/m 不小于5
工作电压/V DC3.7
工作电流/mA 150
4) 无线接收器。通过RS-232接口接入控制器,遥控器通过无线接收器与控制器交互信息。
最大有效通信范围/m 不小于5
通信接口 RS-232,Zigbee
工作电压/V DC12
电流/mA 40
5) 对射式超声波传感器。发射器与接收器分体安装,用于测量推移行程。
最大量程/m 3
输出信号/V DC0.71~3.55(可调)
最小误差/cm ±3
6) 矿用倾角传感器。安装于平板车车底,通过RS-232接口接入控制器。
输出接口 RS-232
工作电压/V DC12
电流/mA 80
精度/(°) 0~30:0.1
7) 矿用隔爆兼本质安全型稳压电源。电源箱内含2个独立的AC/DC胶封模块,形成二路独立的直流电源,为电液控制系统供电。
输入电压/V AC100~250
输出电压/V DC12
输出电流/A 2.0×2路
8) 本质安全型综合接入器。用于矿井综合信息接入,包括工业以太网接入、网络摄像仪接入、无线Wi-Fi接入、数据接入等功能。
工作电压/V DC12
工作电流/mA 1 000
输出接口 2路10/100M自适应接口
3 结论
根据现有煤矿顺槽巷道支护及辅助运输设备应用经验,通过技术配套、系统设计及功能验证等环节,将电液控制系统引入到自移设备列车中,可实现电液控制系统在自移设备列车的推广应用,操作人员由适当的15人降至2人,提升了煤矿生产效率和人员的安全性。
