轻量级电驱水下机械臂设计与运动学分析
2020-03-25,,
,,
(西安工业大学机电工程学院,陕西 西安 710021)
0 引言

1 水下机器臂设计
1.1 总体设计方案
本文设计的轻量型水下机械臂安装在小型水下机器人上,设计要求为具有最大工作空间、重量轻、集成度高和体积小。为了满足这些设计要求,采用了关节坐标型结构,以扩大工作空间;选用6061铝合金作为本体材料,以减轻重量;关键零部件采用模块化设计,以提高集成度和减小体积。
本文设计的机械臂为4功能机械臂,包括肩、肘关节的3个旋转自由度与机械手爪的1个抓取自由度。水下机械臂结构上由3个旋转关节和1个手爪组成,其结构如图1所示。其中肩关节安装在旋转底座上,由G1和G2组成,G1关节可绕Z1轴旋转运动,G2关节可绕Z2轴俯仰运动;肘关节G3可绕Z3轴俯仰运动;腕关节G4控制手爪的开合运动。

图1 水下机械臂结构
水下机械臂各关节参数如表1所示。本文提出的水下机械臂主要包括关节、手爪、旋转底座和连接件,下面对其进行详细设计。
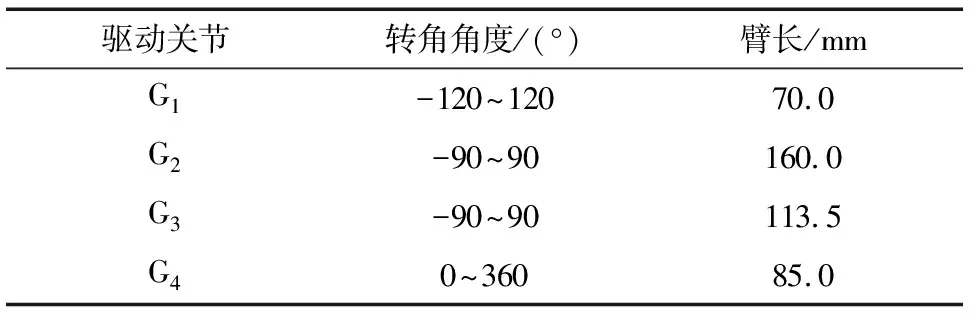
表1 水下机械臂关节参数
1.2 驱动关节模块化设计
为提高水下机械臂的集成度,对水下机械臂的关节进行模块化设计。模块关节主要由伺服电机、减速齿轮组、磁编码器、密封件和外壳组成,如图2所示。其中,伺服电机和驱动器构成动力组件,提供给关节原始动力;减速齿轮组作为传动组件,通过4级齿轮组将力矩传递到输出轴上同时实现降低转速增大力矩的作用;磁编码器的磁栅固定到输出轴的尾端,用来检测关节轴的位移与速度;密封件分为静密封与动密封,静密封采用氟橡胶密封圈,同时在关节走线孔中灌封环氧树脂AB胶,动密封采用泛塞封圈,安装在与输出轴同轴线的沟槽中来密封旋转轴,防止发生泄露对电路系统造成损坏;外壳采用6061铝合金材料,表面进行阳极氧化处理,用来固定内部零部件,同时要具备耐压防水和保护内部零件作用。
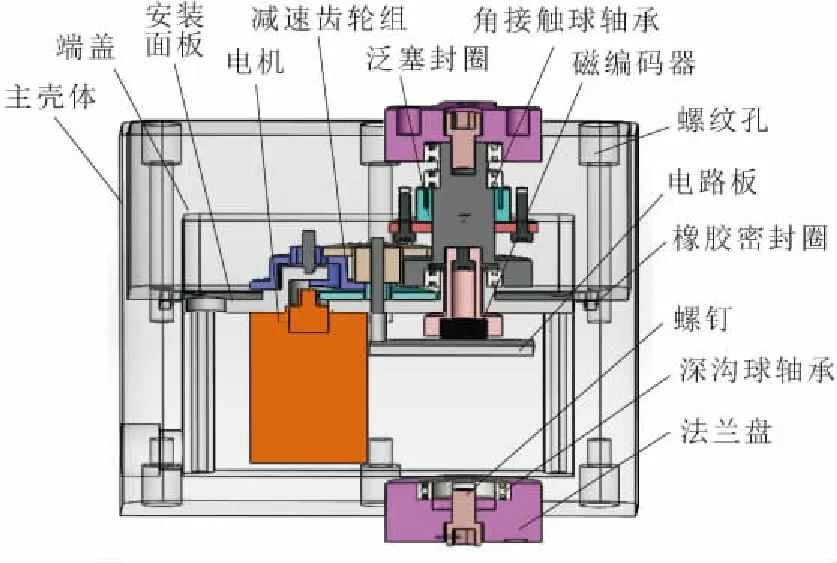
图2 模块关节总装图
驱动关节的密封性是水下机械臂最为关键的部分,在完成整体结构设计后,对关节样机进行了密封测试,如下所述。
a.静密封测试:如图3所示,将装配好的驱动关节在水槽中静置10 h,取出通电后正常启动运转,无漏水现象。
b.动密封测试:驱动关节在水中分别正反转动1 h,一直运转正常,未发生漏水现象,证明本文设计的驱动模块结构合理,密封性能良好。
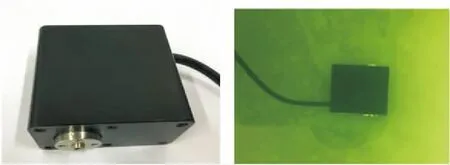
图3 模块化关节样机及密封测试
1.3 手爪设计
手爪为水下机械臂末端的执行器,实现水下物体的抓取功能。如图4所示,本文设计了两指平移对捏式机械手爪。驱动电机输出法兰带动丝杆转动,丝杆上的移动螺母可在丝杆上做直线往复运动,移动螺母通过手指拉杆带动手指的张开与闭合。手指上预留有螺纹孔,可在手指上安装压力传感器,提高手指抓取的准确性与可靠性。

图4 手爪结构
1.4 旋转底座设计
旋转底座的作用是将水下机械臂固定在水下机器人上。本文设计了水下机械臂旋转底座,驱动电机法兰盘与底座旋转盘通过螺栓固定,电机转动带动旋转盖转动,如图5所示。同时在轴承座上安装2个角接触球轴承为驱动电机的输出轴分担载荷,防止输出轴承受载荷太大影响动密封性能。

图5 旋转底座
1.5 连接件设计
连接件的作用是将模块化关节、手爪和旋转底座等部件连接起来,构成完整的机械臂,并起到模块关节化扭矩的传递作用。连接件材料选用6061铝合金,各臂杆通过螺栓与关节外壳或关节输出法兰盘连接,结构如图6所示。

图6 水下机械臂连接件
1.6 机械臂总装及样机
如图7a所示,完成零部件设计后,在SolidWorks软件环境下对水下机械臂进行了虚拟样机装配,并以此为基础,完成了如图7b所示样机的加工。
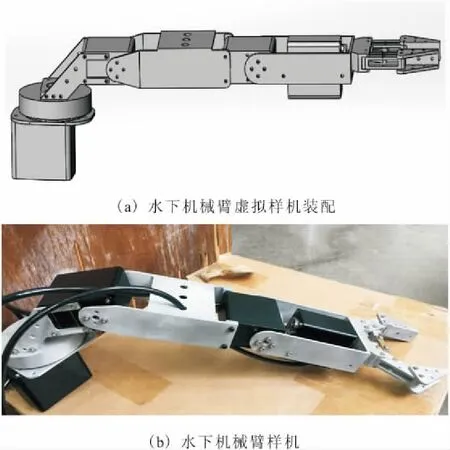
图7 水下机械臂虚拟装配与样机
2 水下机械臂结构分析
2.1 强度校核
水下机械臂在水下工作时,负载最大且处于水平伸展状态时最危险,需在此工况下校核强度。本文采用ANSYS软件进行强度校核,在强度校核前需对导入的水下机械臂三维模型进行简化处理,将螺纹、小尺寸圆角等微小结构去除,将复杂结构部件等效为与其尺寸相符的实体,以提高网格划分的质量与效率且对仿真结果影响较小。导入模型后将装配体相互接触的部件进行绑定,完成各部件的材料定义,对其进行网格划分。选机械臂旋转底座面为约束面;由于本文提出的水下机械臂最大抓取质量为1 kg,因此在手爪处施加竖直向下载荷,大小为10 N,仿真得到如图8所示的机械臂在危险工况下的总变形云图和如图9所示的等效应力分布云图。由仿真结果可知,最大变形集中在手指处,变形值为0.461 mm,不会对水下机械臂工作造成影响, 机械臂的最大应力分布在旋转底座的支架和手爪腕部,应力值为26.187 MPa,远小于材料的屈服强度275 MPa。因此,水下机械臂的静态特性较好,不影响机械臂的工作。

图8 水下机械臂总变形云图
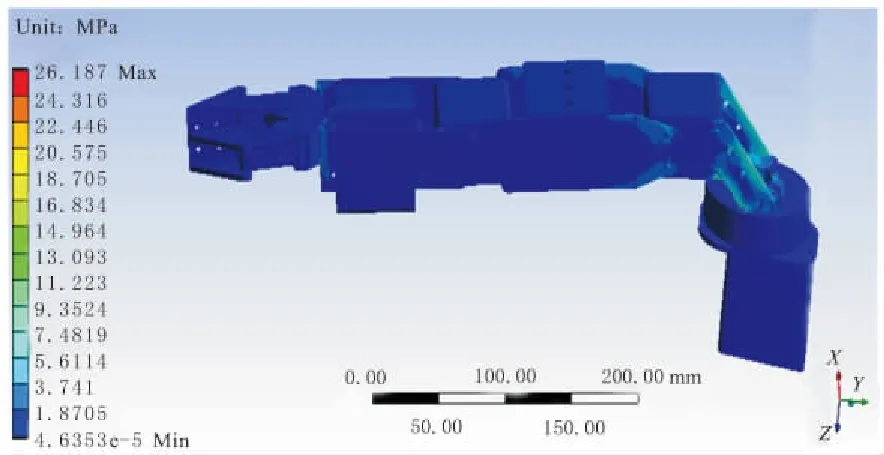
图9 水下机械臂等效应力云图
2.2 模态分析
机械臂在水下作业时可能会受到其他机构产生动载荷的影响,当机械臂的固有频率与激振源电机的频率相同时,会引起共振现象,严重影响机械臂的稳定性和精度,因此有必要对水下机械臂进行模态分析。由于激振源属于低频振动,只需分析水下机械臂的前几阶振型即可。表2为通过ANSYS软件计算得到的水下机械臂的前6阶固有频率及振型特点。

表2 机械臂的固有频率及振型特点
水下机械臂前6阶振型结构不稳定,共振引发危险的机构主要集中在小臂与末端执行器部位。由图10可知,前2阶振型是机械臂水平部分的弯曲振动,且对手指的振动变形影响较大,第3阶振型主要是小臂的弯曲振动,后3阶振型特点为弯曲与扭转的组合震动,其中第4阶与第6阶振动有较大的振动变形。当水下机械臂发生共振时,小臂与机械手会受到严重影响,应适当增加其强度与刚度。水下机械臂受到的主要激振源为驱动关节电机,其转动产生的振动有可能会引起水下机械臂的共振,因此应使得前6阶固有频率不要与电机激振频率相等或接近,避免共振带来的损害。

图10 水下机械臂前6阶振型
3 水下机械臂运动学分析
3.1 D-H模型建立
运动学分析是进行运动控制的基础,其前提是运动学模型的建立。水下机械臂为串联结构,可采用D-H法建立其运动学模型。设坐标系{i}与连i杆固连,坐标系{i+1}与连杆i+1固连,则根据D-H坐标变化法则,可得相邻连杆的坐标系变换公式为[8]
(1)

(2)
3.2 正运动学分析
根据3.1节的建模方法建立水下机械臂坐标系,基坐标系O0-X0Y0Z0固连在基座,末端手爪与小臂末端固连到一起,机械臂连杆参数如表3所示。
表3中,a1=70.0 mm,a2=160.0 mm,a3=5.0 mm,d1=30.0 mm,d4=198.5 mm。

表3 水下机械臂连杆参数
将表3中的参数分别代入式(1)和式(2)中,可得机械手爪坐标系{4}相对于基坐标系{0}中的位姿变换矩阵为
(3)
式(3)矩阵中各元素为
(4)
其中,c1,c2表示cosθ1,cosθ2,s1,s2表示sinθ1,sinθ2,c23表示cos(θ2+θ3),s23表示sin(θ2+θ3),后同;n为末端执行器法向量;o为末端执行器的方位矢量;a为末端执行器的接近矢量;P为末端手部相对于基坐标的位置矢量,P=[pxpypz]T。
3.3 逆运动学分析

(5)
由于在式(5)中,d1,d4,a1,a2,a3已知,则式(5)可以看作为以θ1,θ2,θ3为未知数的超越方程组。根据表3中θi的取值范围,可以确定θ1,θ2和θ3的唯一解为
(6)
式中,a=py/s1-a1,b=d1-pz,φ=arctan(a3,d4),ψ=arctan(a,b)。
3.4 工作空间分析
所谓工作空间指的是机械臂在各关节运动范围的限制下,此时末端执行器能够到达的全部离散位置在三维空间中形成点的集合,是运动学分析的重要内容。为此,在研究机械臂的正运动学的基础上,采用蒙特卡洛方法并借助MATLAB软件对机械臂作业空间进行分析。蒙特卡洛法是一种借用随机变量统计来计算数学问题的模拟方法。它是以机械臂正运动学为基础对机械臂工作空间进行求解,通过对机械臂各关节转角范围随机采样计算,求解末端执行器的相应位置。计算步骤如下:
a.根据式(4)得到机械手爪相对于基坐标系的位置P=[pxpypz]T。

c.将机械臂各关节随机角度θi代入到P=[pxpypz]T中,分别计算出θi所对应的机械手爪位置。这样就得到了机械臂的关节角度变量到执行器空间位置的映射,即为机械臂工作空间。
设定循环次数N=10 000,使用MATLAB软件,可通过图形来表示机械臂手爪的可达工作空间点的集合,如图11所示。为了更直观地看到机械臂在各平面内的工作区域,分别绘制了工作空间在各个平面投影图,如图12为XOY平面投影,图13为XOZ平面投影,图14为YOZ平面投影。
由图11可知,水下机械臂的有效工作空间为半椭球体,由于水下机械臂安装本体(如水下机器人)附近不能到达,椭球体存在开口,但球体内不存在空心,说明其关节的转角范围及连杆参数的设置合理。
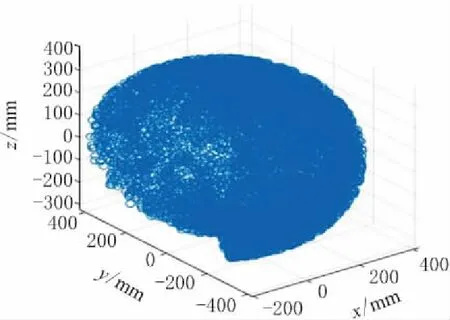
图11 三维工作空间图
根据二维工作投影图可知,机械臂在XOY水平面的作业范围435 mm×435 mm,在Z轴方向的俯仰距离为370 mm。因为蒙特卡洛法是随机获取关节角度值,只有随机值越多工作区域越接近真实值。
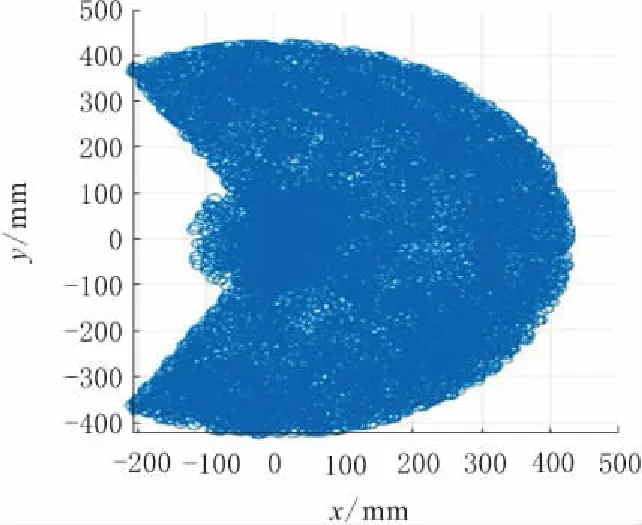
图12 XOY工作空间投影

图13 XOZ工作空间投影
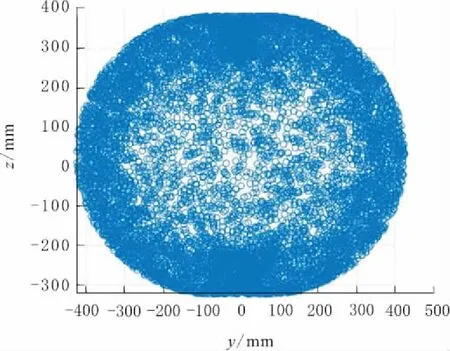
图14 YOZ工作空间投影
4 结束语
本文设计了一种4功能水下机械臂,包括旋转底座、大臂、小臂和机械手爪,具有3个旋转自由度和1个抓取自由度。设计了模块化驱动关节,以提高系统的集成度和减小系统的体积。密封试验结果表明,所设计的模块化驱动关节结构合理、密封性能良好。
对水下机械臂进行了结构分析,强度校核结果表明水下机械臂的静态特性较好,不影响机械臂的工作。模态分析结果表明,水下机械臂前6阶振型结构不稳定,共振引发危险的机构主要集中在小臂与末端执行器部位,应使得前6阶固有频率不要与电机激振频率相等或接近,避免共振带来的损害。
采用D-H法建立了水下机械臂的动力学模型,并进行了逆运动学和正运动学分析。在正运动学的基础上采用蒙特卡洛法得到了水下机械臂的工作空间。水下机械臂的有效工作空间为存在开口的半椭球体,但球体内不存在空心,说明其他关节的转角范围及连杆参数的设置合理。
