基于图像识别模板匹配技术的工业检测系统设计
2020-03-25张建渊
张建渊
(重庆川仪速达机电有限公司,重庆 400700)
0 引言
随着嵌入式处理器性能的提高以及图像识别技术的发展,可以对工业设备输出的图形和字符进行识别,再与模板图片进行匹配检测,可以达到良好的识别效果,能有效地检测出工业设备的输出字符是否正确,从根本上杜绝了原来需要人为判定导致的漏检、错检的现象。
目前图像识别技术方面有霍夫Hough 变换法、模板匹配法[1]、中心投影法、减影法。本文以检测工业记录仪的液晶屏为例,识别其静态字符特点。因此,选用了更易操作、提取特征效果好的模板匹配法来提高检测效率。
1 检测系统硬件设计
1.1 系统构成
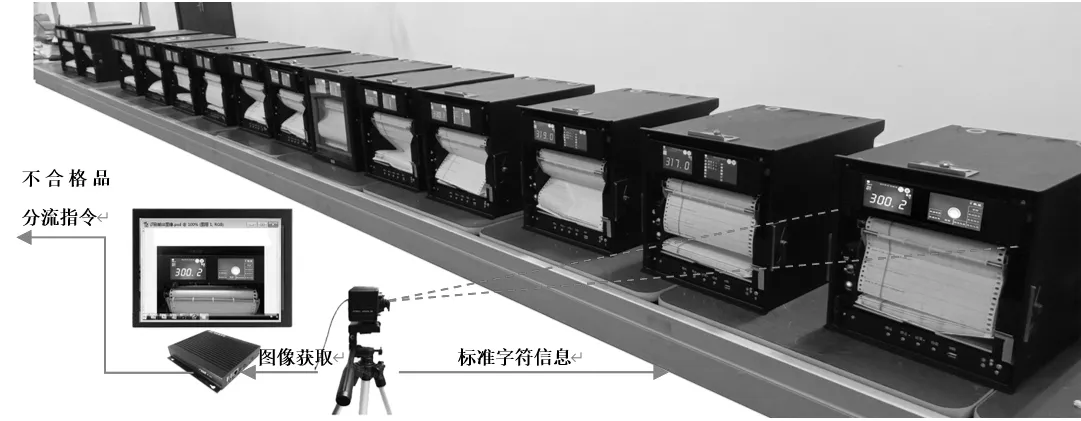
图1 检测系统构成图Fig.1 Composition of detection system
本系统由控制器、摄像头、显示器、检测软件等部分构成。考虑现场安装方便,选用的控制器主控板是基于ARM Cortex-A9 架构的主控板,主频1.6GHz,1GB 双通道DDR3,4GB 固态硬盘EMMC 存储,系统为Linux 嵌入式操作系统+Qt 文件系统+视觉库OPEN-CV,能满足图像识别高速运算和大容量存储的需求。
1.2 检测系统工作原理
控制器通过通讯口发出标准字符信息给工业智能记录仪,记录仪在其液晶屏上显示相应的温度数据字符,字符数据由温度阿拉伯数字、温度单位、中文通道号组成,摄像头采集的记录仪液晶屏的字符图像传输给主控板,通过调用OPEN-CV[2]中特征点匹配算法,找到相对应的内置的字符图片,来判断该记录仪输出字符是否正确,最后发出控制指令分流不合格品。
2 检测系统软件设计
2.1 基于模板匹配法算法描述
为了检测待识别图像的某些区域特征而设计的阵列,这些阵列是将模板图像分解为一系列的数字量和符号串。把已知物体的模板与图像中所有未知物体进行比较,如果某一未知物体与该模板匹配,则该物体被检测出来,并被认为是与模板相同的物体。
为提高图像匹配的鲁棒性和快速性,将图像进行几何变换,采用了霍夫变换HT 法,它把图像中给定形状曲线上的所有点变换到霍夫空间而形成峰点,这样给定形状的曲线检测问题就变换为霍夫空间中峰点的检测问题。
2.2 字符图像识别过程
图像识别过程分为图像处理和图像识别两个部分。
2.2.1 字符图像预处理
因字符图像是彩色的,含有噪声点或位置倾斜,为了便于分割和特征比对,所以需要进行去噪、二值化、倾斜校正、归一化等方面的预处理。先将英文字符预置为标准的16×8 的二值化模板,中文字符预置为标准的16×16 的二值化模板。

图2 字符图像识别过程图Fig.2 Character image recognition process

图3 字符图像预处理过程图Fig.3 Process of character image preprocessing

图4 字符图像特征提取与判别过程图Fig.4 Process chart of character image feature extraction and discrimination
1)调用OPEN-CV 函数imread()函数,加载原始图片,并截取需要检验的区域的字符,再用cvCvtColor(img, source,CV_BGR2GRAY),转化成灰度图像。
2) 调 用OPEN-CV 函 数cvThreshold(source,source_gray,100,255,CV_THRESH_BINARY ),进行二值化处理生成黑白图。
2.2.2 字符图像特征提取与判别
特征提取算法主要有SIFT 与SURF 算法,SIFT 在搜索正确的特征点时更加精确。SURF[3]算法描述大部分基于强度的差值,计算更加快捷。根据实际工况,选取了更为快捷的SURF 算法。流程如图4。
设置与模板的匹配点数大于55 时,则判定图像输出合格。当记录仪的图像字符合格时,通过索引内置图片模板,成功找到了字符为“300.2”的模板图片与模板的匹配点数大于55,实际检测结果为61。
而当记录仪输出的字符图片不合格时,如“300.1”与实际要求“300.2”有偏差,其匹配点数也明显小于55。与模板的匹配点数检测结果为42,无法找到字符为“300.2”的模板图片。

图5 特征匹配合格结果图Fig.5 Qualified result of feature matching
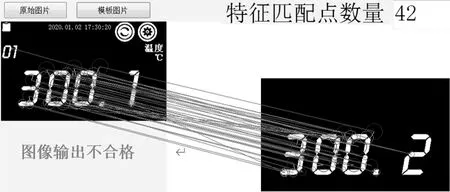
图6 特征匹配不合格结果图Fig.6 Unqualified results of feature matching
3 结论
通过该图像识别系统,能有效地检测工业设备字符图像输出合格与不合格状态,杜绝了人工检测低效、易错的问题,通过拓展控制器的分流指令,控制生产线流转,还能实现该工位无人值守,大大提高生产线运行效率。
