PMSM分数阶模型参考自适应调速系统研究
2020-03-25任金霞黄艺培蒋梦倩
任金霞,黄艺培,蒋梦倩
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
永磁同步电动机(permanent magnet synchronous motors,PMSM)由于其高效率、低惯性和高转矩惯量比等高性能特性而在工业中得到广泛应用。在许多应用中,PMSM的快速响应和高精度转速控制都是重要的技术指标。
永磁同步电机一般用传感器来检测转子的位置和转速,但这会降低永磁同步电机的鲁棒性。在很多环境下,传感器并不可靠,反而会增加系统的复杂性并可能导致电磁干扰问题,无传感器方法则可以避免这些问题。目前有许多估计永磁同步电机转速的技术方法,如高频注入法和扩展卡尔曼滤波器(EKF)技术。但是这些技术方法的使用都要经过大量复杂的信号处理运算,这增加了计算的难度和系统的复杂度。通过分析发现,模型参考自适应控制(model reference adaptive control,MRAC)技术能够有效地解决这些问题。MRAC是用于估算转子速度和位置最好的技术之一,由于其在性能方面需要较少的计算时间,因此易于实现。但是MRAC一般适用于低速且精度要求不高的场合[3]。
为提高系统的鲁棒性,本文提出将分数阶理论应用于模型参考自适应系统中,在同步旋转坐标系中根据PMSM的电流方程建立可调模型和参考模型,并以参考模型和可调模型的d-q轴电流差值作为误差,转速作为可调参数,根据分数阶Lyapunov稳定性理论设计分数阶自适应律。在MATLAB/Simulink环境下进行仿真实验,实验结果显示,分数阶自适应律应用于模型参考自适应系统具有明显优越性。
1 分数阶微积分
分数阶微积分实际上是任意阶微积分,阶数甚至可以为复数[4]。分数阶微积分算子定义为
(1)

在分数阶理论的发展过程中,出现了多种定义,最常见的R-L分数阶积分定义为

(2)
式中:t>0,α∈R+;Γ(α)为Gamma函数,

(3)
2 PMSM模型参考自适应系统
本文以永磁同步电机的电压和电流作为自适应控制系统的输入,根据参考模型和可调模型的输出电流误差得到转速误差信息,由此设计分数阶自适应律。分数阶MRAC设计框图见图1。

图1 分数阶MRAC设计框图
2.1 参考模型和可调模型
表贴式三相PMSM在同步旋转坐标系下的电压方程为
式中:ud,uq,id,iq分别为同步旋转坐标系下定子的d-q轴电压和电流;Ls为d-q轴定子等效电感;ωe为电机转速;ψf为磁链;R为定子电阻。
将式(4)写成电流方程的形式:

(5)
令
则式(5)可变换为
(7)
式(7)可简写为

(8)
将式(8)写成状态空间表达式
(d/dt)i′=Ai′+Bu′,
(9)
式(9)中的状态矩阵A包含转子速度信息,因此可将此式作为可调模型,ωe为可调参数,三相PMSM为参考模型。
将式(8)以估计值表示为

(10)
式(10)可简写为
(11)

(12)

将式(12)写成
(13)
2.2 分数阶Lyapunov稳定性理论
考虑到电机中的电容和电感都具有分数阶特性,引用文献[5]中的分数阶Lyapunov稳定性定理,此处不再证明。

2.3 分数阶自适应律的设计

则式(13)可表示为

(14)
设计Lyapunov函数为
(15)
其中,系数γ>0。
对式(15)求α阶导,得

(16)
(17)


(18)

令p为单位阵,则
可得
设KI=γ,为提高系统的响应速度,引入比例环节,则
(21)
3 仿真实验与结果分析
按照图2所示的PMSM无传感器矢量控制框图,在MATLAB/Simulink环境下搭建仿真模型。其中,电机的仿真参数如表1所示。

图2 基于分数阶MRAC的PMSM矢量控制框图
将自适应律的参数值设为KI=0.5,KP=0.3,α的取值约束在[0.1,1]间,经过多次实验,发现当分数阶次取α=0.1时,能取得较好的控制效果。为了分析分数阶模型参考自适应系统具有的动态性能和稳态性能,与传统整数阶模型参考自适应系统得出的仿真结果进行对比如下。
3.1 电机在空载状态下的响应
电机在空载状态下启动,给定转速为300 r/min,仿真结果如图3和图4 所示。
3.2 转速突变时的电机响应
电机在空载状态下启动,给定转速为300 r/min,在0.3 s时转速突变为650 r/min,仿真结果如图5和图6所示。
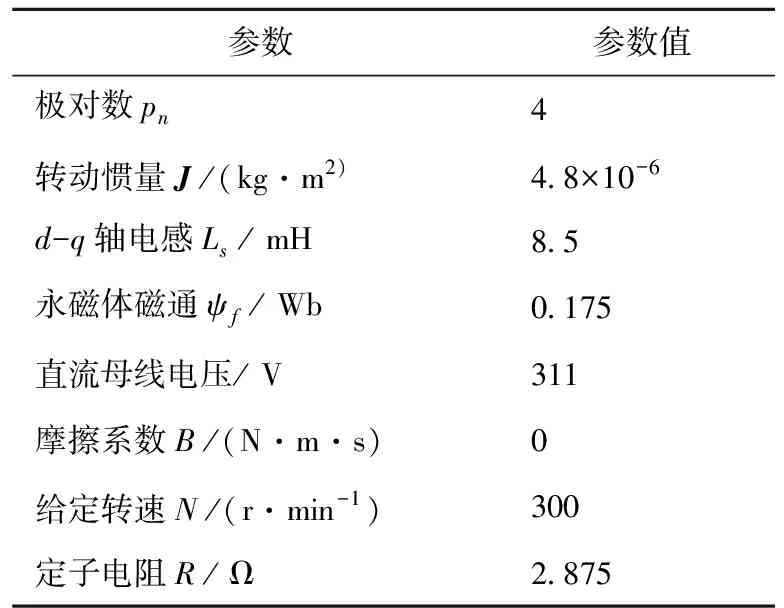
表1 电机仿真参数
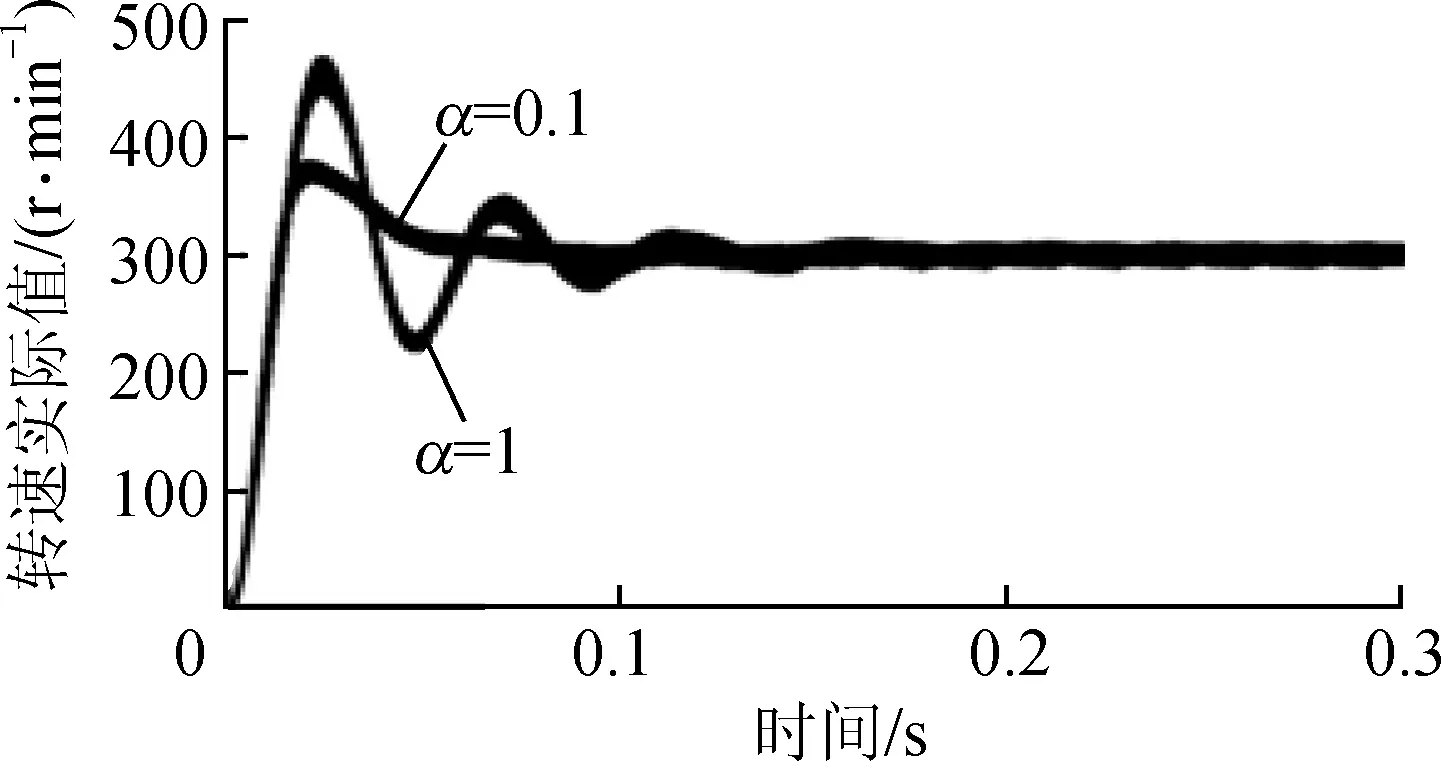
图3 电机实际转速

图4 电机转速估计误差
3.3 加入5 N负载时的电机响应
电机在空载状态下启动,给定转速为300 r/min,在0.3 s时加入5 N负载,仿真结果如图7和图8所示。
从图3和图4中可以看到,对于PMSM的转速实际值,当α=0.1时电机转速能够快速响应,且相比于整数阶,有较小的超调量,调节时间短,在0.05 s左右能快速达到稳定状态,而整数阶情形下则需要0.18 s左右达到稳定状态。在分数阶情形下,系统进入稳定状态的时间仅为整数阶情形下的27.8%。
从图5~6中可以看到,在转速突变的情况下,α=0.1时电机转速可快速达到650 r/min,能够在0.36 s左右迅速达到稳定状态,并且在转速突变时,转速估计误差稳定在10 r左右。而当α=1时,电机在0.4 s左右才能进入到稳定状态,

图5 转速突变时电机实际转速
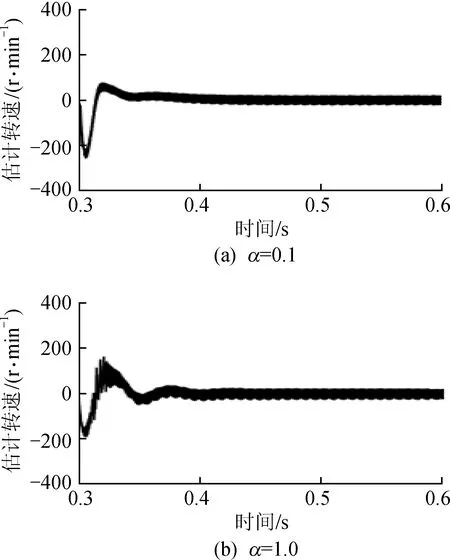
图6 转速突变时电机转速估计误差
耗时较长,且转速估计误差稳定时抖动较大,为20 r左右。在分数阶情形下,系统进入稳定状态的时间提高了50%,转速估计精度提高了50%。
从图7~8中可以看到,当系统加入负载时,在整数阶情形下,电机实际转速会受到较大的扰动,在0.3 s时最大转速为470 r左右。而当α=0.1时,电机实际转速受到的扰动较小,在0.3 s时最大转速为400 r左右,然后迅速回到稳定状态,最大转速估计误差降低了29.4%,有较强的抗扰动能力。
从以上仿真结果可以看出,相比于整数阶自适应律情形下,PMSM在分数阶自适应律情形下调速性能得到了提高,有较好的鲁棒性。

图7 加入负载时电机实际转速
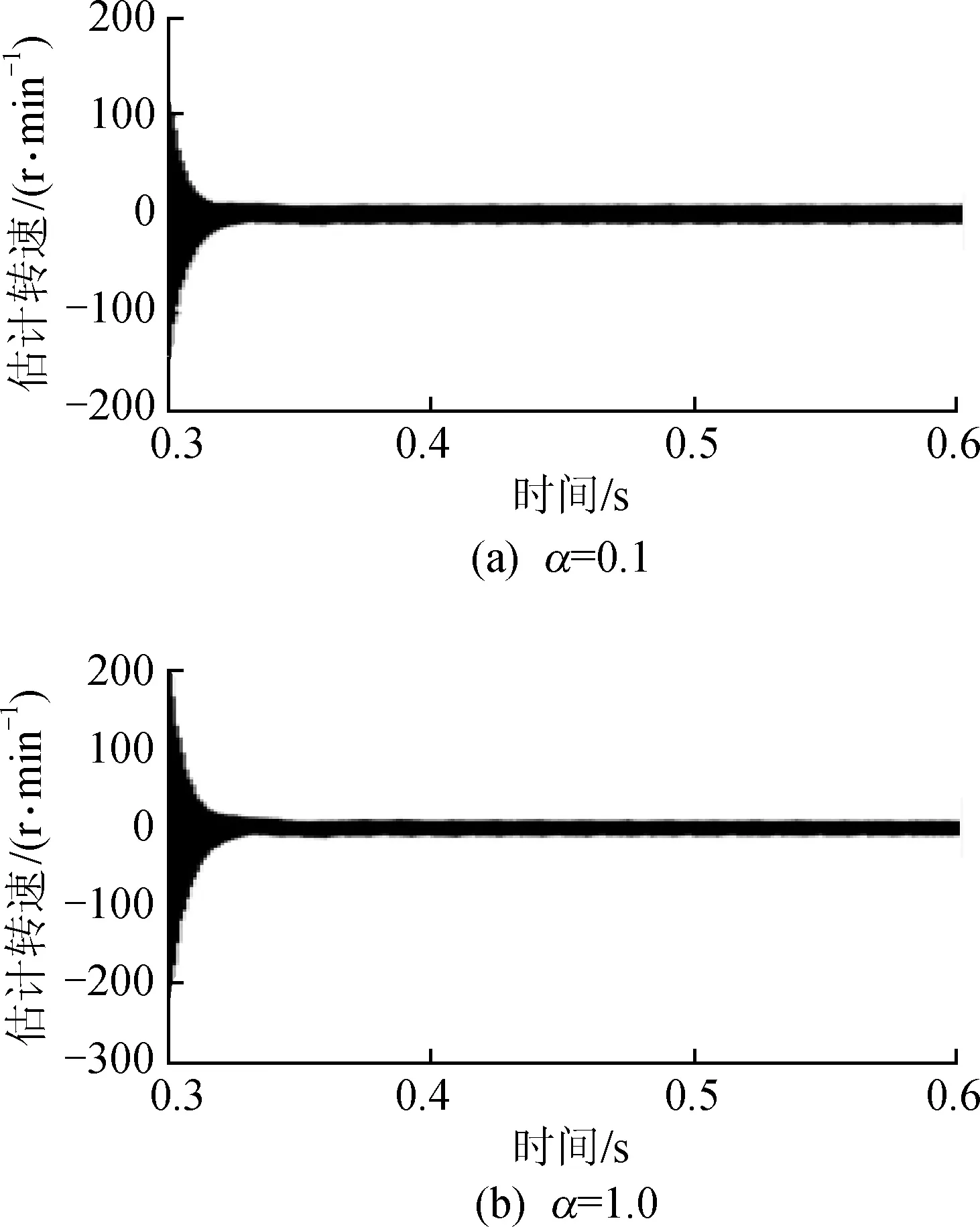
图8 加入负载时电机转速估计误差
4 结 论
本文提出了一种基于Lyapunov稳定性理论的分数阶MRAS方法并应用于PMSM中。将PMSM本身作为参考模型,PMSM电流方程作为可调模型和适应机制,为获得更精确的转速,将分数阶理论应用于自适应律中。仿真结果表明,相比于整数阶情形,在分数阶情形下,电机调速系统能够有较好的动态响应和较好的鲁棒性。