无人机飞行控制系统若干关键技术研究
2020-03-24李竟达
摘要:随着我国科学水平和通讯技术、信息技术、遥感技术的发展,无人机被广泛应用于空中侦察、监视、通讯、反潜、电子干扰等领域,作为无人机心脏的飞行控制系统其若干关键技术可以为无人机的地面操纵运动、飞行性能和品质提供可靠的保障。
关键词:无人机;飞行控制系统;关键技术;研究
随着我国科学水平的快速发展,并伴随着通讯技术、信息技术、遥感技术的发展,一种“会飞的照相机”诞生了,它就是被广泛应用于空中侦察、监视、通讯、反潜、电子干扰等领域的无人机,由于其成本低、使用灵活、适用范围广,目前得到了迅速发展,甚至有的人用它来记录日常工作和生活。无人机飞行控制系统是无人机的心脏,其若干关键技术可以为无人机的地面操纵运动、飞行性能和品质提供可靠的保障。
一、无人机、无人机系统与无人机飞行控制系统
通俗的说,无人机是一种飞行器,它不载人、借助空气动力起飞、通过遥控或自主飞行,根據设计或使用者的需要有一次性的也有可回收使用的,但一定携有致命或非致命有效载荷。
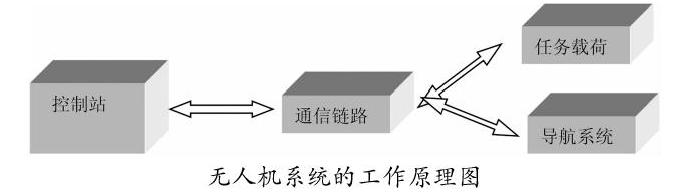
无人机系统是由飞机平台系统、信息采集系统和地面控制系统即控制站、任务载荷、导航系统和通信链路组成。控制站是飞行操控和任务规划中心,通过上行通信链路发送指令,控制飞行,操控所携带的各种任务载荷,通过下行通信链路,接收飞机回传的信息和图像,实现人机交互;任务载荷是无人机上为完成特定任务而携带的设备,它根据任务的需要分为两种,一种是非消耗型(如,雷达系统、污染监测等),能够重复使用,另一种是消耗型(如,植保系统、灭火系统、救生等);导航系统是用于雷达跟踪、无线电跟踪、直接估计的惯性导航、卫星导航、组合导航等;通信链路就是发送上行、下行指令、信息、任务等的数据传输设备,无人机系统的工作原理如下图所示:
无人机系统的工作原理图
无人机飞行控制系统是能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行的控制系统,是无人机的大脑,由GPS接收机板、稳定和导航控制板、机载通讯板、电路板以及机载遥控接收机板五部分组成,GPS接收机板主要是为稳定与导航板提高经纬度、GPS位置信息、高度、飞机位置和卫星信号等信息;稳定和导航控制板主要是对GPS接收机传送的信息进行计算和分析,对无人机飞行进行有效控制;机载通讯板就是接收稳定和导航控制板缩传送的信息和数据并进行下传;电源板就是给飞机的舵机、停车继电器等提供电源和控制飞控盒;机载遥控接收机板主要是将从地面接收和获取到的信息反馈给稳定控制板、导航板和通信板。
二、无人机飞行控制系统若干关键技术研究
无人机飞行控制系统是无人机的心脏,承载着无人机姿态稳定和控制、无人机任务设备管理和应急控制等任务,其设计的内容较多而且涉及的学科范围广泛(如,空气动力学、飞行力学等),其中关键技术至关重要。
(一)无人机建模技术可以提高地面操纵运动品质
无人机建模技术包含机理建模、系统辨识建模、在模型精度和控制系统设计上折中。系统辨识建模是对无人机气动参数进行辨识的方法,这种方法容易受到因气动参数较多,导致工作难度系数增大和重复试验、不断处理数据信息的影响以及辨识结果的适用范围有限,目前已经被机理建模所取代。机理建模是应用空气动力学和飞行力学,对无人机地面滑跑阶段进行研究的方法,包括了六自由度模型、非线性模型和动力学模型,这种方法由简单的两、三自由度模型发展为六自由度模型,并且考虑到空气动力和无人机地面滑跑阶段的受力因素,实现了由刚性建模向弹性建模的过度。无人机系统建模为了呈现无人机真实的运动特性,从而指导控制系统的设计和研发,模型的复杂程度和精确度越高,其反应出的更接近真实系统,但同时导致控制系统的设计和实现的复杂系数越大,因此,需要建立模型精度和控制系统设计上折中的方法。总之,无人机建模技术可以提高无人机地面操纵运动的品质。
(二)飞行控制技术可以提高飞行性能和品质
飞行控制技术是飞行控制系统的核心技术包括以时域响应、根轨迹等特性为理论依据的经典设计理论和以动态逆控制、鲁棒控制、自适应控制等为代表的现代控制理论。经典设计理论主要用于纵向、横侧向弱耦合且机动性要求较低的无人机,其方法简单,但不能适应现代飞机的整个飞行指标要求,现代控制理论在理论上适合现代飞机的飞行要求,但受建模技术等的影响,目前仍然无法应用于实际工程,只有二者相结合,进行优势互补,才能提高无人机飞行性能和品质。
(三)飞行控制律确认与评估技术可以提高飞行控制律设计的效率和可靠性
飞行控制律确认与评估技术是确保飞行安全和取得放飞许可的关键技术,也是飞行控制技术的重要环节,其常用方法有:μ分析、νgap分析、基于多项式的分析、分叉分享以及基于优化理论分析等,是用来分析和度量飞控系统中各指标参数在可预测的情况下,能够满足飞行安全性和品质要求,提高设计效率和可靠性。
三、结语
未来随着科技发展和社会的进步,无人机将作为一个终端设备被普及,广泛应用于人们的日常消费、娱乐以及农业和巡视等领域,无人机飞行控制系统也将成为数据终端的核心,将大量信息回传和分发,用户可以通过付费的方式获取有价值的信息。
参考文献:
[1]朱锐.小型无人机飞控系统设计[D].哈尔滨工业大学,2018.
[2]徐健.自主无人机飞行控制系统设计和实现[D].广西大学,2018.
基金项目:项目名称:Research on air pollution vertical distribution monitoring system based on multi rotor UAV内蒙古教育厅课题。项目编号NJZY19274,项目编号NJDJZJR1803
作者简介:李竟达(1983),男,汉族,内蒙古赤峰人,控制工程硕士,讲师,研究方向:控制工程。
