一种双容水箱液位系统的状态反馈控制方法
2020-03-24高兴泉祝强黄东冬丁三毛肖新宇
高兴泉 祝强 黄东冬 丁三毛 肖新宇
摘要:介绍了一种双容水箱液位系统状态反馈控制策略。首先利用泰勒级数展开法将水箱非线性模型进行线性化,经状态定义后得到系统状态空间方程,然后根据极点配置法求取状态反馈控制器增益矩阵。仿真结果表明,设计的闭环控制系统有较好的动态性能和稳态性能。
关键词:双容水箱;状态反馈;极点配置;线性化
双容水箱液位系统是模拟多容器流程系统的一个单输入单输出、非线性实验系统,也是过程控制中一个典型的受控对象。采用该对象可以用于验证各种控制方法[13]、故障诊断方法[4]、建模及模型辨识方法[5]。目前,已有多种控制策略如PI控制、变结构控制、自抗扰控制、自适应控制、模糊控制等成功用于双容水箱的液位控制。有些控制策略所设计的控制器结构复杂,参数整定麻烦,或实时计算量大,具体实施难度较大。为此,本文提出了一种基于极点配置的双容水箱状态反馈控制策略,所设计的状态反馈控制器结构简单,易于实现。首先根据机理建立的非线性系统方程,经线性化得到状态空间方程,然后分析系统的客观性,并利用极点配置法获取状态反馈增益矩阵。最后,通过闭环仿真,验证本文所提出控制策略的可行性和有效性。
1 双容水箱液位系统及其数学模型
考虑双容水箱的数学模型可以描述为:
At1dh1dt=QAo12gh1(1a)
At2dh2dt=Ao12gh1Ao22gh2(1b)
Q=KpVp(1c)
其中,h1和h2分别为上下水箱液位,At1=At2=15.5179cm2为两个水箱的横截面积,A01=Ao2=0.1781cm2为上下水箱底部出水孔的横截面积,g=981cm/s2为重力加速度,Q是水泵注入上水箱的水的流量,Vp是水泵的驱动电压,Kp=3.3是相关系数。
2 水箱模型线性化及状态空间模型
该系统是一个典型的非线性系统。首先将非线性微分方程(1)在平衡点处线性化。
设理想的或要求的h2的值为h2s=15cm,则可以计算出一个系统的平衡点为(Vps=9.26,h1s=15,h2s=15)。
定义状态x1=h1-h1s,x2=h2-h2s,u=Vp-Vps,将非线性微分方程(1)进行泰勒级数展开得到线性化的系统模型:
x·=Ax+Bu
y=Cx+Du(2)
其中A=0.06560
0.06560.0656,B=0.0644
0,C=01,D=0。
3 状态反馈控制器设计
基于状态空间模型(2),本文用极点配置法来确定状态反馈控制器增益矩阵。设状态反馈矩阵K为:
K=K1K2
引入状态反馈后,闭环系统特征多项式为:det(sI-A+BK)=dets0
0s--0.0660
0.066-0.066+0.213
0k1k2
结果为:s+0.066+0.213k10.213k2-0.066s+0.066=s2+(0.132+0213k1)s+0.014k1+0.014k2+0.0044
现在将系统的闭环极点配置到:
s1=-1,s2=-2
所以希望的特征多項式为:
(s+1)(s+2)=s2+3s+2
根据对应项系数相等:
0.132+0.213k1=0.014k1+0.014k2+0.0044=2
可以解得
k1=13.46,k2=129.08
得到的状态反馈控制器增益矩阵K为:
K=[13.46129.08]
4 仿真及实验结果
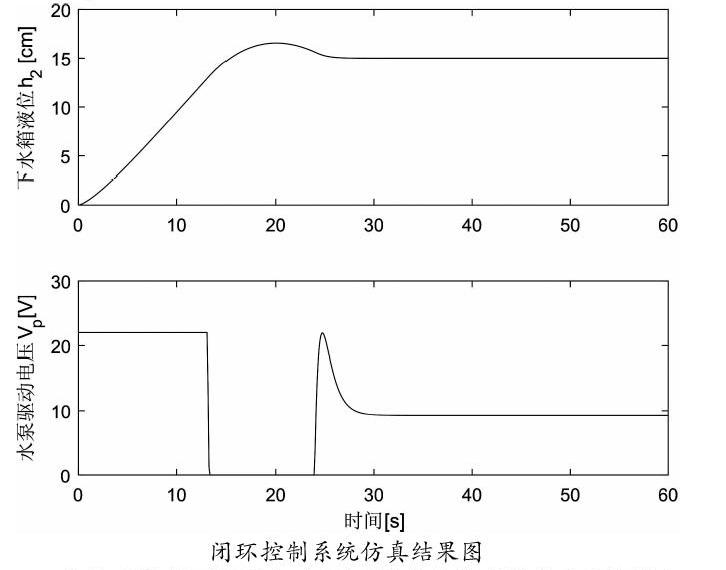
假设系统的初始液位都为h1(0)=0cm,h2(0)=0cm,设定值为h2s=15cm,得到的仿真与实验结果如下图所示。
从仿真结果可以看出,闭环系统有比较理想的动态性能和稳态性能。
5 结论
针对双容水箱液位系统,本文介绍了一种状态反馈控制器设计方法。首先根据得到的机理模型,通过线性化方法获取状态空间模型,然后根据极点配置方法求取状态反馈控制器增益矩阵。与其他控制方法比较,控制器在实际系统的实现过程中只要求进行乘法和加法的运算,实时性强,易于实现。
参考文献:
[1]蒋建波,苗爱敏,李鹏,梁竹关,邹勋,檀磊.双容水箱模糊Smith时滞补偿控制系统混合实验平台设计[J].实验技术与管理,2017,34(01):8489.
[2]黄勤芳,程艳,潘帅东.双容水箱液位系统的无模型自适应控制方法研究[J].机械设计与制造,2015(12):205207+212.
[3]王琳,张根宝.自抗扰控制器在双容水箱中的应用[J].计算机测量与控制,2013,21(03):775778.
[4]陈虹丽,李强,刘纹岩.THPFSY2型双容水箱液位实验系统鲁棒故障诊断[J].实验室研究与探索,2017,36(11):4447+63.
[5]胡姣.双容水箱系统的辨识与滑模变结构控制[D].西安理工大学,2017.
