基于花授粉算法的无刷直流电动机速度控制研究
2020-03-24孙彦超吴桂峰
张 娟,孙彦超,高 杨,吴桂峰
(1.扬州工业职业技术学院 智能制造学院,扬州 225127;2.扬州大学 水利与能源动力工程学院,扬州 225002)
0 引 言
无刷直流电动机(以下简称BLDCM)是随着机电一体化技术发展出现的一种新型电动机,它由电机本体和驱动器两部分组成。传统直流电机因带有电刷和换向器,应用受到了很大限制。BLDCM使用电力电子器件的开关作用代替电刷和换向器实现电流的换相,克服了传统直流电动机结构上的缺点,同时又保留了直流电动机控制性能好的优点[1-3]。BLDCM体积小,结构简单,易于维护,寿命长,现已广泛应用于家用电器、汽车、工业控制器以及航空航天等领域。
BLDCM速度控制系统最常用的控制策略是PID控制,这种控制方案易于实现,适用性广,鲁棒性强,其控制效果的优劣主要在于参数(比例系数Kp、积分时间常数Ki和微分时间常数Kd)的整定和优化。近年来,研究人员针对BLDCM控制系统中的PID参数在线优化做了许多工作。文献[4]研究了自整定模糊PID控制的BLDCM调速系统,有效降低了转速变化过程中的超调量。文献[5]研究了遗传算法在线优化PID参数,有效地降低调速过程中电机的转矩脉动和磁链纹波。文献[6]研究了粒子群算法在模糊PID控制器参数优化领域的应用,有效提高了控制系统的动态性能。
本文研究了用于BLDCM速度控制的新型控制组合:花授粉算法-PID-电流滞环控制方法。用花授粉算法在线优化PID参数,以满足系统在不同工作状态下的控制要求,改善电机调速过程中的动态性能。
1 BLDCM电流滞环控制方案
常用的BLDCM控制方法有矢量控制、双PI控制、直接转矩控制和电流滞环控制等方法,本文研究使用的是电流滞环控制方法。电流滞环控制是一种脉冲宽度调制(PWM)跟踪技术,具有响应速度快、实时性好、鲁棒性强、设计简单、易于实现等优点[7]。
使用电流滞环控制的BLDCM转速控制系统如图1所示。在此系统中,给定速度ω′与测量速度ω之间的差值送入PID控制器,PID控制器输出扭矩指令。参考电流发生模块根据扭矩指令和电机扭矩参数计算出参考电流的大小,此电流对应着转子的角位置。在电流滞环控制器中将参考电流与实际测得的电流(ia,ib,ic)进行比较,由两者的误差产生PWM控制信号,这就是电流滞环控制。PWM信号控制三相逆变器中的电力电子开关元件,平稳控制电机的相电流,使电机正常运转。
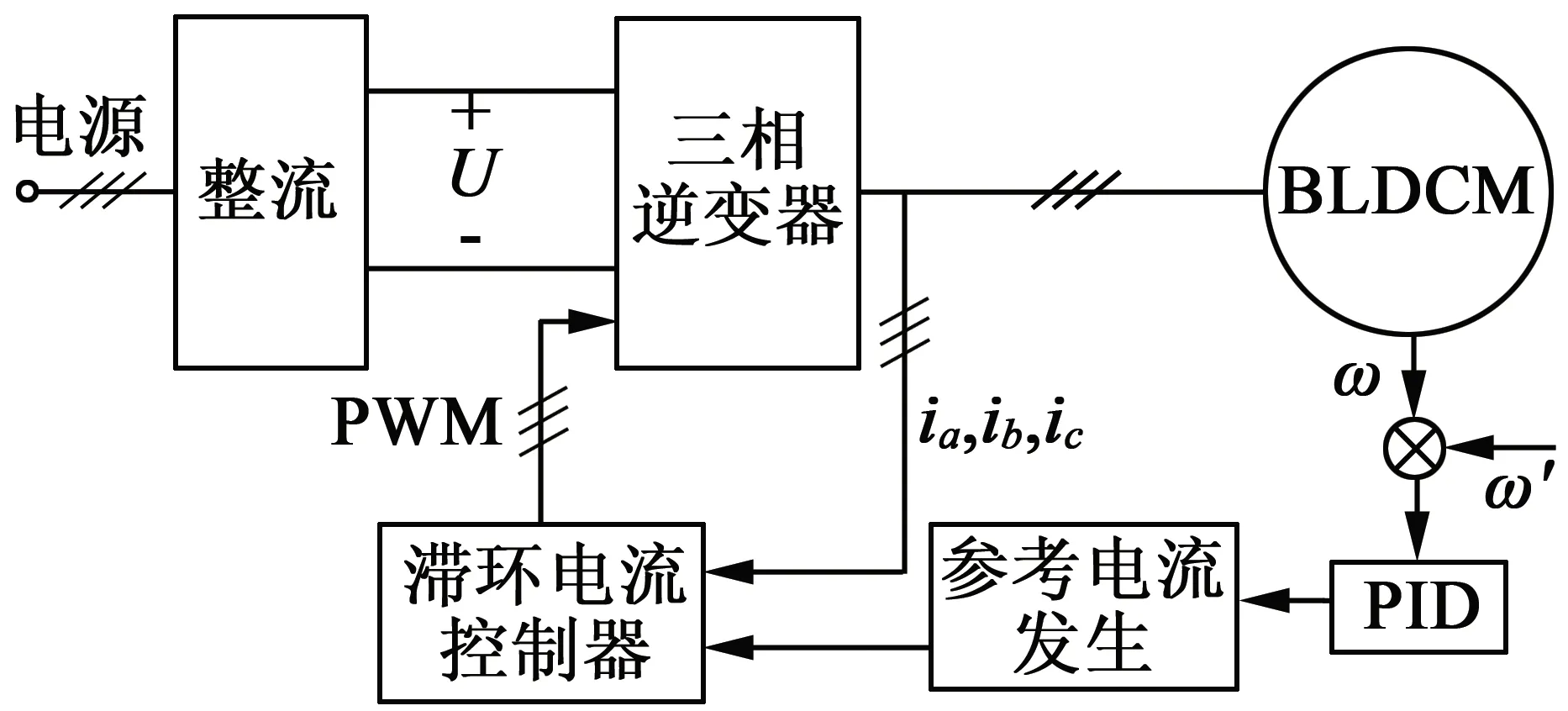
图1 BLDCM电机电流滞环速度控制系统
上述速度控制系统的速度跟踪能力取决于PID控制的增益Kp,Ki和Kd。传统PID控制器的增益不能在线自整定,难以满足不同工况下对电机控制的要求[8]。本文引入一种源于自然启发的智能算法——花授粉算法(以下简称FPA),采用FPA-PID技术,将积分平方误差作为迭代目标函数,寻求最佳PID增益参数,实现PID控制器的在线自整定。
2 FPA-PID速度控制系统
2.1 FPA-PID速度调节器的组成
FPA-PID速度调节器组成如图2所示,e(t)是给定值与实际测量值的偏差,e(t)平方的积分值是寻优过程中的目标函数,花粉的位置矢量由PID参数(Kp,Ki和Kd)构成,按FPA进行迭代,寻找符合目标函数要求的最优Kp,Ki和Kd值。该系统的PID增益随着电机的工作状态变化而自动调整,克服了传统PID调节器无法在线自整定的缺陷,提高了BLDCM速度控制系统的性能。
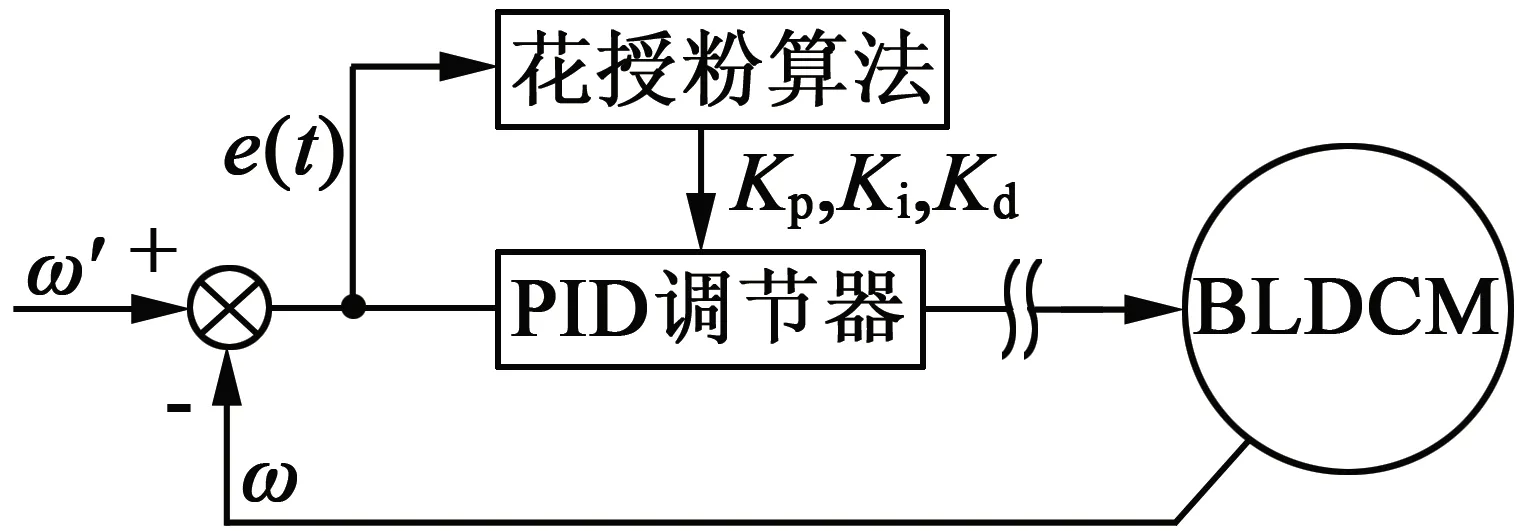
图2 FPA-PID控制器组成示意图
2.2 FPA
2012年,Xin-she Yang提出了这种算法,该算法模拟了开花植物授粉过程中涉及的自然行为。生物进化论认为,开花植物通过授粉繁殖是一个物种的优化过程,花授粉的目标是实现物种的最佳繁殖。在此过程中,参与授粉的花粉遵循优胜劣汰的规律。在FPA中,衡量每个花粉优劣的依据是花授粉的距离,并根据判断的结果更新花粉的位置(坐标),使其靠近最佳的结果[9-10]。
自然界有两种形式的授粉方法:生物和非生物。昆虫或鸟类等传粉者参与授粉的方法称为生物授粉,而相反,没有任何外部传粉者的授粉被称为非生物授粉。此外,授粉过程也可以分为自花授粉或异花授粉。异花授粉只不过是将花粉从一个开花植物转移到另一个植物的花中。而自花授粉是同一开花植物中从一朵花到另一朵花的授粉,不需要任何传粉者。从距离上看,花授粉有全局授粉(远处的花或附近的花)和局部授粉(自花和附近的花)两种,一般认为局部授粉的概率大于全局授粉。FPA算法的流程如图3所示。
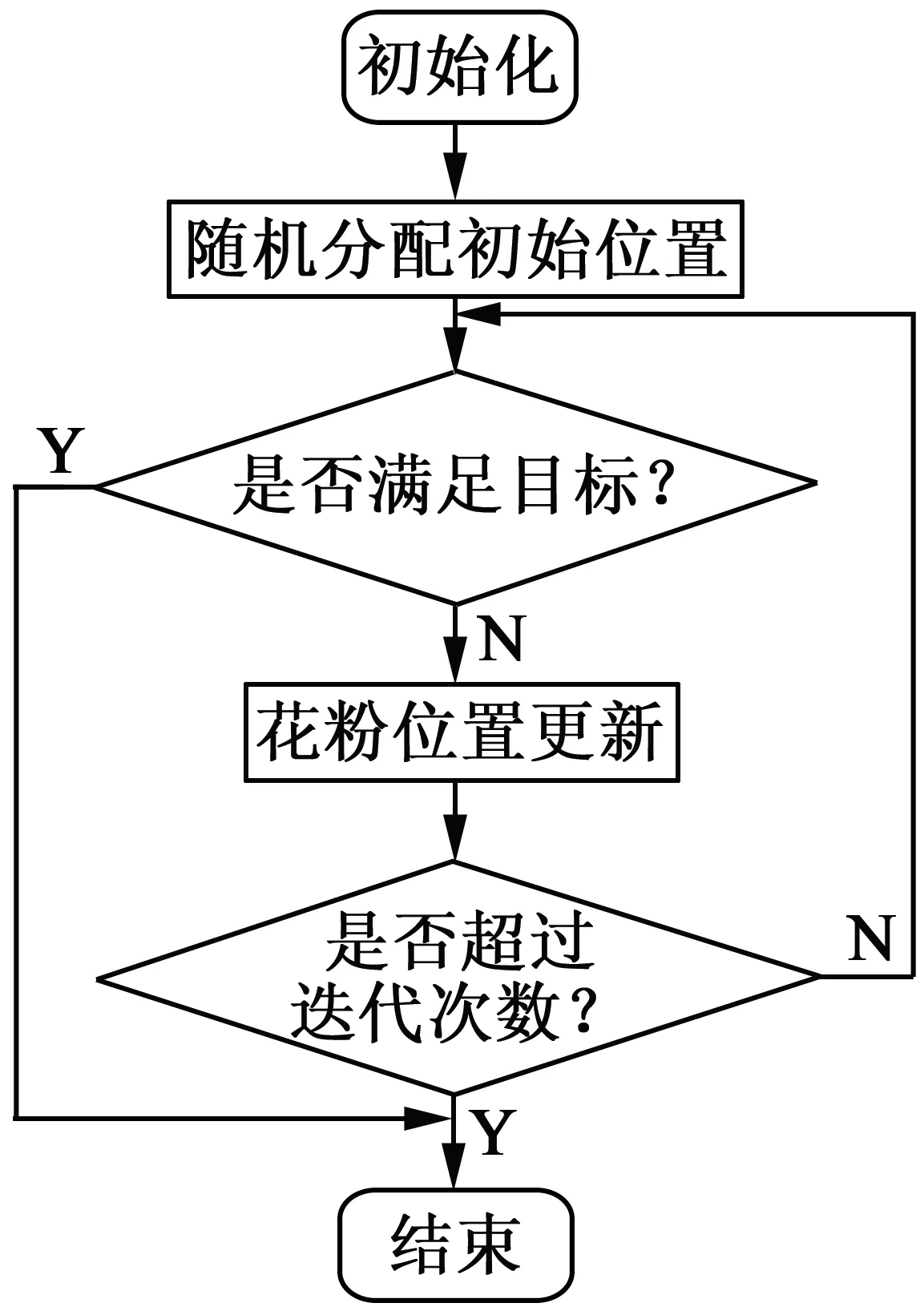
图3 FPA算法流程图
2.3 算法的实现
2.3.1 参数的设定
描述花粉群体P的数学表达式如下:
(1)

2.3.2 花粉位置的更新
在FPA中,按以下四条规则来更新花粉位置:
(1) 全局授粉过程中,携带花粉的生物飞行时符合“Lévy分布”规律;
(2) 局部授粉认为只能是生物授粉和自花授粉两种情况;
(3) 花繁衍概率正比于两朵花的相似性;
(4) 全局授粉和局部授粉之间的转换概率由一个随机数p确定。
可见,全局授粉和局部授粉是开花植物进化的核心,规则(1)~规则(3)可由下式来实现:
(2)
(3)

(4)
式中:Γ(λ)是标准伽马函数;λ是吸引系数;s值应大于0并足够大,s由蒙塔纳算法来确定,如下式:
(5)
式中:u~N(0,σ2)的含义是从一个标准高斯分布中抽取样本,该分布的特点是平均值等于0、方差为σ2,用下式来计算σ2:
(6)
由规则(4)可得到花粉坐标更新公式:
(7)
式中:p为转换概率,p∈(0,1),文献[11]研究表明,p取0.2,算法性能最优。
2.3.3 目标函数的选择
本次研究的对象是BLDCM的速度控制,算法迭代时的目标函数使用积分平方误差(ISE)[12],其表达式如下:

(8)
式中:e(t)是设定值和输出值之间的偏差。
3 实验与结果分析
3.1 实验实施过程
实验时使用的硬件如图4所示。光电编码器用来测量电机的转速,使用的是2 000脉冲/转的增量式编码器。dSPACE DS1103控制板接收现场采集的信号并传输给PC机,同时接收PC机的输出信号,生成PWM控制信号,控制三相逆变器。PC机根据给定值和输出值的偏差,按FPA-PID控制规律形成控制策略,并输出到dSPACE DS1103控制板,由后者生成PWM信号。

图4 实验系统组成框图
实验使用的BLDCM参数:功率0.75 kW,极数6,线电阻1.5 Ω,转动惯量为8.261 4×10-5kg·m2,电感6.1 mH,电压310 V,扭矩常数0.214 8 N·m/A。
花授粉算法初始化数据:PID增益取值范围为[0,50],花粉种群数量X=25,步长缩放系数γ=1,吸引系数λ=2,转换概率p=0.2,迭代次数=500。
3.2 实验结果分析
为了更好地验证FPA-PID系统参数优化的性能,研究人员针对不同的输入指令进行了仿真研究。用MATLAB/Simulink仿真软件对实验数据进行分析,绘制出BLDCM输出转速的跟随曲线,并与传统PID控制系统进行比较。图5是阶跃输入时的转速响应曲线,给定转速是300 r/min。图6是斜坡输入时的转速响应曲线,给定值是4 s内转速从0上升到1 000 r/min。两种情况下的输出转速上升曲线均表明,与传统PID控制系统相比,FPA-PID控制系统的动态和稳态性能有明显的改善。
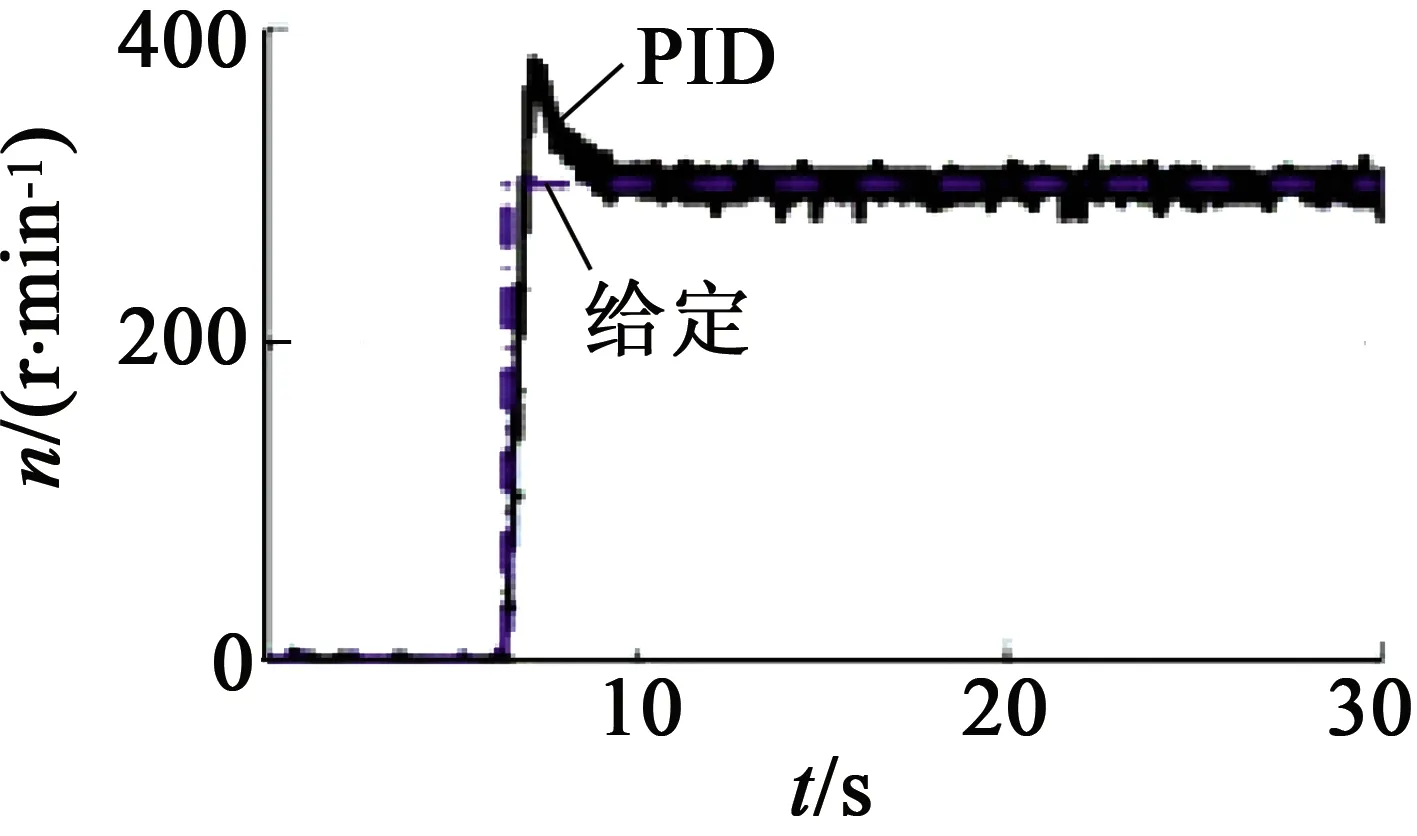
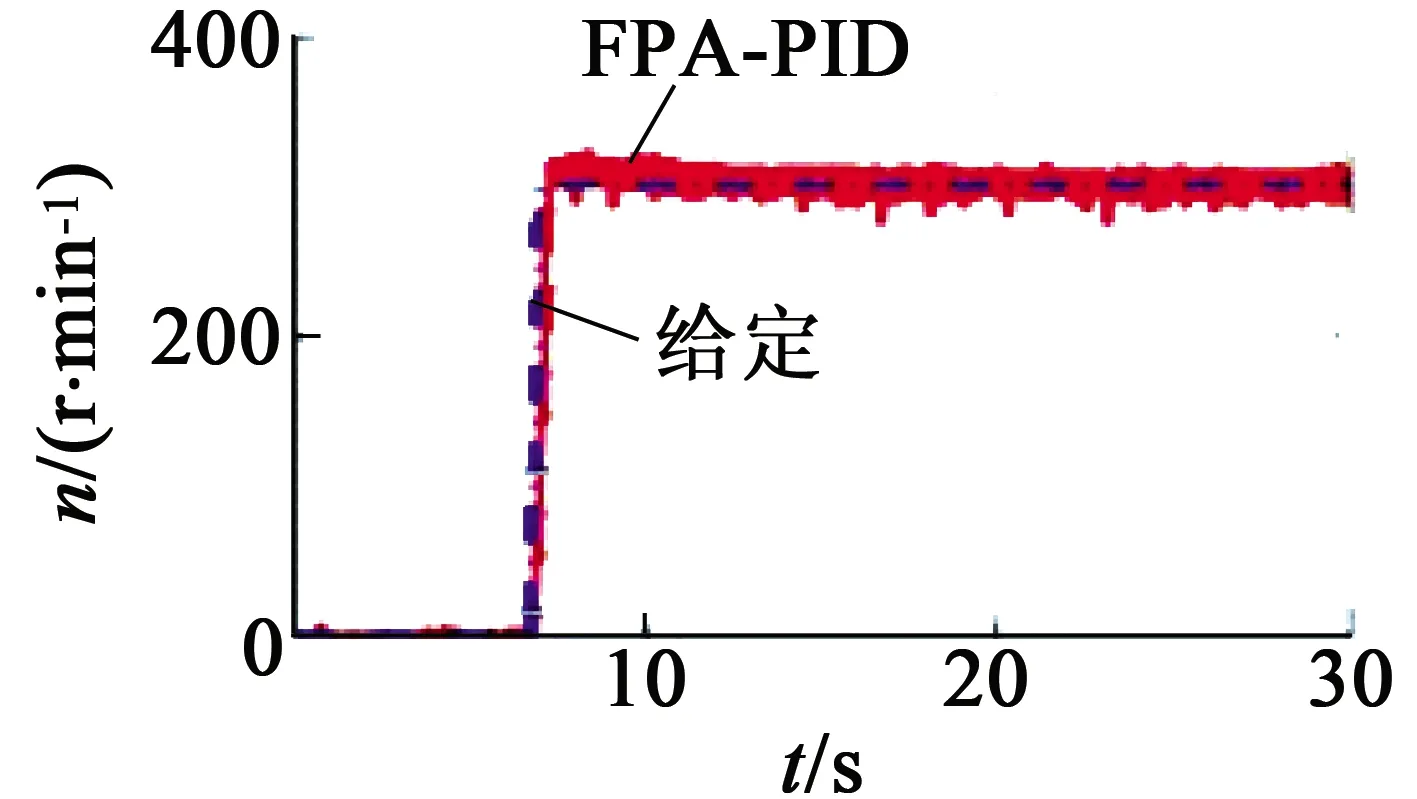
图5 阶跃输入时的转速响应曲线
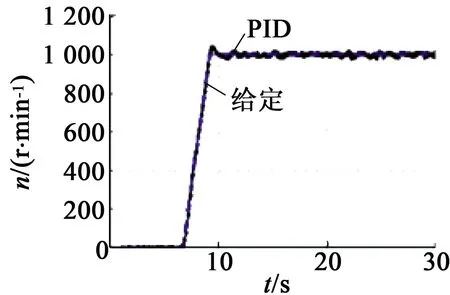
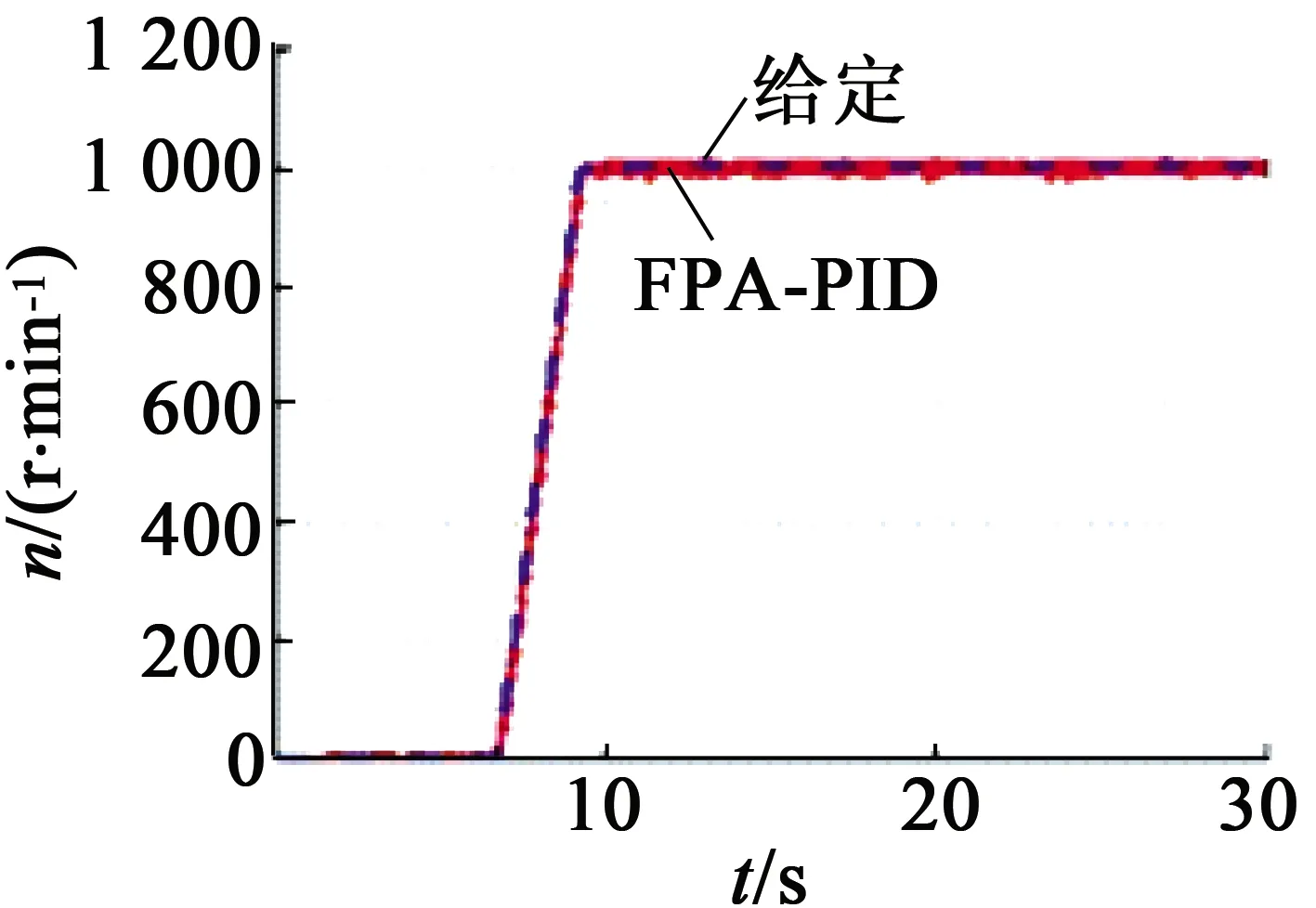
图6 斜坡输入时的转速响应曲线
4 结 语
本文引入FPA来实现BLDCM控制系统PID参数的在线优化。使用该算法,以积分平方误差为目标函数,优化PID增益参数,成功应用于一个电流滞环控制的BLDCM调速系统。仿真结果表明,用这种优化方法控制BLDCM,不仅能实现电机平稳运转,而且提高了控制系统的性能。此方法在伺服电机控制方面有着不错的应用前景。
