CRH3A型动车组自动速度控制模式下防滑控制及不旋转轴检测的研究
2020-03-23呼功崛马永靖王学文辛志强
呼功崛, 马永靖, 王学文, 辛志强
(中车长春轨道客车股份有限公司 国家轨道客车工程研究中心转向架研发部, 长春 130000)
近年来,高速铁路运输已经成为促进我国经济发展,加强区域协调,构建综合交通轨道运输体系的枢纽。高铁技术的不断发展完善了我国综合运输体系,随着国内外市场需求的不断增大,推动了高铁动车组技术的快速发展。
制动系统是与车辆运行安全直接相关的重要系统,动车组的制动形式分两种:空气制动和电制动。无论空气制动或电制动,都属于黏着制动。黏着制动最大的缺陷就是黏着力有限,同时轮轨黏着受轮轨间状态影响较大,如果制动力超过了黏着限制,车轮转速急剧降低甚至停转而车速降得较慢,这叫“滑行”或“抱死轮”[1]。一旦发生这种现象则很有可能导致轮轨擦伤,车轮擦伤后会产生偏心,踏面产生多边形效应,不仅降低运行的平稳性和乘车的舒适度,还会增加对转向架的冲击振动,缩短转向架部件的使用寿命,影响行车安全[2]。为保证动车组能够安全可靠地行车,动车组防滑系统必须响应迅速,防止车轮滑行,恢复轮轨的黏着状态。
将结合CRH3A型动车组ASC模式下空气制动和电制动的防滑控制和轴不旋转检测原理,针对CRH3A型动车组发生滑行和轴抱死的实际案例,分析原因并给出解决措施。
1 ASC模式下的防滑控制和不旋转轴检测
1.1 制动指令
在ASC(Automatic Speed Control)模式下,由TCMS(Train Control Management System)进行列车制动力计算,TCMS仅使用电制动力来调节列车速度。TCMS计算的电制动力指令直接发给TCU(Traction Control Unit),不通过BCU(Brake Control Unit)中转。TCU将单车的电制动力能力值(信号C)和电制动力实际值(信号E)发给BCU,见图1。
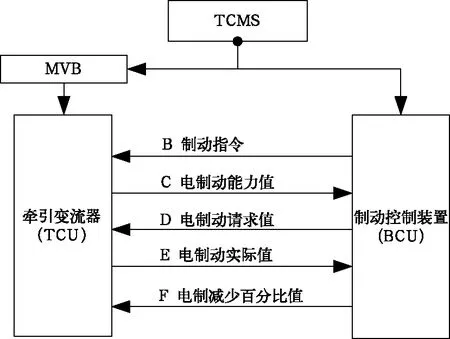
图1 TCU与BCU相关接口图
1.2 防滑控制
BCU仅在非牵引(制动或惰行)状态时才激活防滑功能,将本车4个轴中速度最高的轴速作为参考速度,BCU根据参考速度及各轴的轴速对每个轴进行防滑判断,并通过防滑阀进行缓解、保压和制动的控制。
如果正常制动过程中,BCU检测到列车出现滑行,TCU响应BCU发出的电制减少百分比值信号(信号F)。本车TCU执行的电制动力实际减小值发给BCU,电制动力实际减小值=信号E(kN)×信号F(%),见图1。
由上述防滑的原理可知,牵引状态决定了防滑功能是否激活,BCU判断牵引施加的条件为:
自动速度控制牵引位CCU_ASC_Traction =1 或手柄牵引位TL_R_Traction=1,并且无任何制动激活,无任何制动激活,是指以下任一制动都不激活:
①紧急制动UB;
②紧急制动EB;
③制动手柄级位>0;
④制动手柄处于制动位(TL_R_Braking);
只要BCU判断本车处于非牵引状态,即视为本车处于制动或惰行状态,防滑功能就会激活。
1.3 不旋转轴检测
不旋转轴检测功能不论在牵引或非牵引状态均会进行检测,并且与防滑控制功能相互独立。将本车速度第2高的轴速作为参考速度v2nd,参考速度v2nd与最低轴速vmin的差值同v(v=50+0.3v2nd)进行比较,如果差值大于v并持续10 s,则报出低速轴的轴抱死故障,不旋转轴检测逻辑见图2。
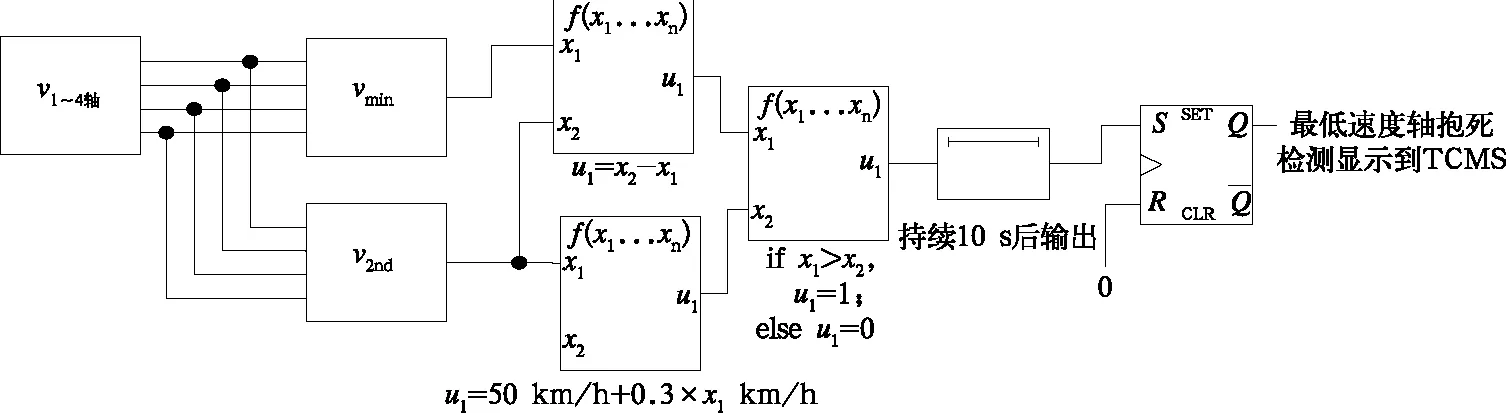
图2 CRH3A型动车组不旋转轴检测逻辑图
2 案例分析
2.1 事件经过与数据记录
CRH3A型动车组在ASC模式下正常运行,因下雨而发生滑行,06车报轴抱死故障(00车占用),未发生擦轮。
事件过程如下:
06:39:20时,00车牵引电机M1速度传感器故障,00车逆变封锁,电制动失效。
06:58:42时,06车牵引电机M1、M2速度传感器故障,06车逆变封锁,电制动失效。
06:58:50时,06车报轴1、轴2抱死。
2.2 数据分析
事发时天气为小雨,造成轨道湿滑,随着运行速度的增加,黏着系数将急剧下降[3]。当实际黏着系数低于利用的黏着系数时,列车发生滑行,00车报出牵引电机M1速度传感器故障,持续运行中由于滑行严重,导致06车TCU报牵引电机M1、M2传感器故障,BCU报出轴1、轴2抱死,但根据CCU数据,BCU在报出轴抱死故障前未报滑行。
根据CCU数据显示,06:58:26至06:58:35时,06车施加电制动;06:58:42至06:58:50时,列车的恒速设定值为194 km/h。
根据下载的BCU数据显示,当轴抱死故障发生时,06车轴1~轴4速度值分别为29.3 km/h、 40.9 km/h 、122.5 km/h 、131.2 km/h(见图3),根据不旋转轴检测诊断逻辑,报出轴1和轴2抱死。
通过以上分析得出:
06:39:20时,00车电制动失效,车组恒速运行时,00车转为拖车,06车转为首个牵引动车。
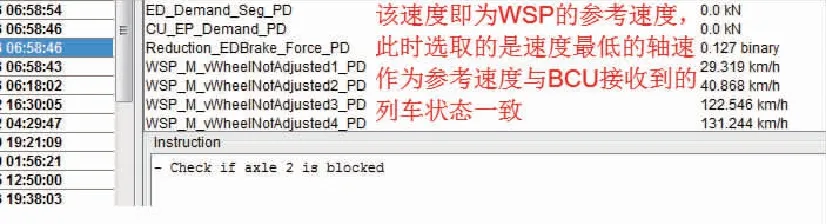
图3 轴抱死故障时06车BCU轴1~轴4速度数据
06:58:26至06:58:35时,电制动力施加造成06车速度降低,单车滑行,而实际车速为194 km/h。06车滑行,1、2轴滑行严重,3、4轴滑行较轻。从而在06:58:42时,06车报牵引电机M1、M2速度传感器故障。06:58:50时,06车报轴1、轴2抱死。
2.3 故障结论
针对BCU在报出轴抱死故障前未报出滑行的问题,分析后的结论如下:
在ASC模式下,牵引手柄一直置于牵引位,“牵引位状态列车线TL_R_Traction”信号一直保持激活状态,且BCU未收到任何制动指令,此时BCU判断本车处于牵引状态。故在ASC模式下,即使TCMS发送制动指令给TCU进行调速控制,列车实际施加电制动的工况下,BCU的滑行检测与控制功能始终未激活,进而导致列车在没有防滑控制的情况下,轴速满足了轴抱死检测判据,报出了轴抱死故障。
3 优化方案
通过上述分析,在ASC模式下,若TCU因故障导致防滑功能失效,列车存在因无防滑控制而发生轴抱死的风险。为解决此问题,对CRH3A型动车组进行如下优化:
在ASC模式下,BCU不再考虑来自牵引手柄的“牵引位状态列车线”信号;增加“进入ASC模式”MVB信号,当“进入ASC模式”MVB信号激活且“ASC模式牵引”信号未激活时,BCU判断本车处于非牵引状态,激活BCU的滑行检测与控制功能。
4 结 论
介绍了CRH3A型动车组ASC模式下防滑控制及不旋转轴检测的原理,结合原理针对案例分析出造成轴抱死事件的原因,并据此制定了ASC模式下的防滑优化方案,解决了该问题,对其他动车组的防滑设计具有借鉴意义。
