基于卡尔曼滤波数据融合算法的智能钓鱼竿系统①
2020-03-23陈小磊岳俊峰李秀梅
陈小磊, 岳俊峰, 李秀梅
(杭州师范大学 信息科学与工程学院, 杭州 311121)
钓鱼作为一项考验技术、耐力、经验的户外运动,已经被越来越多人所接受, 而钓鱼活动中最重要的工具就是钓鱼竿, 传统钓鱼竿往往需要通过长时间的钓鱼活动训练和长时间盯着鱼漂才能看漂识鱼, 极大地降低了钓鱼的乐趣.目前市场上加装传感器的鱼竿一定程度上弥补了传统钓鱼竿的不足, 但此类钓鱼竿依然存在很多缺点: (1)检测装置单一, 缺乏水域监测能力.(2)抗干扰能力较差, 有鱼咬钩时, 报警信号误报率较高, 咬钩时不能准确报警.(3)不具备自动遛鱼功能,断线跑鱼概率较大.
针对上述情况, 本文利用多种传感器和MCU 控制器及外围硬件电路, 通过嵌入式技术和自动化控制技术, 研究一种具有智能选钓位、智能报警及自动遛鱼等功能的新型智能钓鱼竿系统.该智能钓鱼竿系统将有助于提高钓鱼的精确度, 同时提供一种自动化钓鱼方案, 为在恶劣环境下完成自主钓鱼活动提供可能.本系统基于卡尔曼滤波的数据融合算法对四元数法解算得到的鱼竿姿态角数据进一步修正, 最优鱼竿姿态角是智能报警和智能遛鱼功能实现的关键.因此本文主要研究鱼竿姿态解算过程、姿态数据滤波算法及鱼竿自动遛鱼控制算法等内容.鱼竿姿态解算、控制系统数学模型以及串级PID 控制算法的仿真测试结果表明, 控制系统响应良好.在uC/OS-II 操作系统下, 环境传感器及姿态传感器的数据解算实时性良好, 例如鱼竿报警功能, 具有较高灵敏度和准确率, 符合预期目标.
1 智能钓鱼竿系统总体方案设计
智能钓鱼竿主要由8 个部分组成, 如图1 所示, 其中① 为鱼竿杆体, ② 为负责收放线的纺线轮, ③ 为环境检测部分, 该部分主要由温度传感器、光线传感器、溶解氧传感器及深度传感器所组成, 该部分将负责测量待钓水域的环境信息以作为钓位选择的依据, ④ 为姿态传感器部分该部分主要由陀螺仪传感器、加速度计传感器及磁力计传感器所组成, 该部分主要功能为获取鱼竿姿态, ⑤ 为鱼竿手柄该部分, ⑥ 为鱼竿控制部分, 该部分由STM32 控制器、电机驱动、电机及报警模块组成, 为智能钓鱼竿控制部分的核心, 其通过鱼竿姿态的变化来实现智能钓鱼竿的报警及遛鱼功能, ⑦ 为电源模块.该模块主要负责为整个系统供电.⑧ 为鱼线.
钓鱼竿智能选钓位功能的实现是通过将温湿度传感器、光线传感器、深度传感器、溶氧量传感器及微控制器集成于一个防水球体内, 在钓鱼时, 将此可拆卸的球体随钓鱼钩一起投入待钓水域, 通过球体内的微控制器及传感器采集待钓水域的温度、光线、深度及含氧量等数据, 并通过数据分析预判该水域是否适宜鱼逗留, 进而实现智能选钓位的功能.

图1 智能钓鱼竿示意图
钓鱼竿智能报警功能的实现是通过在钓竿顶部安装姿态传感器, 通过姿态传感器中的三轴加速度计采集加速度数据, 三轴磁力计采集磁场数据, 三轴陀螺仪采集角速度数据, 微控制器分别对三轴陀螺仪和三轴加速度计采集到的角速度数据和加速度数据通过卡尔曼滤波算法进行数据融合, 转化为欧拉角进而获取钓竿姿态.当鱼有咬钩信号时, 鱼竿会有向下的瞬时加速度, 同时鱼竿发生形变即会有一定的倾角变化, 此部分功能将通过瞬时加速度及鱼竿姿态变化倾角作为报警信号, 通过高精度姿态传感器获取鱼竿姿态变化, 能更加有效的捕捉到鱼咬钩的轻微信号, 这将极大地减少误判率进而改进目前市场大多鱼竿报警率低的问题.
钓鱼竿智能遛鱼功能通过自动化控制技术实现,通过测量及预判鱼线实时拉力值, 建立鱼竿物理模型,利用鱼竿姿态倾角变化来驱动电机, 可有效控制鱼线收放过程, 使遛鱼过程中鱼线始终处于鱼线的最佳拉力值附近, 从而减少断线跑鱼的概率, 实现智能遛鱼功能.
2 智能钓鱼竿系统硬件部分设计
智能钓鱼竿系统硬件部分设计框图如图2 所示.本文选用STM32F103ZET6 微控制器作为智能钓鱼竿核心控制器, 温湿度传感器DHT11 和光敏电阻模块作为环境传感器, MPU6050 六轴加速度/角速度传感器作为鱼竿姿态采集模块, TB6612FNG 作为直流减速电机驱动模块, 12 V 聚合物锂电池作为电源模块.

图2 智能钓鱼竿系统硬件部分设计框图
3 智能钓鱼竿系统软件部分设计
本部分主要完成以下内容: (1) 四元数法解算鱼竿姿态; (2) 通过建立卡尔曼滤波算法的状态方程和观测方程实现基于卡尔曼滤波的数据融合算法; (3) 建立串级PID 算法模型, 并通过Simulink 仿真整定PID 参数,进而实现智能钓鱼竿的控制.
为了实现智能遛鱼功能, 鱼竿电机控制流程如图3,通过加速度和磁力计得到的姿态角作为卡尔曼数据融合算法的测量值, 将陀螺仪传感器得出的姿态角作为预测值, 通过卡尔曼滤波数据融合得到精准姿态角.将由数据融合的到的姿态角作为串级PID 算法的输入量, 通过外环角度PID 和内环角速度PID 算法求出电机控制调节量, 通过电机驱动来控制电机转向和转速.

图3 鱼竿电机控制流程图
3.1 四元数姿态解算
四元数法是比较常用的姿态解算方法, 通过引入一个四维空间超复数, 当实部为零时, 建立了四维空间和三维空间的联系, 由于角速度积分有累计误差的特性, 因此需要借助加速度分量对四元数矩阵进行修正,再利用四元数和欧拉角的转换公式即可计算出欧拉角.
图4 为智能钓鱼竿四元数姿态解算的流程图.首先初始状态下, 由四元数和欧拉角的关系确定初始四元数, 姿态传感器采集原始数据并通过均值滤波方法过滤掉高频信号, 然后将四元数的等效余弦矩阵中的重力的分向量归一化后进行向量的叉积运算, 进而求解出陀螺仪的积分误差, 得到准确的角速度后采用一阶龙格库塔法更新四元数和姿态矩阵, 将四元数归一化后即可转换出欧拉角.

图4 四元数姿态解算流程图
3.1.1 四元数定义
四元数是一个复数由实部和虚部组成, 四元数的虚部包含3 个虚数单位i、j、k, 即四元数可以表示为:

其中, 复数间有以下关系:

四元数的矩阵表示形式为:

在三维坐标系中, 用四元数表示绕着某个轴的旋转公式可用式(6)来表示, 其中, α 表示绕轴旋转的实际角度, cos(βx), c os(βy)和 cos (βz)表示定位旋转轴的方向余弦.当四元数的范数满足时, 称该四元数为单位四元数.该约束条件建立了三维和四维空间的联系, 可以利用四维空间的四元数性质和运算规则来解决三维空间中的旋转问题.

3.1.2 四元数微分方程q0, q1, q2, q3是时间的函数.可建立四元数微分方程如下:
由于对象是运动的, 所以四元数Q 是个变量, 即

其中, ω 为沿坐标系的角速度.
将上述公式展开:
姿态矩阵角速度 ω= [ωx,ωy,ωz]T可通过陀螺仪测量值经过补偿后得到.
3.1.3 四元数姿态矩阵关系
四元数转换成方向余弦矩阵: 设有参考坐标系e,钢体坐标系为b, 假设初始状态e 坐标系与b 坐标系重合, 则通过四元数可以得出b 坐标系旋转至e 坐标系的转换矩阵, 坐标转换矩阵公式见式(9)[1]:

通过式(10)可求出由b 坐标系转换至e 坐标系的坐标(Xe,Ye,Ze).

从方向余弦矩阵欧拉角的转换: 设鱼竿的偏航角为 ψ, 俯仰角为θ, 翻滚角为 φ, 假设导航坐标系为g, 则刚体坐标系b 与导航坐标系e 的关系如下[2]:

我们认为:

由于在坐标系在旋转过程中坐标系一直保持正交关系, 所以有为正交矩阵:

由式(13)和(14)得:

由式(14)和式(15)通过上述公式变换即可解算出载体的姿态角得出:

3.1.4 初始四元数
设三轴加速度计和三轴磁力计在静止条件下的初始姿态角为( ψ, θ , φ).有:
由式(13)和式(17)可得:

由式(18)即可得出初始四元数.
3.1.5 更新四元数
四元数的更新常采用一阶龙格-库塔法算法来实现[3], 一阶龙格-库塔法的解为:

进而可推出:

设 gx、 gy、 gz为陀螺仪传感器测量的角速度, 设T 为姿态更新时间, 则由四元数微分方程的求解公式可得更新后的四元数:

3.1.6 四元数转换欧拉角
计算当前时刻的四元数Q (t+T), 并对其进行归一化处理:

设四元数[q0q1q2q3]的模为mode, 则:

由式(24)可得姿态角为:

3.2 卡尔曼滤波算法
作为一种高效的自回归滤波器, 卡尔曼滤波常用于解决离散的线性系统滤波问题.卡尔曼滤波通过最小均方差来衡量最佳估计的标准, 算法的实现是通过求解状态方程和观测方程然后不断的更新最小均方差,进而得出最优估计.
3.2.1 状态方程和观测方程
一个常规的线性离散系统模型, 其状态空间方程如式(26)所示:

其中, Fk-1为 k-1 时刻对应状态转移系数矩阵; Gk-1为k-1 时刻对应控制输入的增益矩阵; w 为过程噪声.
观测方程如下:

其中, zk表示k 时刻的观测值; H 表示测量系数矩阵;vk表示观测噪声.
状态方程中的噪声w 和测量噪声v 默认情况下认为两者是相互独立且满足高斯分布的白噪声, 即:

为了在实际使用中简化算法, 常假设噪声协方差矩阵Q 和测量噪声协方差矩阵R 均为定值.
3.2.2 卡尔曼滤波算法流程
卡尔曼滤波算法在数学方法中是一种递归预测法,以偏差的最小方差为标准, 计算得到系统的最优估计值, 具有较好的实时性和抗干扰性[4].卡尔曼滤波算法是通过测量过程和预测过程间的相互更新相互反馈并通过求解卡尔曼增益和更新状态方程来实现系统的自回归状态估计, 进而求出系统的最优估计.卡尔曼滤波器可分为时间更新方程和测量更新方程.
式(30)和式(31)为卡尔曼时间更新方程:

式(33)和式(34)为状态更新方程:

状态更新方程中, K 为滤波增益矩阵即卡尔曼增益, { zk-Hxk¯}为观测值和预测观测的残差, 和卡尔曼增益K 一起修正先验预测, 更新状态估计, 利用先验估计误差的协方差矩阵更新 Pk, 以备下次自回归运算使用.
3.3 基于卡尔曼滤波的数据融合算法
由于三轴陀螺仪是通过角速度的积分获得姿态角,存在随机漂移误差和常值误差, 随着时间的增加, 必然会使输出误差也积累增加, 因此单独使用陀螺仪进行姿态解算无法获得准确的姿态角.加速度计只有在静止或匀速状态下通过测量重力场, 可以准确计算出姿态角, 但是在实际情况中加速度计通常处于动态环境中, 因此单独使用加速度计解算出的姿态角同样不可靠.由于外界磁场的干扰, 单独使用磁强计计算出的偏航角同样存在误差.为解决上述问题, 很多控制领域的专家做了大量研究, 并提出多种组合测量的方案[5], 结合本文需求及精确度要求, 本文结合卡尔曼滤波的递归预估特性, 采用一种基于卡尔曼滤波的数据融合算法.
3.3.1 状态方程的建立
状态方程的建立是将陀螺仪输出的角速度通过四元数微分方程计算姿态角的过程, 作为当前状态的预测.通过四元数微分方程求出的姿态角, 将作为当前预测值.姿态角的详细计算过程已经在3.1 节四元数姿态解算中详细叙述, 所以这里只给出相关公式:
四元数微分方程:

其中, ω 为沿坐标系的角速度.
将式(35)展开:

通过四元数归一化可求出当前时刻姿态角(俯仰角、翻滚角、偏航角).
由卡尔曼滤波经典状态方程可知预测值包含真实角度和误差角度, 所以这里我们将所求的姿态角作为真实角度和误差角度的合成, 用公式可表示为:

3.3.2 观测方程的建立
将由加速度计和磁力计测量出的实际姿态角作为观测量.

3.3.3 姿态角噪声估计计算方法
在实际卡尔曼滤波器应用过程中, 过程噪声协方差Q, 即作为预测姿态角的陀螺仪获取姿态角的过程误差协方差矩阵, 通常不容易得到, 但可以通过实验的方法计算得到.测量噪声协方差R, 即作为测量姿态角的加速度计和磁力计的噪声协方差矩阵, 通过分析得到包含测量噪声的数据, 测量噪声协方差R 可以通过数据的融合更新得到, 具体计算过程如下:

将上面两式相减, 即可得到两时刻的融合误差:

求融合误差协方差:

由于陀螺仪、加速度计和磁力计的误差为相互独立, 即自相关性为0, 满足:

则由式(41)~式(43)经过化简及近似取代可得误差协方差的最终结果为:

则得加速度计和磁力计的协方差R:

通过以上计算得出的测量噪声协方差R, 用于卡尔曼滤波的自回归数据更新, 经过反复优化迭代, 进而得到最优姿态角.
3.3.4 算法流程
(1)初始化参数, 记初始状态k=1, 在六轴MPU6050传感器处于静止状态下, 通过陀螺仪、加速度计和磁力计获取初始角度.
(2)当k=2 时, 根据陀螺仪的角速度数据, 通过四元数法进行姿态解算预测当前角度, 根据前期陀螺仪数据实验求得先验误差协方差 Pk¯.
(3)按照式(32)求出卡尔曼增益K.
(4)根据k=2 时刻的加速度计和磁力计求出的姿态角作为观测值, 按式(33), 式(34)实现预测值更新.
(5)计算k+1 时刻的预测值.实现方法: 通过采集k+1 时刻的陀螺仪输出的角速度, 代入四元数微分方程求出此时刻的姿态角, 并作为预测值.然后循环执行步骤(3)和步骤(4).
算法流程如图5 所示, 先对初始时刻采集的陀螺仪、加速度计和磁力计原始数据进行相应的滤波处理,若是初始状态下, 那么将陀螺仪和加速度计解算出的姿态角作为初始姿态角, 并根据初始姿态角求出初始四元数, 然后将通过陀螺仪采集到的数据带入四元数微分方程进而求出姿态角, 并作为估计角度, 通过采集加速度计和磁力计数据并通过计算求出的姿态角作为测量值, 可计算出过程噪声协方差和测量噪声协方差.利用卡尔曼滤波算法将预测角度和测量角度进行融合得到最优估计角度, 由卡尔曼滤波公式可知, 两个符合高斯分布的数据融合后仍然满足高斯分布且最优值处在融合后的高斯分布曲线, 因此可将每次计算出的姿态角作为下次融合的初始角, 反复的数据融合能够得到一系列稳定的最优估计角度[7].
3.3.5 卡尔曼滤波数据融合算法的适用性
本文通过卡尔曼滤波数据融合算法输出姿态角,而实际系统中总是存在不同程度的非线性因素, 利用线性化卡尔曼滤波方法, 通过不断地统计和计算数据方差来自动改变卡尔曼增益系数K, 因此当系统存在噪声或者预测量的累积误差较大时, 也能提高系统精度, 误差能够通过快速迭代而减少.
智能钓鱼竿中采用高性能单片机获取高频的姿态数据, 自动整定得到的卡尔曼增益系数具有较强的通用性, 同时计算量相对较大.智能钓鱼竿系统中使用的STM32 微处理器能够保证数据融合线程周期不超过100 ms, 较高的姿态融合频率可以保证预测量误差较小且收敛速度较快, 因而基于线性卡尔曼滤波的姿态数据融合能较好地完成对目标的滤波估计处理.
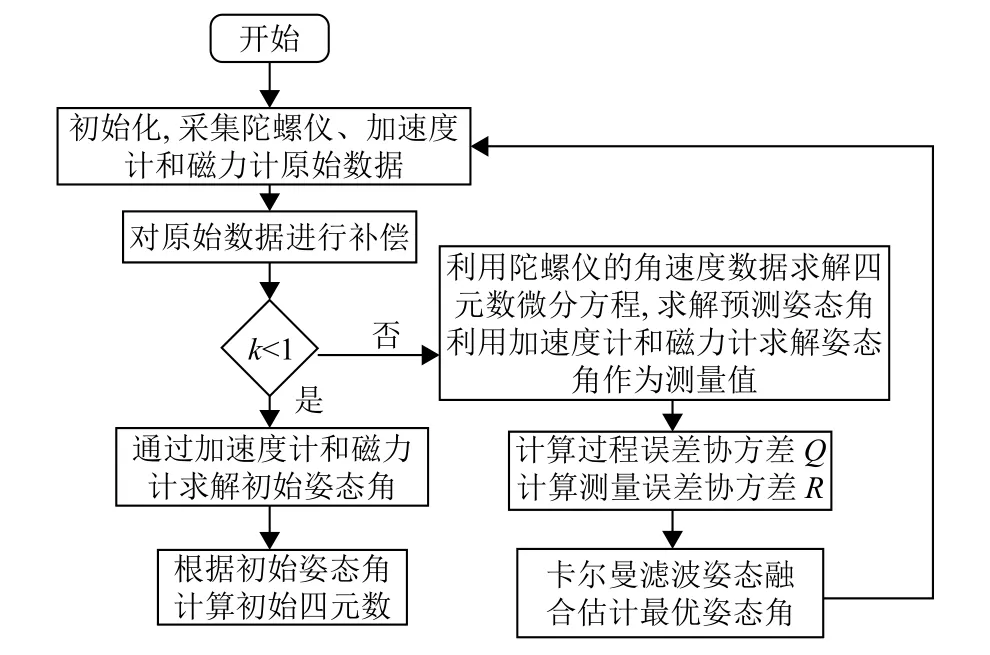
图5 算法流程图
3.4 基于PID 控制算法的智能遛鱼控制方案
本文中所述鱼竿是以电机转动带动鱼竿纺线轮实现鱼线自动收放线的智能钓鱼竿.所谓遛鱼, 指的是一种钓鱼方法.钓鱼时如果钓到个体较大的鱼一般都不能直接将鱼提上来, 鱼势必在被勾住后挣扎逃窜, 此时我们需要根据鱼的力气大小来选择收线和放线, 在收线和放线的来回拉扯中, 逐渐消耗掉鱼的体力, 当鱼精疲力竭停止反抗时, 将鱼拉回岸边的这个过程, 形象地称为“遛鱼”.
通过上文中的姿态解算及卡尔曼滤波数据融合可得鱼竿的实时姿态角, 结合图6 对鱼竿模型进行分析:当检测到鱼竿的俯仰角的倾角偏差大于或等于 θ1时判断为有鱼咬钩, 此时系统开启智能报警功能, 同时检测遛鱼功能是否开启, 若开启遛鱼功能, 则将当前鱼竿倾角偏差与偏差角 θ2做 比较, θ2为控制电机正反转的临界值, 当倾角偏差小于 θ2, 则需要控制器控制电机正转, 达到收线的目的, 对鱼竿和鱼组成的力学模型分析可知,当鱼竿加速收线时, 由于鱼的重力及向反方向的拉力会使得鱼竿倾角偏差不断加大, 当倾角大于 θ2时, 则应控制电机反转, 实现放线的目的, 当鱼竿快速放线时,鱼竿的倾角偏差会逐渐减小, 在鱼竿的不断循环往复的收放线的过程中实现消耗鱼的体力的目的.θ3为鱼线处于极限拉力值时鱼竿所对应的偏差角, 当拉力值大于该鱼线的极限拉力值时, 就会导致断线跑鱼, 所以在遛鱼过程中对于收放线的时间和鱼线拉力值的控制都有较高要求, 基于以上分析, 该控制系统需要通过角度的偏差来实现系统的控制, 因此本文采用串级PID 算法来实现智能遛鱼功能.
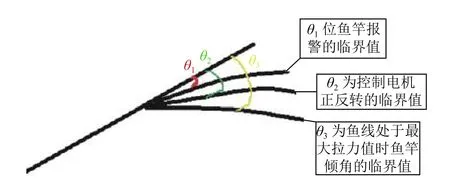
图6 鱼竿倾角示意图
3.4.1 串级PID 控制模型的建立
本文采用双环PID 控制系统, 即外环采用角度环,内环采用角速度环, 角速度环的加入将更加准确的表示鱼竿姿态, 使控制系统更加稳定.与传统的单环PID 控制器相比, 增强了控制系统对外界的抗干扰能力, 提高了控制精度.智能钓鱼竿串级PID 控制流程图如图7 所示.
3.4.2 串级PID 控制系统Simulink 仿真
本文中采用以角度作为外环控制, 角速度作为内环控制的串级PID 与以角度作为控制量的单环PID 控制作比较.从而验证串级PID 控制的优越性.在该系统仿真中输入量为指定的角度, 输出为经过串级PID 控制输出的角度, 该系统将以阶跃信号为输入进行系统仿真, 通过参考飞行器的数学模型的推导, 在这里假设该俯仰角、翻滚角及偏航角的传递函数分别为:

可建立单级和串级PID 下俯仰角和翻滚角Simulink仿真结构如图8.

图7 串级PID 控制流程图
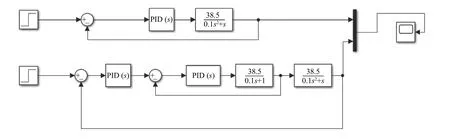
图8 单级和串级PID 下俯仰角和翻滚角仿真结构图
可建立单级和串级PID 下偏航角Simulink 仿真结构如图9.
俯仰角、翻滚角的单极与串级PID 仿真结果对比如图10 所示, 图中红线为单级PID 仿真波形, 蓝线为串级PID 仿真波形:
偏航角的单极与串级PID 仿真结果对比如图11所示.
由图10 和图11 仿真结果图可见, 在输入信号为阶跃信号的控制系统中, 单极PID 控制下系统的超调量和振荡次数明显大于串级PID 控制下系统的作用,因此串级PID 控制系统下控制信号更稳定且响应速度更快.
3.4.3 PID 参数整定
本节采用试凑法对串级PID 参数进行整定.试凑法是根据以往经验依照先内环、后外环、先比例、后积分再微分的步骤来实现参数整定.由于参数整定过程类似, 本节以俯仰角为例进行调试.
首先整定内环PID 参数, 比例参数Kp=4 时, 此时系统振荡剧烈, 系统严重超调, 此时应减小Kp 的值.Kp=1 时系统需要很长时间才能恢复到1 值, 说明Kp 值偏小, 因此可初步判断Kp=3 时较为合适.但是单纯的比例调节无法使系统快速稳定, 还应加入积分调节, 调节依据是若系统误差消除较慢, 此时应当适当减少积分时间, 增强积分作用.此时系统可以较快的消除误差, 但系统超调量较大, 此时应加入微分作用减少超调量, 加入微分控制量能一定程度上抑制超调量.

图9 单级和串级PID 下偏航角仿真结构图

图10 俯仰角和翻滚角仿真结果对比图

图11 偏航角仿真结果对比图
由于PID 参数的调试是一个参数间相互耦合的过程, 所以在调试中要不断的尝试和试凑才能得出最终理想的参数.通过反复试凑的方法, 最终确定智能鱼竿PID 控制参数如表1 所示, 最终俯仰角的PID 仿真结果图如图12 所示.
由最终的串级PID 仿真图, 可知系统在阶跃信号输入的控制系统中, 响应时间约为0.03 s, 系统稳定时间约为0.1 s 且系统超调量在10%以内, 因此该串级PID 控制系统能够快速响应并快速趋于稳定, 能较好地实现鱼竿的控制需求.
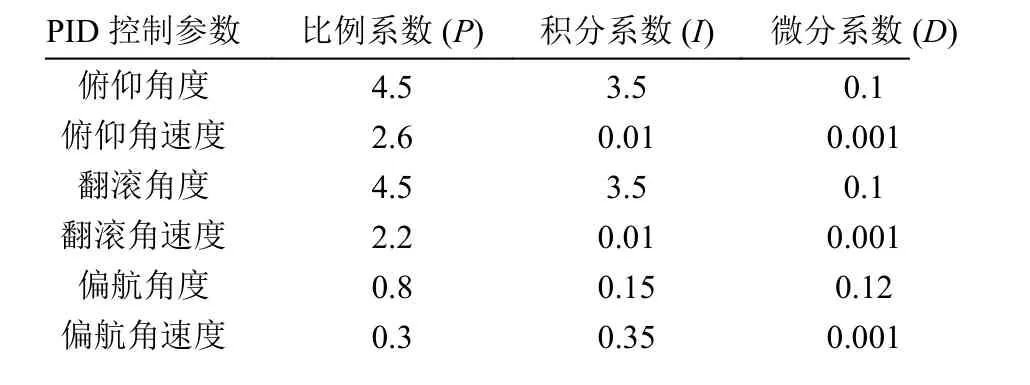
表1 智能鱼竿PID 控制参数表

图12 俯仰角PID 最终仿真结果图
4 智能钓鱼竿系统测试结果
智能钓鱼竿系统实物图如图13 所示, 考虑到鱼竿对轻便的需求, 经过调试, 实现了智能钓鱼竿的相关基本功能, 如智能报警功能.该智能钓鱼竿设计成本低廉且功能实用, 具有较好的实用价值和广阔的市场前景.
4.1 姿态角测试结果
由姿态传感器数据处理得到精确的姿态角是控制系统的基础, 其测量结果的准确性对于实验结果准确性有很大的影响.
由于陀螺仪和加速度计均存在不同频段的噪声而导致在检测过程中产生一定的误差, 所以本系统采用了卡尔曼数据融合方式来降低误差, 图14 为传感器静止时, 最终解算出的欧拉角波形.

图13 智能钓鱼竿整体实物图

图14 静止时解算的姿态角波形图
由图14 可知, 蓝色曲线表示翻滚角, 黄色曲线表示俯仰角, 红色曲线表示航向角, 传感器水平静止放置时, 姿态角的初始值曲线相对平滑且俯仰角和翻滚角角度均接近零, 说明本文中通过卡尔曼数据融合算法最终得出的姿态角相对精确且噪声较小.
图15 为智能钓鱼竿实际运行时姿态角变化波形图, 航向角的量程范围为-180°到+180, 则从-180°变化到+180°时, 角度会突变.由图可知在7-8 s 的时间段内Yaw 出现了从-180°到+180°的突变, 因此在智能钓鱼竿姿态控制时会对该处进行平滑处理.

图15 角度突变时解算的姿态角波形图
4.2 智能鱼竿报警功能测试
智能鱼竿的报警是依据俯仰角的变化作为咬钩信号的判断, 当鱼竿俯仰角的变化在10 度以上时, 则认为此时有鱼咬钩, 且可以通过调节报警阈值来改变智能钓鱼竿报警的灵敏度.对测试数据进行统计得出表2.
分析表2 可知, 当翻滚角和偏航角保持不变时, 俯仰角度变化大于10 度时鱼竿报警, 俯仰角变化小于10 度时, 鱼竿不报警, 当俯仰角度不发生变化时, 无论翻滚角和偏航角如何变化, 鱼竿均不报警, 且由表中数据分析可知鱼竿倾角变化在较接近10 度时依然可以很准确的发出报警信号, 这也从侧面证明姿态解算出的姿态角精度较高.

表2 鱼竿报警数据分析表
5 结论与展望
本文以微处理器STM32 为核心搭建uC/OS-II 操作系统, 通过四元数法对鱼竿姿态解算, 提出基于卡尔曼滤波的数据融合算法, 并以串级PID 控制算法实现了鱼竿控制系统的智能控制, 并通过Matlab 建立Simulink仿真, 验证了串级PID 控制器的有效性.通过实验测试最终达到了本设计的预期功能.
