柔性制造系统中智能运送机器人的设计与实现*
2020-03-20成文娟陈银树尹序臻江永鑫
成文娟,陈银树,尹序臻,江永鑫
(厦门理工学院 电气工程与自动化学院,福建 厦门 361024)
制造业是衡量国家综合实力的重要标准,近年来随着电子、汽车、快递、电商等行业的发展,物流仓储行业也得到了迅速发展。但是,由于订单数量与种类激增使商品拣选任务繁重,从而导致出错率高、成本高,甚至在特殊情况下,已经是人力所不及,可以说,传统的仓储系统面临着诸多挑战。
在“中国制造2025”的推动下,柔性制造业迎来了重大的发展,这也是构建未来智能工厂的基石[1]。对此,本文提出一种基于柔性制造系统的智能物料运送机器人的设计与实现,该机器人可自动识别需要搬运的物料并运送至指定目标区域。该机器人具有接受、规划、协调和控制的功能,这对改进生产过程和实现管理的自动化,减少员工的工作量和失误,提高劳动生产率及降低生产成本有至关重要的意义[2]。
1 系统整体方案设计
本设计以STM32F103C8T6作为控制核心,通过OpenMV机器视觉模块扫描二维码读取工作地点的信息,利用STM32PWM设置定时器,控制PWM信号通过L298N驱动底部直流电机和控制前部机械手舵机,从而完成抓取、移动、卸货等操作。机器人整体系统结构框图如图1所示。

图1 智能运送机器人系统结构框图
整体的技术路线具体如下:
⑴ OpenMV摄像头实时捕捉二维码的信息传递给单片机;
⑵ STM32F103C8T6单片机控制小车底部电机,到达抓取目标物料的位置;
⑶ OpenMV识别物料;
⑷ STM32F103C8T6单片机控制舵机,利用舵机的转动执行带动机械爪进行分离闭合,控制机械手抓取物品。
2 硬件设计
2.1 硬件模块清单
智能运送机器人硬件模块相关型号和参数具体见表1。
2.2 硬件设计
智能运送机器人的主框架主要以亚克力板为材料,直流电机选用“Z”字形减速马达(24 V/540转),为机器人留有足够的安全裕度容量的同时提高兼容性,内置电压转换电路,即DC/DC模块又充当了电压变化器的作用,可将12 V锂电池电压降成5 V为STM32单片机及直流电机供电[3]。
该机器人的硬件电路主要包括:STM32F103C8T6、OpenMV机器视觉模块、电机驱动模块、基于LM2596S的DC-DC降压模块等硬件组成,硬件设计如图2所示。
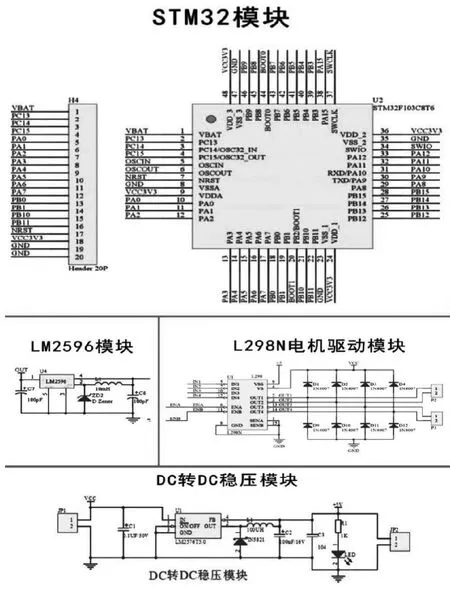
图2 硬件电路图
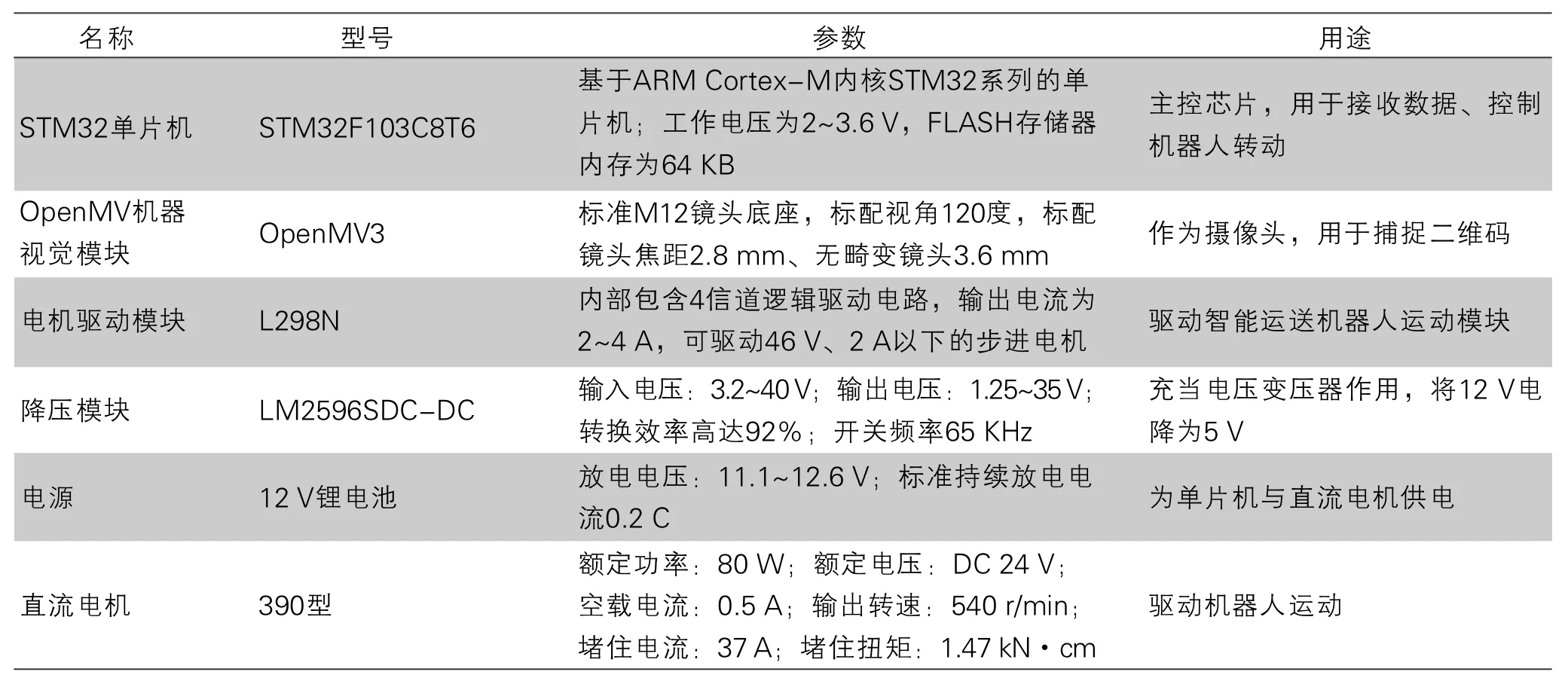
表1 智能运送机器人各硬件模块及其参数表
3 软件设计
本设计的软件采用模块化程序的设计思路,整体程序主要包括利用OpenMV视觉库用Python书写视觉库和控制机器人的程序。视觉子系统又分为图像采集子模块、图像预处理子模块、图像分析子模块3个子模块组成[4]。软件部分主要为机械手舵机控制、底部移动小车电机控制以及图像识别3部分。
3.1 机械手舵机控制
在系统程序初始化阶段,需要配置TIM4和TIM3为PWM输出模式2,使所用通道的预装载通过配置T_period和T_prescaler得到输出的PWM信号频率为50 kHz,频率计算方法为:
取T_period为2000-1,即1999,取T_prescaler为720-1,即719。通过改变T_puls即可控制舵机转角,T_puls变化范围在50~250 之间,若超出,很可能会永久损伤舵机,在调试时应当警惕。该智能物料运送机器人舵机控制流程图如图3所示。
3.2 底部移动小车电机控制
初始化4个引脚,每2个分别来控制其中的一个电机的方向,设置一个定时器来控制PWM信号占空比,tim=pyb.Timer(4,freq=1000),即通过定时器来控制电机的左右转。该智能物料运送机器人底部移动小车电机控制流程图,如图4。
3.3 图形识别
图像识别以OpenMV作为主体硬件识别。OpenMV搭载MicroPython解释器,这允许在嵌入式上使用Python来编程(Python 3 to be precise)。Python是机器视觉算法的编程。
3.3.1 二维码识别
二维码识别采用软件畸变矫正,对图像进行畸变矫正,调用函数find_qrcode进行二维码检测。该智能物料运送机器人二维码识别流程图如图5所示。
3.3.2 颜色追踪
一个颜色阈值的结构是这样的:red=(minL,maxL,minA,maxA,minB,maxB)。我们可以在阈值编辑器里将目标颜色变成白色,其他颜色全变为黑色。只需将所要追踪的颜色阈值进行设定,便可成功进行识别所需色块。该智能物料运送机器人颜色追踪的流程图如图6所示。
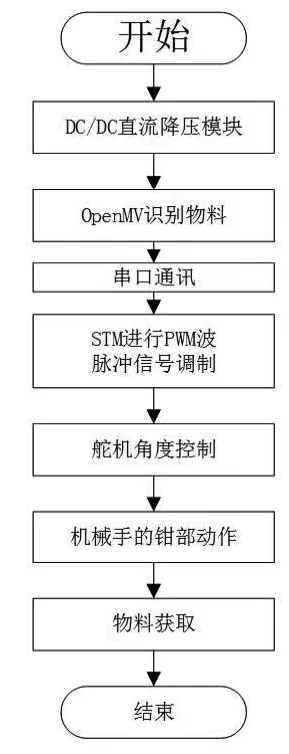
图3 舵机控制图
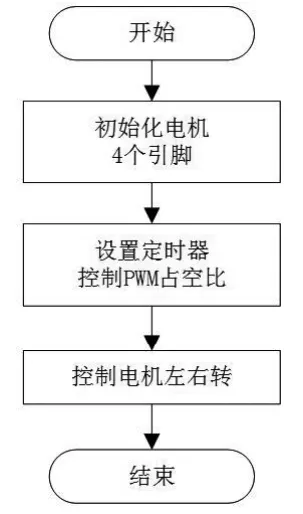
图4 底部移动小车电机控制

图5 二维码识别
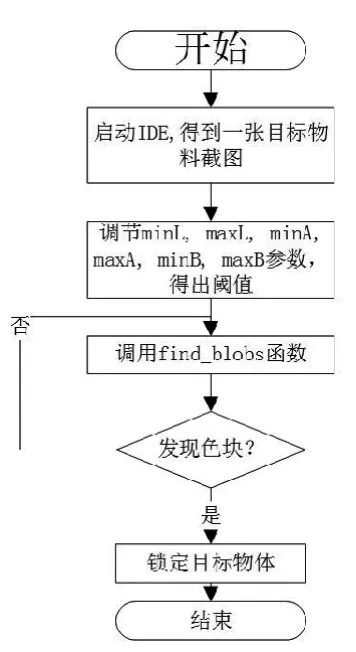
图6 颜色追踪
4 系统测试和结果验证
将程序烧入单片机后完成该智能运送物料机器人的组装,作品如图7所示。
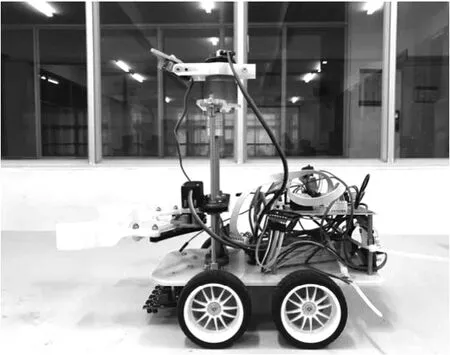
图7 智能运送物料机器人整体结构图
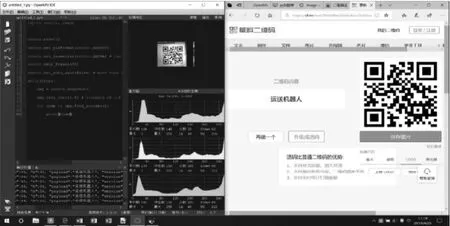
图8 二维码识别图
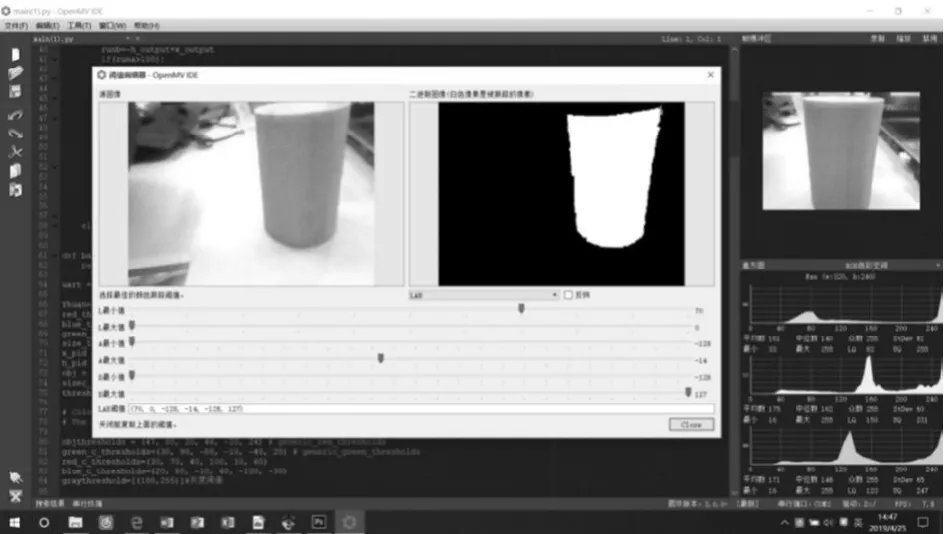
图9 识别物料颜色
对该智能运送物料机器人的功能进行测试:首先,OpenMV扫描二维码读取信息,图8为OpenMV成功识别二维码;其次,OpenMV识别物料颜色,锁定目标,图9为OpenMV成功识别物料颜色;然后,STM32单片机控制机器人移动到目标物料的位置;最后,STM32单片机控制舵机、进而控制机械手抓取物品。
经测试,所设计的智能运送物料机器人可以扫描识别二维码信息,准确的将信息传送给控制中心。其能够通过颜色追踪快速准确的锁定目标物块,然后驱动机械手抓取物料,且在发现没有符合要求的物料时,继续寻找目标物料。物料机器人移动过程中整体运行稳定,抓取准确,功耗低。
5 结语
本文设计了一种基于柔性制造系统的智能物料运送机器人,该机器人具有扫描识别二维码、颜色追踪、机械手抓取物料、运送物料的功能。该机器人运用OpenMV模块实现了扫描识别二维码、颜色追踪的功能。通过直流电机L298N来控制机器人停止、前进、左转和右转的功能。通过颜色追踪发现目标物料, STM32F103C8T6控制舵机,让机械手抓取目标物料。
与传统的人工相比,本设计解决了人工耗资在生产过程中占比重大、物料种类繁多、效率低下等一系列问题,推进了物流业由劳动密集型产业向智能化产业转型的发展。
