基于幅相不一致准则的建筑物SAR层析成像
2020-03-18解金卫李真芳王志斌
解金卫 李真芳* 王 帆 王志斌
①(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
②(南京电子技术研究所 南京 210039)
③(北京空间飞行器总体设计部 北京 100094)
1 引言
由于全天时、全天候、3维高分辨成像的特点,层析合成孔径雷达(Tomographic Synthetic Aperture Radar,TomoSAR)技术近年来受到了国内外学者的广泛关注。该成像技术的本质是在高度向上以不同的视角对同一场景或者地物进行多次观测。单次观测形成2维合成孔径雷达(Synthetic Aperture Radar,SAR)图像,多次观测在高度向上形成合成孔径,沿垂直雷达视线(Perpendicular Line Of Sight,PLOS)方向进行聚焦实现高度向上散射体分辨,从而达到对目标的3维成像的能力。相比于2维SAR图像,TomoSAR能够准确估计出同一SAR分辨单元内不同散射体的高度位置与散射强度,是解决高分辨SAR图像中建筑区叠掩问题的有效手段之一[1-8]。
实现高度向上多次观测较常见的方式有两种。一种是单次航过中载机平台上沿地距向挂载多个天线,采用1发多收模式录取回波,然后将回波等效相位中心投影到POLS方向,从而在PLOS形成合成孔径;另一种方式是单次航过自发自收,然后对场景重复多次观测,重复航过间沿PLOS向形成合成孔径,从而实现层析成像。目前,由于单个平台上挂载多个天线系统较复杂,成本太大,一般层析成像系统均选择后者获取层析成像原始回波数据[9]。
从原始回波数据到获得3维成像结果,大致可分为4个步骤。首先对获取的多航过原始回波数据进行2维SAR成像;然后,对各个航过选择一个参考图像进行精确配准,使得图像中的同名点尽可能配准到同一像素点中;其次,对SAR图像序列中像素点进行相位误差校正,目的是消除由平台摄动、大气延迟(包括对流层和电离层)引起的相位偏差;最后,利用特定的聚焦方法沿PLOS方向对目标像素进行成像,从而提取出高度向散射点的位置和散射能量[10,11]。
对于层析维聚焦方法,即TomoSAR成像。目前,应用较为广泛的技术有两种,一种是基于谱估计方法,如快速傅里叶变换法(Fast Fourier Transform,FFT)[12]、Capon谱估计[13]、Music谱估计[14]、截断奇异值分解法(Truncated Singular Value Decomposition,TSVD)[15]等;另一种是基于压缩感知(Compressive Sensing,CS)方法,如正交匹配追踪法(Orthogonal Matching Pursuit,OMP)[16]、L1范数正则化法[17]、双步迭代收缩阈值法(TWo-step Iterative Shrinkage/Thresholding,TWIST)[18]等。FFT方法计算效率较高,但是当垂直有效基线分布不均匀时,高程向旁瓣严重恶化。Capon谱估计和Music谱估计都能有效抑制旁瓣得到较高的高程分辨率,但是这两种方法都要估计观测信号的协方差矩阵,不仅降低了距离-方位向的分辨率,而且在高分辨率建筑物场景下相邻分辨单元散射特性很难满足独立同分布假设。TSVD通过测量矩阵的奇异值分解对高程向散射点进行估计,为了避免小奇异值造成误差传播,需要对分解得到的奇异值进行截断处理。但该方法的缺陷是只有在奇异值呈良态分布时才能获得稳定的层析解,当奇异值呈现病态分布或者测量矩阵的秩为非良置时,TSVD方法并不适用。对于基于CS方法的层析成像,不仅具有较强的旁瓣抑制能力同时在高程向具有超高的分辨率。但多数CS方法需要经过模型选择对PLOS向散射点数量进行预先估计,且为了得到模型的全局最优解需要不断迭代调整正则化参数,导致这类方法计算量非常大,运算效率低下。无论谱估计还是CS方法,除了上述所述缺陷外在高程向聚焦时均需要进行解斜处理。解斜的本质是去除参考斜距引起的相位将PLOS向角频率支撑域校正到零频附近。该操作过程需要对SAR图像上每一像素点进行PLOS方向的垂直有效基线估计,且相位去除过程中存在近似,可能导致去斜不精确,从而影响层析成像效果。
针对高分辨率重复航过机载SAR的层析成像,为了避免上述方法的缺陷和解斜处理操作。本文引入沿PLOS向进行搜索的空域波束形成(Beam Forming,BF)方法进行层析聚焦。该方法类似于后向投影法层析成像,是一种空域相干累加的方法,由于不做任何的理想假设,能够很好地抑制旁瓣干扰,并对PLOS向散射点的位置进行精确估计。对于高分辨率SAR图像,由于城区建筑物结构复杂,不同航过SAR图像间存在观测视角差异,并且SAR图像存在相干斑噪声影响,SAR图像中的所有同源点不能在相同的像素点同时进行精确地配准[19]。为了从幅度和相位两个方面找出聚焦相干累加时最相关的像素点,提出了一种联合参考像素窗口中邻域像素点的幅度和相位来判断目标像素点的不一致性准则。以某一航过为参考,由不一致性准则可以提取出相应的同名像素点,实现对层析成像的精确聚焦。图1给出两幅天线中叠加主天线同一分辨单元内的散射点的回波包络示意图。
本文结构如下:第2节介绍层析成像模型和基于空域波束形成的层析成像算法;第3节给出联合幅度和相位不一致准则,并结合该准则给出层析成像全流程;第4节,给出了层析成像的详细流程;第5节利用仿真数据和机载实测数据对算法进行了验证;最后,对全文进行了总结。
2 层析成像模型与算法
2.1 层析成像模型
单航过SAR图像中某一像素点内复数据为不同高度向上散射点散射信号的相干叠加。以Pn(1≤n ≤N)表示第n次航过对应雷达观测位置,选择某一航过雷达观测点为参考观测点,TomoSAR成像几何如图2所示。x轴表示地距向,y轴表示方位向,z轴表示高程向,r为斜距向,s为PLOS方向。则像素点(y,r)处的2维SAR图像复数据可表示为[20]


图1 同名像素点失配示意图Fig.1 Illustration of misregistration for homologous points
其中,y,r,s分别表示散射点距离、方位和俯仰向位置,γ为目标在该像素点上俯仰向散射系数分布函数,Rn代表第n次航过雷达和目标间的距离,s0表示PLOS方向不模糊高度,λ为波长。根据图2的几何关系,由波恩近似,斜距Rn可表示为[21]

传统谱估计和基于CS层析成像方法都需要对观测数据进行解斜处理,即对式(2)第1,2项引起的相位项进行去除。去除第1项,目的是去除与目标斜距有关的相位项;去除第2项,目的是使得信号空间频率与观测点位置无关只与散射点目标高度有关。解斜后2维SAR图像复数据可重新表示为[22]

由于解斜处理中需要得到估计得到每次航过相对于参考航过的平行和垂直雷达视线方向精确的基线分量。为了避免该操作,本文利用沿PLOS向进行搜索的空域BF方法进行层析聚焦。该方法本质是将式(1)中各个航过斜距引起的相位项补偿然后进行相干叠加。在POLS向搜索当相干累加值达到最大,对应俯仰向位置,即散射点高程位置。
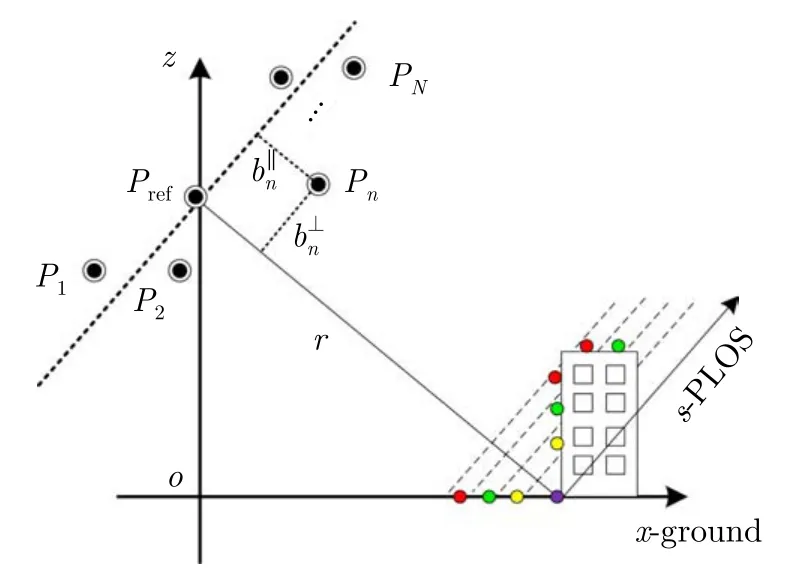
图2 层析成像几何示意图Fig.2 Illustration of TomoSAR imaging
2.2 基于空域波束形成的层析成像
当所有重复航过2维SAR图像相对于参考航过SAR图像配准处理后,像素点(y,r)处所有2维SAR图像复数据可表示为一个矢量形式

对于像素点(y,r),沿PLOS方向某一固定高度sk处,可以构造一个导向矢量

其中,导向矢量元素an(sk)可表示为

其中,Rn(r,sk)为高度sk的目标点到第n次航过雷达天线间的距离。由此,可得到sk处的聚焦信号为

设PLOS方向被均匀离散化为K个散射高程,高程值依次为s1,s2,···,sk,···,sK。沿PLOS向顺序扫描得到高程向最终层析聚焦结果为

其中,扫描间隔∆s=sk+1−sk与PLOS向成像分辨率ρs有关。一般雷达系统中选择过采样率为1.2~2.0,因此,扫描间隔∆s ∈[0.50ρs,0.83ρs]。由式(7)可知,基于空域BF方法的层析成像不依赖于成像几何,无需估计基线进行解斜处理,也没有任何近似假设。因此,适用于航过非均匀分布下的层析成像。
3 联合幅度和相位不一致准则
高分辨重复航过SAR图像间视角差异较为明显,叠加在主图像同一分辨单元内不同高度向上的散射点在其他航过SAR图像上可能会分散到该分辨单元周围其他像素上,且受相干斑噪声的影响该分辨单元内不同航过间的信号的幅度和相位差异也很大。由于空域BF搜索成像以所有航过同名点均配准到一个像素上为前提。为了在其他航过SAR图像目标分辨单元周围找到与主图像该分辨单元像素幅度和相位最相关的像素点,本文提出一种联合SAR幅度和相位的不一致性准则。
首先,选择某一航过(如PLOS向位置为0的航过)SAR图像上像素(y,r)为参考分辨单元。由此,得到该像素与其他航过SAR图像上以该像素为中心的窗内所有像素点的归一化幅度差异为

其中,p,q分别为航过和窗内像素点序号。M为窗内所有像素总数。理论上,当窗内像素幅度与参考像素点幅度相等时∆Apq=0,两像素间幅度相关性越大,越接近理想散射强度。因此,基于幅度进行最优像素点选择时,可以考虑最小化归一化幅度差异进行选择。对于不同航过间同名点的相位差异,理想情况下为雷达观测点到目标点间的斜距差异引起相位差异。补偿掉该相位差异后得到的参考航过目标像素与其他航过SAR图像上以该像素为中心的窗内所有像素点的归一化相位差异为
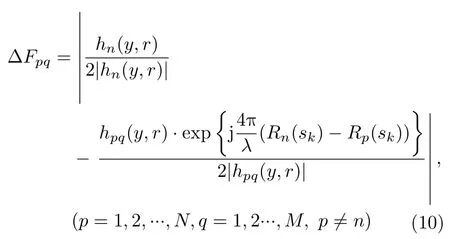
式(10)分母中系数2目的是保证归一化相位差异的值域为[0,1]。显然,归一化幅度差异的值域也为[0,1]。同样,∆Fpq=0时,得到的像素为选择出的最优像素点。实际中,由于噪声等影响,由上述归一化幅度差异和归一化相位差异最小化搜索得到的像素一般都不是同一个像素点,为了联合两种归一化差异,这里引入灰色绝对关联度r,提出一种联合幅度和相位(Joint Phase and Amplitude,JPA)的不一致准则为

由此,同名点选择可由优化式(12)得到

式(11)中,r描述了归一化幅度差异和归一化相位差异之间的相似程度,值域为r ∈[0,1]。当二者完全相似时,r为1,此时无论使用归一化幅度差异还是归一化相位差异均能得到相同的最优同名点;当二者完全不相关时,r为0,此时,认为相位归一化差异寻找同名像素点更具有可靠性,不一致准则最小只依赖归一化相位差异。文献[23]给出了两组序列灰色绝对关联度r的求解方法,本文不再赘述。将获取的所有航过的最优同名点代入式(7),得到sk处的层析聚焦信号,遍历PLOS向上所有高程值,得到3维层析成像结果。
4 层析成像流程
由上述3维成像过程的分析,以及所提JPA不一致准则成像方法,本文给出层析成像的详细步骤如下:
步骤 1 将所有航过录取的原始回波数据根据POS数据运动补偿后进行成像处理得到2维SAR图像序列;
步骤 2 选择某一航过(如第n航过)2维SAR参考图像作为主图像,将其它航过SAR图像均配准到主图像上;
步骤 3 相对于参考图像,对其它航过配准后SAR图像做辐射定标处理。当场景中存在孤立的强散射点或者人工布设的角反射器时,可利用文献[20]中的独立特显点方法校正层析成像中由姿态误差、噪声引起的相位误差。在场景中独立特显点较少甚至没有的情况下,可借鉴差分干涉中的大气相位去除方法,采用永久散射体(Persistent Scatterers,PS)网格上的相位误差在空间上具有较强的相关性特性,利用基于相位梯度自聚焦算法的相位误差补偿方法进行残余误差校正[24]。对SAR图像序列中像素点进行相位误差校正的目的是消除由平台摄动、大气延迟(包括对流层和电离层)引起的相位偏差;
步骤 4 选择主图像上一点(y,r)为目标像素点T,利用主图像对应航过POS对该像素点进行定位得到该像素地心地固坐标系下(WGS84)坐标;
步骤 5 以目标像素T为坐标原点将所有航过的POS位置和3维载机速度矢量经过平移、旋转。更新得到垂直于地球的切平面的方向为z轴方向,速度方向为y轴方向的坐标系下的POS位置和3维载机速度矢量。求解以目标点为坐标原点新坐标系下的POS位置和3维载机速度矢量目的是为了构建3维成像网格便于搜索BF层析成像;
步骤 6 以目标像素T为坐标原点,在斜距为r的分辨单元上构造高度向成像网格。高度向沿垂直于视线方向,即PLOS方向。网格大小由高程分辨率ρs决定,∆s ∈[0.50ρs,0.83ρs];
步骤 7 选择PLOS向上某一网格点k为高度向上某散射点,利用该散射点在新坐标系下对参考航过进行反向定位处理,得到目标在参考航过下0多普勒处POS位置,并有由此计算出目标点在参考航过下回波参考最近斜距Rref。由Rref,(y,r)处各航过复信号值,结合式(7)、式(11),找出(y,r)中所有航过SAR图像上的同名点,标记为hk。其中,同名点计算过程中窗大小选择5×5;
步骤 8 利用同名点hk遍历PLOS向每一网格点,由式(7)、式(8)得到参考斜距为Rref时PLOS向聚焦能量,记为gref;
步骤 9 判断PLOS向参考目标是否为真实3维位置。若是,则gref为最终3维成像结果。反之,判断gref的峰值是否最大。若是,则标记该网格位置k′为真实参考目标3维位置,将该网格点k′替代步骤7中k,重复步骤7-步骤9;反之,遍历PLOS向上其它网格点,重复步骤7-步骤9。
为了直观理解,本文给出层析3维成像的流程图,如图3所示。
5 实验结果与分析
5.1 仿真数据实验
为了验证所提3维层析成像方法的有效性,本节给出了重复航过机载SAR点目标仿真3维成像结果。本实验的目的是验证当待成像目标点在辅航过SAR图像上相对于主航过SAR图像目标点(y,r)扩散到其邻域像素中时,即所有航过同名点不在同一像素内时,利用JPA不一致准则依然可以进行精确3维聚焦。本实验假设同名点随机扩散到以(y,r)为中心像素的5×5大小的窗内。计算幅度和相位不一致准则时同样选择窗大小为5×5。点目标高程设置为s=0 m。3维层析成像的参数设置如表1。
为了充分验证本方法的有效性,下面分3种情形对点目标在PLOS方向上的成像结果进行对比。实验采用所有航过均直接利用(y,r)像素点上的SAR信号进行搜索BF层析成像与考虑JPA不一致准则的搜索BF层析成像两种方法。为了简便起见,前者用NJPA表示,后者用JPA表示。
情形1 不同数量航过下,点目标发生扩散或偏移。考虑3种情况:(1)只有2个连续的航过点目标发生扩散;(2)有10个连续的航过点目标发生扩散;(3)除参考航过外其余航过(20个)中点目标均发生扩散。
情形2 点目标发生扩散的航过数相同,均为6航过,仅点目标发生扩散或偏移的航过序号不同。考虑3种情况:(1)前6个航过点目标发生扩散;(2)中间6个航过点目标发生扩散;(3)两端各3个航过的点目标发生扩散。
情形3 除参考航过外其余航过(20个)中点目标均发生扩散,且SAR图像中存在高斯白噪声。考虑3种不同信噪比(Signal to Noise Ratio,SNR)情况:(1)SNR=0 dB;(2)SNR=10 dB;(3)SNR=20 dB。
图4为情形1、情形2下发生点目标扩散现象的航迹分布情况。情形3航迹分布形式与情形1中情况(3)一致。因此,图4中不再重复给出该情形下航迹分布形式。

图3 层析成像流程图Fig.3 Flowchart of TomoSAR imaging

表1 仿真参数Tab.1 Simulation parameters
图5给出了情形1中点目标发生扩散的3种航迹分布形式下,NJPA和JPA层析成像结果。由图5(a)知,从左往右只有边缘两个连续的航过内像素发生偏移时,搜索BF方法中NJPA得到的点目标成像结果变化不大,成像结果幅度满足标准sinc型函数。由图5(b)知,从左往右有10个连续的航过内像素发生偏移时,搜索BF中NJPA得到的成像结果明显恶化,由于接近1/2航过中像素点非同名点,相干积累误差较大,搜索BF后导致主瓣展宽,最近旁瓣出现吸纳到主瓣内的现象。此外,除最近旁瓣外其它旁瓣均低于最近-15 dB,原因是同名点偏移引入的误差等效于航迹间发生扰动,即基线为非均匀基线排列形式,前10次航过间的波束进行参差累加,旁瓣能量相互削弱,导致旁瓣降低。由图5(c)知,当除了参考航迹外其他航迹均发生像素偏移时,由于误差较大,搜索BF聚焦后点目标的旁瓣明显升高到了-10 dB左右。对比上述结果,由图5(d)、图5(e)和图5(f)可知利用JPA搜索BF方法3种航迹分布下得到的成像结果均一致,满足标准sinc型函数。表明利用JPA方法在这3种航迹分布情况下均能找到同名点,搜索BF结果不受点目标发生偏移的航迹数目影响。图6给出了情形2中点目标发生扩散的3种航迹分布形式下,NJPA和JPA层析成像结果。由图6(a)知,前6个连续的航过内像素发生偏移时,搜索BF方法中NJPA得到的点目标成像结果中成像结果幅度不满足标准sinc形式,主瓣周围旁瓣下降而离主瓣较远处的旁瓣则上升。与情形1中航迹分布形式相比,结果明显比只有2航过点目标发生偏移的情况差,但是较10航过点目标发生偏移的情况要好,没有发生旁瓣吸纳到主瓣内的情况。图6(b)显示,当除了参考航迹外中间6个航迹内像素点发生偏移时,主瓣附近旁瓣明显上升,达到了-7.5 dB。图6(c)显示,当发生像素点偏移的航迹分布在两端时,NJPA得到的点目标成像结果主瓣和主瓣附近旁瓣变化不大与标准sinc相似,主瓣远处旁瓣出现抬高现象。由图6(d)、图6(e)和图6(f)可知,情况2中利用JPA搜索BF方法3种航迹分布下得到的成像结果均一致,满足标准sinc型函数。表明利用JPA方法在这3种航迹分布情况下同样均能找到同名点,搜索BF结果不受点目标发生偏移的航迹分布位置影响。由上述分析可知,对于NJPA方法的搜索BF层析成像,只有当发生像素扩散的航迹较少且处于航迹分布的边缘时,非同名点引入的误差才对成像结果影响较小。而利用JPA方法的搜索BF层析成像中,除参考航迹外无论有多少航过发生点目标偏移,无论点目标偏移的航过如何分布均能得到较好的聚焦结果。

图4 不同情形下航迹分布情况Fig.4 Tacks distribution of TomoSAR under different circumstances
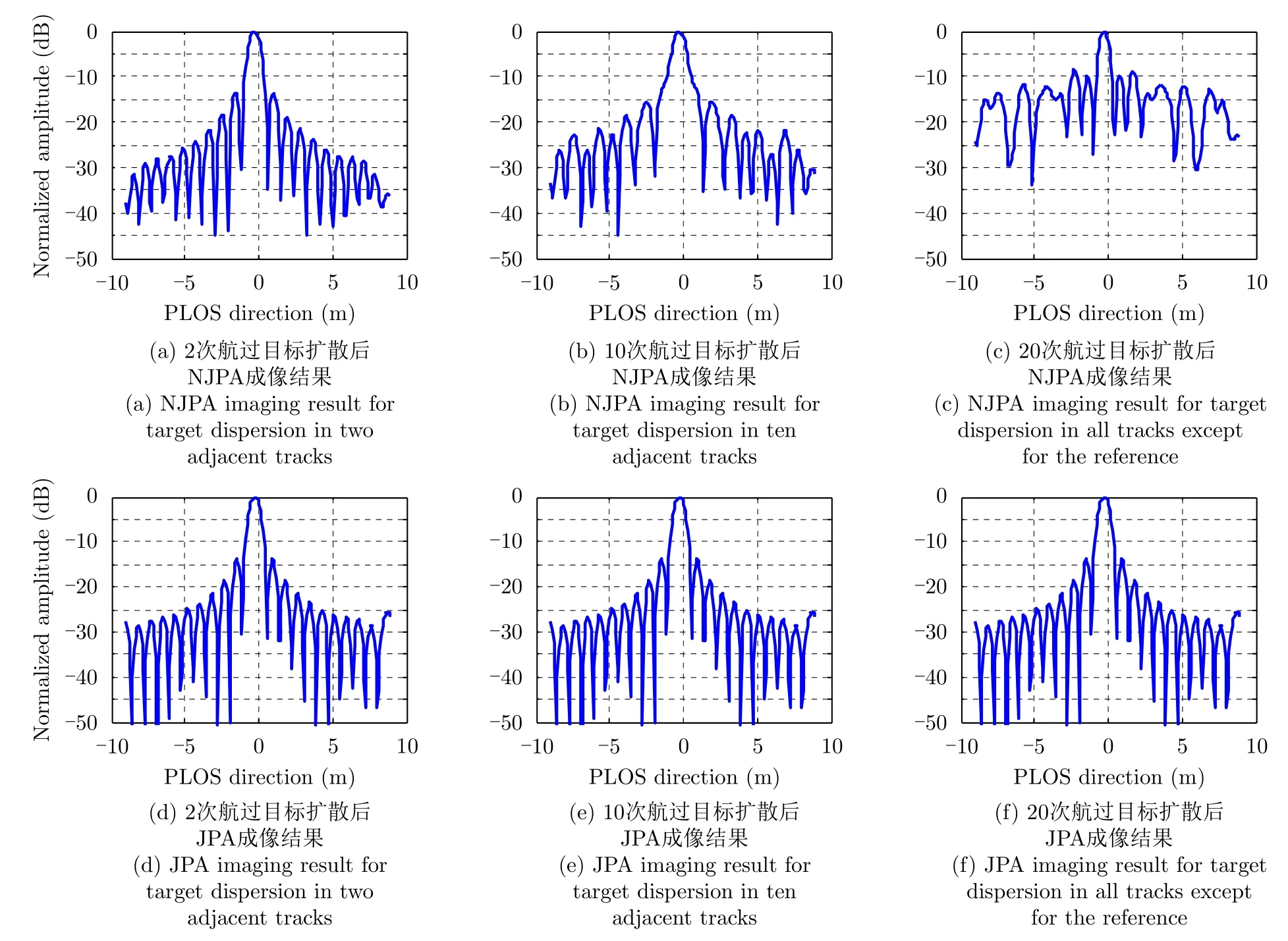
图5 情形1中3种航迹分布下不同成像方法对比Fig.5 Comparison between different TomoSAR imaging for three tracks distributions under circumstance one
为了能够反映实际情况下JPA方法搜索BF层析成像的有效性,情形3考虑了除了参考航过外其它航过均发生点目标偏移的情况下,所有航过存在3种不同信噪比(0 dB,10 dB和20 dB)的高斯白噪声时成像效果。对比NJPA和JPA层析成像结果,图7结果表明,在除了参考航过所有航过像素点发生偏移的情况下,利用NJPA搜索层析成像,无论SNR多大聚焦结果都较差,旁瓣均接近-10 dB左右。表明聚焦该方法下聚焦效果与SNR相关性不大。而利用JPA的搜索层析成像无论哪种SNR下,都能得到较好的聚焦结果,表明该情形下该方法聚焦效果也与SNR相关性不大。原因是同名点虽然受到噪声污染,但是JPA能够找出与无噪声污染时同名点幅度和相位最相关的像素进行搜索层析成像。
5.2 实测数据实验

图6 情形2中3种航迹分布下不同成像方法对比Fig.6 Comparison between different TomoSAR imaging for three tracks distributions under circumstance two
为了进一步验证本文所提方法的有效性,下面给出利用高分辨机载重复航过SAR录取的实测数据对建筑物进行JPA搜索层析成像的结果。本次试验数据为2017年在中国陕西省利用X波段机载系统对同一地区某建筑物进行多航过重复观测得到的单视SAR原始回波数据。2维SAR分辨率大小为0.5 ×0.5 m。重复观测次数为7次,航过PLOS向基线跨度为54.62 m,参考斜距10.65 km,由ρs=λr/(2·∆b)计算可得层析向分辨率为3.05 m。X波段机载实测数据的系统和场景参数如表2所示。图8为场景光学图和对应SAR图像。红色椭圆框内为观测目标建筑。
图9为图8中目标建筑区截取部分建筑散射信息的所有航过(7次航过)SAR图像,可以看出,经过配准后的SAR图像建筑区的散射轮廓并不完全相同。由于相干斑噪声的影响,所有航过同一像素点上的散射强度差异很大,即同一像素点上的同名点可能会扩散至周围其他像素点上。直接利用NJPA方法的搜索层析成像可能导致该像素点处的聚焦并不能达到相干积累的目的。而利用JPA方法进行搜索层析成像能最大程度找到与参考像素最相关的像素,即最大程度得到无像素偏移时的多航过SAR复数据,从而达到对同名点的相干积累的目标。
图10为利用NJPA和JPA方法对图8中某方位时刻红色线段部分所有像素点进行搜索层析成像后,距离-高程向的2维剖面图。图10(a)显示,受同名点扩散的影响,NJPA方法搜索得到层析成像结果聚焦效果较差,得到最高峰值处聚焦能量为2.7×104较JPA方法得到的最高峰值处聚焦能量(3.1×104)低(图10中白色椭圆内散射点),表明JPA比NJPA更容易得到所有航过间的同名点。为了更加直观对比JPA和NJPA得到的效果,选取图10中距离向23.44 m处的层析聚焦结果,其归一化剖面图如图11所示。利用NJPA方法得到散射轮廓最高峰值处位置在15.63 m,利用JPA方法得到的峰值位置在16.88 m。而本次实验区目标建筑的参考高程为18 m。可见JPA方法得到的峰值位置更加接近实际高度。另外,两种方法在高程为8 m附近都有明显峰值出现。表明该高度处有较强的散射点。该散射点可能来自建筑物垂直于视线方向的侧面墙体的散射,与建筑物顶部的散射点叠加在一起。
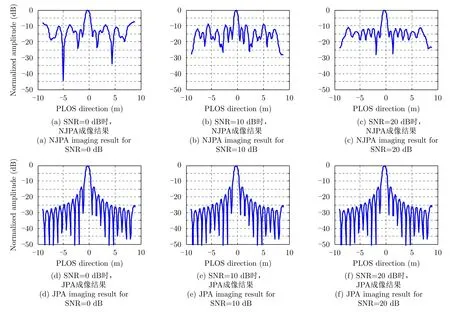
图7 情形3中不同信噪比下不同成像方法对比Fig.7 Comparison between different TomoSAR imaging for different SNR under circumstance three

表2 X波段机载实测数据参数Tab.2 Parameters of the X-band airborne SAR sensor
按照上述方法,对图8中椭圆内建筑区所有方位向进行层析成像,并在一定的幅度阈值内取出峰值位置作为强散射点,得到两种方法搜索层析成像后的3维散射点分布图如图12所示。图12(a)为NJPA方法聚焦后的3维散射点分布结果,图12(b)为JPA方法聚焦后的3维散射点分布结果。NJPA得到的散射点数目较少且3维分布较为杂乱,而JPA方法得到的散射点数据较多,且能明显看出散射点在4个高程值附近分布,分布较多的4个高程范围分别0~2 m,5~8 m,15~17 m,19~20 m。其中。从下往上,第1层分布较多的散射点可能来自地面散射或者地面与建筑物垂直于视线方向的墙面构成的二面散射;第2层分布较多的散射点来自建筑物垂直于视线方向的较低处墙面的单次散射或者来自较低处阳台的二面散射;第3层分布较多的散射点来自建筑物垂直于视线方向的较高处墙面的单次散射或者来自较高处阳台的二面散射,第4层来自建筑物顶部散射。综上所述,JPA方法较NJPA方法搜索层析成像得到的3维散射点分布更易反演出建筑物的轮廓,从而提取出建筑物高程。
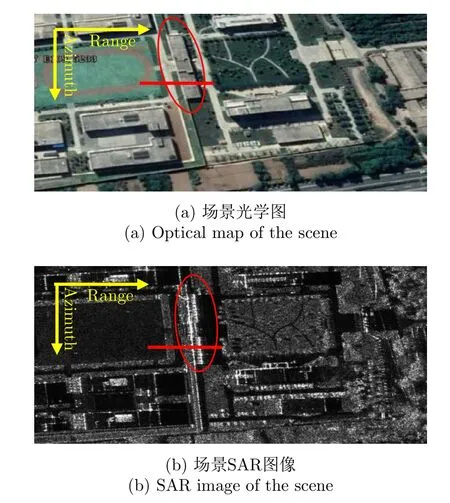
图8 重复航过TomoSAR成像试验Fig.8 Campaign of multipass TomoSAR imaging
6 结束语

图9 所有航过局部SAR图像Fig.9 Local SAR images of all the tracks

图10 不同方法层析成像剖面图Fig.10 TomoSAR Section with different methods
为了避免传统层析成像中解斜处理操作该操作本文采用沿PLOS向进行搜索的空域BF方法进行层析向聚焦。针对高分辨率SAR图像中城区建筑物结构复杂,不同航过SAR图像间存在观测视角差异,并且存在相干斑噪声影响,SAR图像中的所有同源点不能在相同的像素点同时进行精确地配准,提出了一种联合参考像素窗口中邻域像素点的幅度和相位来判断其他航过目标像素点的不一致性准则。该准则由归一化幅度和相位间的灰色绝对关联度获得,最小化该不一致准则从而提取出相应的同名像素点,实现对层析成像的精确聚焦。利用不同航过下目标像素点发生偏移的航迹组合得到的仿真数据和高分辨X波段重复航过机载SAR系统录取的实测数据进行实验验证了本文算法的有效性。实验结果表明本文所提方法能有效提高散射体在PLOS方向的聚焦能量,并精确提取建筑物的3维轮廓。

图11 距离向23.44 m处剖面图Fig.11 Local SAR images of all the tracks

图12 层析成像后散射点3维分布Fig.12 3D scatterers distributions after Tomographic imaging
