复杂场景下单通道SAR目标检测及鉴别研究进展综述
2020-03-18王兆成
杜 兰 王兆成 王 燕 魏 迪 李 璐
①(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
②(河北工业大学电子信息工程学院 天津 300401)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一种主动式微波传感器,能够实现对静止时敏目标(如坦克、装甲车、舰船等)全天时、全天候的实时远距离监测,在军事和民用领域具有重要的应用价值。近年来,随着SAR系统和成像算法的逐渐成熟,可以获得越来越多高分辨率、高质量的SAR图像[1],相应地,SAR图像解译已经成为当前SAR应用的前沿课题,受到了国内外学者的广泛关注。SAR自动目标识别(Automatic Target Recognition,ATR)技术是SAR图像解译的一个重要分支,旨在从复杂的地物场景中有效获取并识别感兴趣的目标[2],SAR ATR可以通过计算机快速、准确地完成特定的SAR图像目标识别任务,将人从海量的数据中解放出来,因而得到了广泛关注。对SAR图像中的固定战略目标,包括桥梁、机场、交通枢纽、军事基地等,可以基于惯性导航系统利用景象匹配技术实现有效的检测和定位,这有助于战场监控、任务计划、训练及目标打击效果评估。这种检测方式可以结合全球卫星定位系统,通过实时图与基准图的匹配实现对固定战略目标的精确定位,并修正惯性导航系统误差。对机动战术目标,包括坦克、装甲车、自行火炮、军用飞机、水面舰艇等,进行检测和识别,可以获取敌方的武器装备、战略部署等关键的军事情报信息,从而协助具有精确探测与控制能力的制导武器完成复杂战场环境中对这些目标的高精度打击。但是,机动战术目标的位置会随时间变化,在观测打击时又可能处于静止状态。对于运动目标的检测问题,可以在SAR成像的同时采用多通道运动目标显示或空时2维自适应处理等技术。但对于静止的时敏战术目标检测和识别,多通道信息和空域信息并没有帮助。目前,从大幅复杂SAR场景中抑制非均匀地形/海情杂波、自然杂波、民用目标的虚警干扰,实时、准确捕获静止战术目标的检测、识别手段依然缺失。
美国麻省理工学院(Massachusetts Institute of Technology,MIT)的林肯实验室最先于80年代中末期开展了SAR ATR技术研究。90年代中末期美国又公布了MSTAR研究计划和SAIP研究计划。MSTAR计划联合了多个研究机构,包括Sandia国家实验室、Wright实验室、Michigan环境研究所等,涉及0.3 m分辨率原始数据的录取、各类地貌散射杂波图的研究、18种各类地面车辆目标数据库的建立,以及特征提取、分析、分类算法设计等众多环节。MSTAR计划提供的大量0.3 m分辨率的SAR公共图像数据,已成为SAR ATR算法测试的常用数据。SAIP系统由4辆工作车组成,包括数据链、图像形成系统、图像分析工作站、以及通信与信息控制系统等,是一个典型的计算机辅助智能处理系统。在该系统中,针对SAR传感器每分钟提供的大约100 km2,1 m×1 m分辨率的图像,两个图像分析员和1个管理员可在数据接收后5 min内给出目标情报报告。美国的典型机载SAR系统,例如E-8电子战机,早在海湾战争中就发挥了巨大作用,多次指挥美军摧毁伊拉克地面部队。E-8曾在夜间发现在一小股伊拉克陆军装甲车队之后伴随的主力装甲车队,它还负责寻找伊军的弹道导弹机动阵地。它将获取的目标区域影像以及目标信息传给战斗机,使得战斗机能够准确的发起攻击。SAR系统在战场监视中的潜力已逐步显露,吸引了世界各国相继对相关技术展开研究。

图1 MIT林肯实验室的SAR ATR 3级处理流程[3-7]Fig.1 SAR ATR three-stage processing flow of MIT Lincoln Laboratory[3-7]
早在20世纪80年代,林肯实验室就提出了分层模块化的SAR ATR的3级处理流程[3-7],该流程主要包括3个阶段:检测、鉴别和分类/识别。该3级流程思路清晰、结构合理,已成为SAR ATR系统广泛采用的一般流程[5]。林肯实验室的SAR ATR 3级处理流程如图1所示,第1级称为目标检测或者预先筛选,目的是从大场景SAR图像中提取出可能包含感兴趣目标的小块疑似区域,剔除明显不包含目标的区域,但是这个阶段会产生有大量的杂波虚警。第2级称为目标鉴别,其本质是一个二分类问题(区分目标类和杂波类),作为检测阶段的后处理步骤其目的是保留真实目标同时去除自然杂波虚警和部分人造杂波虚警,得到目标感兴趣区域(Region Of Interest,ROI)。第3阶段称为目标分类/识别,通过对ROI区域进行特征提取、特征选择、分类器设计等更加复杂的处理,进一步剔除人造目标虚警,最终得到目标的类别、型号等信息。目标检测与鉴别阶段用于得到ROI,这两个阶段得到的ROI的质量直接影响到识别阶段的任务复杂度,国内外针对这两个阶段已经有了大量的研究成果,目前大部分研究考虑的SAR图像场景较为简单,比如基于Radarsar-2数据(如图2所示)简单海面背景下的SAR目标检测与鉴别[8-11]、基于MSTAR数据(如图3所示)简单草地背景下的SAR目标检测与鉴别[12-14]等。一般来说,简单场景下的目标在空间上分布比较离散、杂波背景均匀且强度较低、人造杂波干扰较少,进行目标检测和鉴别相对容易。然而,在实际应用中,SAR ATR系统更多面临的是复杂场景,比如基于miniSAR数据(如图4所示)的复杂城区背景下民用车辆和基于GF-3数据(如图5所示)的复杂港口背景下的舰船目标检测与鉴别。复杂场景下存在杂波散射强度相对高、杂波背景非均匀和目标散射强度相对弱、分布密集等情况,进行高效精确的目标检测和鉴别较为困难。而且,不同于在全极化、干涉等条件下能够获取多通道SAR信息,单通道条件下SAR图像信息量非常有限,更增加了区分复杂杂波和感兴趣目标的难度。对于一些简单场景下的SAR目标检测及鉴别方法,已有文献进行了梳理和概括[15-18],感兴趣的读者可以参考文献[15-18]。本文集中对近十年来复杂场景下单通道SAR目标检测与鉴别的研究进展进行了归纳总结,并分析该技术领域存在的问题,指出其发展趋势。另外,需要说明的是,对于不同的应用场景,比如海面舰船目标检测和鉴别、城市复杂场景车辆目标检测和鉴别、机场飞机目标检测和鉴别等,面临的具体问题不同,方案设计思路和具体细节会有所不同,作为综述论文,本文关注于通用方法的归纳和分析。

图2 Radarsat-2数据集中图像的例子Fig.2 Example of image in Radarsat-2 dataset

图3 MSTAR数据集中图像的例子Fig.3 Example of image in MSTAR dataset

图4 miniSAR数据集中图像的例子Fig.4 Example of image in miniSAR dataset

图5 GF-3港口舰船目标数据集中图像的例子Fig.5 Example of image in GF-3 ship target dataset in the port area
本文内容安排如下。第2节介绍SAR目标检测方法,主要包括基于恒虚警率的目标检测方法、基于视觉注意模型的目标检测方法、基于复图像的目标检测方法。第3节介绍SAR目标鉴别方法,按照鉴别过程中所使用的监督信息的不同,分为基于全监督学习的鉴别算法和基于半监督、弱监督学习的鉴别算法两大类介绍。以上方法按照林肯实验室的SAR ATR 3级处理流程,检测、鉴别是独立的两个步骤。近年逐渐发展起来的基于深度学习的图像检测方法不同于SAR ATR 3级处理流程,作为一种端到端的处理方法,可以实现检测、鉴别、分类/识别3大步骤一体化。本文第4节介绍基于深度学习的目标检测和鉴别一体化方法。第5节针对现有复杂场景下单通道SAR目标检测和鉴别方法的不足,提出今后的研究发展趋势。第6节对全文归纳总结。
2 SAR目标检测方法
SAR图像目标检测的目的是从SAR图像中提取出潜在的目标区域,去除不可能包含目标的区域。自SAR图像目标检测的概念提出以来,国内外学者针对这个问题做出不懈的探索,取得了丰硕的成果。经过广泛的调研及梳理,根据目标检测算法设计思路的不同,将现有的复杂场景下SAR目标检测方法分为:(1)基于恒虚警率的目标检测方法;(2)基于视觉注意模型的目标检测方法;(3)基于复图像的目标检测方法。
2.1 基于恒虚警率的目标检测方法
恒虚警率(Constant False Alarm Rate,CFAR)是应用最广泛、最深入的SAR目标检测方法[19-42]。简单来说,CFAR算法就是通过滑窗方式逐一将图像中待检测像素点灰度值与某一自适应阈值比较来实现目标检测,其中阈值是在给定虚警率下对待检测像素周围杂波窗内的杂波进行统计建模而自适应确定的,通过阈值的自适应调节达到保持恒定虚警率的目的。
从以上对CFAR的描述可以看出,CFAR检测有两个要素:虚警率、杂波统计建模。虚警率是根据期望的虚警率人为预先设定的0~1之间的常量,其与具体的CFAR算法无关,而CFAR算法的目标就是尽量保证实际的虚警率与设定的虚警率一致。杂波统计建模通过杂波样本选取(即策略设计部分)、杂波模型选择(即选择哪种分布模型)、杂波参数估计3个步骤完成的。一般来说杂波模型选择好后,对应的参数估计方法也基本确定下来,比如基于高斯分布的双参数CFAR一般采用最大似然法估计参数,对于一些比较复杂杂波模型的参数估计方法可能会设计不同的参数估计方法,比如广义Gamma方法主要有最大似然估计法、矩估计法、对数累积量法等。对于一些基本的CFAR算法,文献[15]已经进行了详细的梳理和概括,本文下面主要对近十年CFAR相关的一些最新方法,从杂波样本选取方法的改进、杂波统计模型的改进以及结合其他信息的改进3方面进行归纳总结。
2.1.1 CFAR杂波样本选取方法的改进
通过合理选取CFAR杂波窗内用于杂波统计模型参数估计的样本(部分文献也称CFAR检测器),可以显著缓解SAR图像中存在均匀杂波、多目标、杂波边缘等复杂情形导致的虚警和漏警的问题。传统用于应对以上情形的杂波样本选取方法主要有单元平均CFAR(Cell Averaging CFAR,CA-CFAR)[27]、最小选择CFAR(Smallest Of CFAR,SO-CFAR)[29,30]、最大选择CFAR(Greatest Of CFAR,GO-CFAR)[29,30]、序贯统计CFAR(Order Statistics CFAR,OS-CFAR)[31]。其中,CA-CFAR针对的是均匀杂波情形,SOCFAR和OS-CFAR针对的是多目标情形,GOCFAR针对的是杂波边缘情形,这些杂波样本选取方法通常只在相对应的特殊杂波情形下有效。
针对多目标情形下的目标检测问题,Cui等人[43]于2011年提出了一种基于迭代筛选的CFAR目标检测方法,该方法通过迭代筛选检测的方式,在每次迭代中将上次得到的检测目标像素点从杂波样本中剔除,从而避免了多目标的干扰,其可以自适应的从杂波样本中筛选出潜在目标像素点,不像OS-CFAR那样需要利用先验知识确定像素点排序后的筛选深度。陈祥等人[44]于2012年提出一种基于CFAR级联的SAR图像舰船目标检测算法,在第1阶段的全局CFAR检测中采用较高的虚警率筛选潜在的目标,在第2阶段的局部CFAR检测中,以每个潜在目标的连通区域为检测单元确定杂波窗,以较低的虚警率确定潜在目标像素点,该算法可以在保证良好检测性能的同时具有较高的检测效率。为了同时解决多目标、杂波边缘的问题,宋文青等人[45]于2016年提出了一种自动区域筛选SAR目标检测算法,该算法分别利用变化指数统计量、均值比统计量对局部参考窗内的均匀区域进行筛选、对参考窗内同质的均匀区域进行区域合并,最后利用筛选到的同质均匀区域内的杂波样本集合进行背景杂波统计模型参数估计,该算法具有较稳定的检测性能和虚警抑制能力。
以上方法对筛选后剩余杂波采用未截断的统计模型进行参数估计实际上并不合适,可能会得到错误的检测结果,为此2016年Ding等人[46]提出了一种基于截断统计量的CFAR(Truncated Statistics CFAR,TS-CFAR)检测器,该检测器采用截断的方式来排除杂波窗内潜在的目标像素点,然后对杂波窗内剩余的杂波采用基于截断统计模型进行建模和参数估计,TS-CFAR在多目标情况下具有较高的杂波拟合精度、稳定的恒虚警保持能力、较高的检测精度。同样是针对多目标情形,Yu等人[20,47]提出一种基于超像素CFAR的SAR图像目标检测算法,该算法首先将大场景的SAR图像进行超像素分割,然后以每个超像素为检测单元,对超像素杂波窗上的超像素进行自适应筛选排除杂波样本内的目标超像素点,该方法在多目标情形具有较好的检测性能且检测结果更完整、连续。针对多尺度、多目标的舰船检测问题,2018年Ao等人[48]提出一种多尺度CFAR检测器,该检测器利用全局尺度、大尺度、小尺度CFAR对SAR图像依次进行目标像素点筛选,保留真实的杂波样本,不仅加快了CFAR检测速度而且可以有效检测多尺度目标,提高了多尺度、多目标舰船检测的精度。Leng等人[49]于2018年提出一种基于2-D Ostu分割方法的改进CFAR目标检测方法,该方法在杂波窗内利用Ostu算法自适应分割出潜在目标像素点和杂波像素点的基础上,根据提出的区域比不变的思想,对杂波统计模型的参数进行估计,该算法一定程度上解决了密集目标情况下其他目标对当前目标检测的性能影响。
从上述内容可以看出:第一,近几年提出的CFAR杂波样本选取方法以处理多目标情形为主,这可能是因为多目标情况下CFAR检测算法更容易产生漏警,而对于实际的SAR ATR系统来说相比于虚警,漏警是更加致命的。处理多目标情形的算法主要思路是尽量排除杂波窗内目标像素点的干扰。第二,像素级CFAR在逐渐向超像素级CFAR过渡,这是因为传统像素级CFAR的提出主要是针对低分辨率SAR图像,图像上感兴趣的目标可能只占几个分辨单元甚至1个分辨单元,而我们目前可以得到越来越多的高分辨率SAR图像,感兴趣目标通常呈现分布式目标状态,占据多个分辨单元,因此后续的杂波样本选取方法可以考虑超像素以及其他多元信息辅助CFAR来处理复杂杂波的情形。第三,单尺度CFAR难以适应舰船等多尺度、多目标的特点,设计多个尺度的CFAR检测器,逐级对目标像素点进行筛选,选取杂波样本,有利于密集目标和多尺度目标检测性能的提升。
2.1.2 CFAR杂波统计模型的改进
(1)参数化的杂波统计建模:针对一些相对简单的场景,杂波背景较均匀,参数化建模主要采用的模型有Gaussian分布、Rayleigh分布、Log-normal分布、Weibull分布、以及K分布模型等[15,20-28]。然而,针对场景中同时存在均匀杂波、多目标、杂波边缘等的非均匀杂波背景,以上模型大多会失效。
为了解决非均匀杂波背景下的目标检测问题,2009年Gao等人[50]提出了基于自动筛选的G0分布CFAR,该模型首先利用全局CFAR筛选出潜在目标像素点,然后采用局部CFAR对整个大图进行滑窗处理,其中对每个测试单元采用G0分布对排除潜在目标像素点干扰后的杂波进行统计建模,能够较好的拟合非均匀杂波。同年,胡睿等人[51]提出了基于稳定分布的CFAR,其中稳定分布是基于广义中心极限定理得到的,可以对强脉冲干扰现象准确地建模,对极不均匀区域的杂波都有较好的拟合能力。然而该方法检测阈值没有闭合解,需要利用数值迭代的方法求解。针对G0,稳定等分布参数估计耗时以及部分检测阈值没有闭合解的问题,2013年Qin等人[52]提出一种基于广义Gamma分布的高分辨率SAR图像目标检测方法。广义Gamma分布是一种具备能量、形状和尺寸3个参数的分布,在某些情况下可以退化为瑞利、指数、Gamma,Log-normal,Weibull等经典分布[52]。广义Gamma分布对高分辨SAR图像下的海杂波具有非常好的拟合能力。Qin利用对数累积量的方法估计广义Gamma分布的参数,并得到了对应检测阈值的闭合解,相比于基于K,G0等分布的CFAR具有更快的检测速度。
从参数化的杂波统计建模的发展过程来看,针对非均匀杂波所采用的统计分布模型越来越复杂,对应的参数估计和阈值求解也比较困难,但是即使采用复杂的统计模型,实际中对于复杂场景下适合于非均匀强杂波背景的统计分布模型的选择依然比较困难。
(2)非参数化的杂波统计建模:以上所述的各种参数化杂波统计模型在处理实测SAR图像时仍然可能难以对杂波进行精确拟合高。为了克服参数化建模的缺点,Gao[53]于2011年提出了一种基于Parzen窗核密度估计的SAR舰船目标检测方法,该方法采用基于Parzen窗核密度估计的方法对整幅图像进行非参数化的建模。该算法假定目标在场景中是稀疏的,用整幅图像的像素点来估计杂波概率密度函数,这可能导致检测阈值变大而造成漏警。为了解决这个问题,张颢等人[54]于2015年提出了一种改进的基于Parzen窗的算法,该算法首先利用简单的分割方法得到潜在的目标像素,然后利用Parzen窗核密度估计对消除潜在目标像素影响后的SAR图像来估计杂波概率密度函数。
2.1.3 结合其他信息的改进
以上所述的CFAR是从杂波样本选取、杂波统计模型两个方面进行改进,都是基于SAR图像的强度信息并且没有使用其他信息,而在高分辨率SAR图像中除强度信息以外还有很多其他信息可以利用,并且还可以借助监督学习的方式来提升检测精度。
针对传统CFAR单纯利用强度信息导致检测精度不高的问题,Leng等人[55]提出一种双边CFAR,双边CFAR不仅考虑了SAR图像中目标的强度信息而且考虑到了目标的空间信息,即舰船目标的高强度像素点通常比较连续且集中在一个小的区域,而杂波背景像素点通常比较离散且分布不一定集中。针对高分辨SAR图像民用车辆目标检测虚警较多的问题,Huang等人[56]提出一种语义CFAR目标检测算法,在这里的语义信息是指语义CFAR算法不仅使用了车辆目标的强度信息而且使用了车辆目标的阴影信息,相比于单纯利用强度信息的传统CFAR可以去除了大量不存在阴影的强杂波虚警。为了解决CFAR对于多尺度舰船目标的检测问题,结合监督学习,Dai等人[8]于2016年提出一种基于目标候选区域的CFAR目标检测方法,该方法首先利用监督学习的方法训练目标候选区域生成器,然后利用生成器生成一定数量不同尺度的目标候选区域,再对各个目标候选区域进行杂波窗长自适应的CFAR检测,克服了传统CFAR杂波窗长固定的缺点。针对复杂场景下基于监督学习的目标检测方法样本获取可能比较困难的问题,2017年曾丽娜等人[57]提出了一种基于单样本有效特征的SAR目标检测方法,该方法只需要一个感兴趣目标的样本来产生监督信息,通过全局CFAR检测、目标样本面积特征匹配等预处理步骤剔除绝大多数背景杂波,进一步通过纹理PSURF特征对潜在目标中的兴趣目标与非目标进行分离,获取最终检测结果。2017年Kang等人[58]将CFAR与深度神经网络结合,提出一种Faster-RCNN结合CFAR的舰船目标检测算法,该算法对Faster-RCNN得到的置信度较低的切片利用CFAR进行检测,对尺寸较小的舰船目标具有较好的检测能力,但是需要较多的训练数据。
由上述内容可以看出,复杂场景下单纯利用强度信息的CFAR算法精度较低,而将CFAR与其他信息或者监督信息相结合可以显著提升SAR目标检测的精度,这也是未来改进传统CFAR算法的一个重要的方向。
2.2 基于视觉注意模型的目标检测方法
2.1 节所述的基于CFAR的SAR目标检测主要对杂波进行统计建模,很少考虑目标的特性。然而高分辨率SAR图像作为一种2维图像信号,感兴趣的目标通常占据多个分辨单元,含有丰富的空间和结构视觉信息,可用来设计目标检测算法。人类视觉注意机制是一种选择性注意机制,只关注场景中那些显著、突出的物体,而忽略场景中其它的物体。经过这种机制选取的视觉信号被送往大脑的高级皮层,进行比如目标检测、目标识别和学习等更复杂的处理,因此可以大大加快大脑进行视觉信息处理的速度。图6给出了几幅光学图像及对其进行显著性检测的结果[59],图中第1列是原始图像,第2列是利用显著性检测算法得到的显著图,第3列是根据显著图提取的光学图像中显著区域。由图6可以看出,在利用显著性检测算法得到的显著图上比较亮的区域对应是原始光学图像上显著(前景)区域,进而基于显著图提取的区域也就是原始图像中的前景区域。受人类的视觉注意机制的启发,人们提出了大量的基于视觉注意模型的算法用于模拟人类的选择性视觉注意机制,对光学图像构建显著图并提取光学图像中显著的区域,这些算法被称为显著性检测算法。Itti等人[60,61]在1998年首次提出了一种生物学启发的视觉注意模型,该模型利用强度、颜色、方向这3种特征图进行中心-周边差处理得到图像的显著图,实现显著性检测。后续大量的显著性检测算法相继被提出[61-67]。然而,光学图像和SAR图像由于成像机理的不同,它们之间存在较大的差异,而光学显著性检测和SAR目标检测也存在一些区别,因此传统的光学图像显著性检测方法不能直接应用到SAR图像目标检测中。
近年来,研究者们提出了一些适合于SAR图像的显著性检测方法。图7给出了某幅小场景SAR图像及其对应的显著图[68],其中,图7(a)中红色矩形内的是建筑物强杂波,绿色矩形框内的是感兴趣的车辆目标,图7(b)中对应的目标被增强,强杂波被有效抑制。目前基于视觉注意模型的SAR目标检测方法可以分为数据驱动方法和任务驱动方法[69]。
2.2.1 数据驱动方法

图6 光学图像及其显著性检测的结果[59]Fig.6 Optical image and its visual attention mechanism processing results[59]

图7 某幅小场景SAR图像及其显著图[68]Fig.7 SAR image with small scene and its saliency map[68]
数据驱动的方法仅考虑了图像本身的特性,没有任何先验知识。Yu等人[70]于2011年最先开展了SAR图像显著性目标检测的研究,将自然图像中的频域显著性模型应用于SAR舰船检测中,证实了显著性算法在SAR图像目标检测中的可行性,虽然该方法仅应用在简单场景中,但开启了SAR图像显著性目标检测的先河。之后,Liu等人[71]对经典的Itti模型进行改进以保证对SAR图像中弱目标的检测能力,提出了一种基于奇异值分解的SAR目标检测方法,然而由于奇异值分解计算较慢,使得该算法在大场景SAR图像中的应用受限。Zhao等人[72]利用基于脉冲余弦变换的显著性方法进行SAR目标检测。Wang等人[73]于2016年提出了模式重现(Pattern Recurrence,PR)显著性检测器,该检测器使用了图像块而不是单个像素点的强度对比度来凸显目标同时抑制相干斑噪声。Ni等人[74]于2018年提出一种基于背景上下文信息的SAR图像目标显著性检测方法,作者首先基于SAR图像块的统计均值自适应选择了一些背景图像块,然后利用这些背景图像块与当前的图像块计算非相似度构造显著图,并在一些小场景SAR图像上进行了实验验证。上面提到的几种方法都是纯数据驱动的,在简单场景下有效,然而在复杂场景下它们很难获得较好的检测性能。
2.2.2 任务驱动方法
任务驱动方法除了考虑图像本身的特性外还考虑了一些关于待检测目标的先验知识,比如Hou等人[75]基于视觉注意模型并结合舰船目标通常在水域而不是在陆地上这一先验知识提出了一种舰船目标检测方法来提高舰船目标的检测性能。Wang等人[69,76]利用待检测车辆目标的尺寸先验信息,从原始SAR图像的强度高斯金字塔中选取任务相关的尺度用于构建显著图,在凸显目标的同时压制背景杂波,有效地提高了目标检测的精度和速度。为了进一步去除非均匀背景下强杂波虚警,Wang等人[68,69]提出了一种基于贝叶斯-形态学显著性的SAR目标检测方法,该方法主要包括贝叶斯显著图构建和形态学显著图构建。其中,贝叶斯显著图可以获得感兴趣的目标以及一些强杂波的完整结构,有利于后续目标先验信息的充分利用;形态学显著图通过结合目标尺寸和形状先验信息凸显感兴趣目标的同时压制自然杂波和人造强杂波。针对复杂的港口区域舰船目标检测的问题,Zhai等人[77]提出一种基于上下文信息显著性的舰船目标检测方法,该方法首先对SAR图像分割为超像素,然后计算该超像素的局部和全局显著度,最后利用舰船目标周围是水域、地面杂波周围是陆地的上下文先验信息去除部分杂波虚警。上面的方法主要从目标特性分析的角度进行显著性目标检测,然而有些情况下目标先验知识较少,而已知的杂波信息较多,Li等人[78]利用纯杂波图像中的杂波信息提出了一种基于双域稀疏重构显著性的SAR目标检测方法,利用纯杂波图像块和稀疏重构算法在图像域和特征域分别构建显著图,并将这两种显著图进行融合,不仅提高了显著性检测的精度还由于图像块的使用增强了对斑点噪声的抑制能力。
需要注意的是,一般来说在显著图上确定精确完整的目标轮廓较为困难,而且上述目标检测方法在获得显著图之后需要人为设定阈值来获得检测结果,检测结果有时并不尽如人意,因此,一些学者利用显著性检测方法先确定目标的大致区域,在这个区域内进一步处理得到精确的检测结果。如Tu等人[79]利用显著性检测方法找到显著的目标区域,然后利用活动轮廓模型对显著目标区域进行精细分割以精确定位目标的边界,但是该方法在复杂场景下很难得到目标的精确轮廓。
2.3 基于复图像的目标检测方法
以上讨论的检测方法仅利用了实数域SAR图像,主要考虑的是目标与杂波在图像幅度上的差异,然而,SAR图像形成的物理本质是电磁波与场景或目标相互作用之后的电磁矢量的相干叠加,其本身是一种带有相位信息的复数数据。复数SAR图像数据中包含了丰富的地物和目标电磁散射信息,例如几何形状、材质、结构等,从这个意义上讲基于复图像特征的目标检测算法是更为广义上的SAR图像目标检测算法。因此,理论上,可以通过对2维SAR回波特性和成像机理进行深入的研究,发展更为精确的目标检测算法。目前基于复图像的目标检测算法可以分为子视图相干法以及复数域统计建模的方法。
2.3.1 子视图相干法
子视图定义为仅使用全部可用系统带宽的一部分形成的图像称为子视图像[80]。子视图的分辨率会随子视图个数的增加而成比例降低。子视图可以沿着距离维或方位维对单视复数SAR数据进行子视处理得到,即得到距离维子视图或方位维子视图。图8给出了子视图提取流程图。如图8所示,对原始SAR图像沿着某1维做FFT,得到该维度的频谱数据,然后在去除成像时加窗处理的影响后,对频谱数据进行有重叠或者无重叠的划分,得到多个子频谱,然后分别对这些子频谱进行IFFT变换到图像域,最终得到多幅子视图[80]。为了平衡距离维分辨率(通常较低)和方位维分辨率(通常较高),目前子视图相干目标检测方法多沿着方位维进行子视图提取[11]。沿着方位维提取的子视图也称为子孔径图像,子视图相干法也称为子孔径相干法。
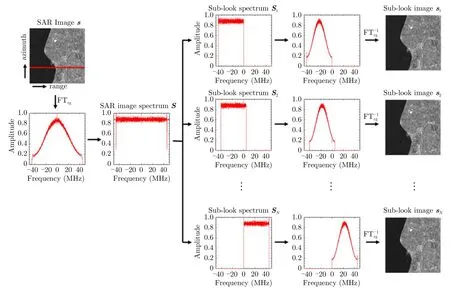
图8 子视图提取流程图[80]Fig.8 Flow chart of sub-look image extraction[80]
子视图相干法的本质是,目标在合成孔径时间内不变,环境(如海杂波等)的相干时间低于合成孔径时间,子孔径相干之后目标区域的相干度高于环境区域,进而能进行目标的检测。子视图相干方法目前主要应用于海面舰船目标检测,其优点是不需要舰船目标具有很强的散射回波,而只需要子孔径图像间的回波相干性较强,因此散射回波强度较弱的目标也有可能被检测到,可以克服CFAR依赖于目标与杂波高对比度的缺点。1999年Arnaud[81]利用两幅子孔径图像进行干涉相干(归一化的复数相干处理)进行舰船目标检测。Souyris等人[10]于2003年指出干涉相干法由于归一化处理导致幅度信息丢失,检测性能较差,因此提出利用两幅子孔径像进行非归一化的复数相干处理即厄米特内积(Internal Hermitian Product,IHP)进行舰船目标检测。2004年Ouchi等人[11]尝试将IHP应用于Radarsat-1数据舰船目标检测上,发现2幅子孔径图像的复数相干结果仍然难以区分舰船目标和海杂波,因此提出利用2个子孔径SAR图像的幅度/强度而不是复数数据进行相干,得到多视交叉相关图像,同时作者指出传统复数相干结果较差的原因可能是成像期间的舰船运动造成的相位变化。为了提高利用子孔径图像复数相干方法舰船目标检测的能力,2012年Wang等人[9]通过联合利用多个子孔径间的复相干性以及各子孔径图像的强度信息完成检测,应用于海面舰船目标检测。实验显示当子视图像数量增加时,目标与杂波对比度有所提高。但是由于子视数目的增多图像分辨率越来越低,因此需要平衡对比度和分辨率来选择合适的子孔径数目。
2.3.2 复数域统计建模的方法
以上子视图相干法主要从子视图之间的目标相干性进行舰船目标检测。文献[82]指出子视图相干法作为一种谱分析的方法,仅仅可以作为CFAR检测器的一种补充手段,存在舰船和杂波的对比度仍然不够高的问题。为了充分利用复数数据,一些研究者对复数域SAR图像进行统计建模和数据分析。在传统的单通道低分辨SAR图像处理理论中,把目标当作点目标进行处理,且认为复数SAR数据的相位是随机的且服从均匀分布,相位信息无用,因此仅利用实数域数据进行SAR图像处理和目标检测、识别。El-Darymli等人[83]认为高分辨率SAR图像中目标作为一种扩展目标,复数数据中的相位信息非常重要,因此Khalid等人利用复数SAR数据对高分辨率SAR图像进行复数域统计建模。紧接着,El-Darymli等人[84]又提出一种基于相位信息特征化的建模方法。Leng等人[85]针对描述复数SAR图像的复数广义高斯分布的形状参数估计耗时、不够精确的问题,提出一种新的快速形状参数估计方法。以上方法主要是对复数SAR图像进行统计建模和数据分析的研究并没有利用复数数据进行目标检测,因此Leng等人[82,86]将复数SAR图像统计建模应用到了舰船目标检测中,利用复数信号的峰度进行舰船检测,由于复数信息的合理利用大大减少了射频干扰、方位模糊等引起的虚警。
由上述内容可以看出,目前SAR图像复数据主要应用在海洋背景下的舰船目标检测方面。基于复数SAR图像的目标检测方法虽然从物理机理出发,但是在具有多种人造目标干扰的地面背景下的目标检测方面进展相对缓慢。2017年Zhang等人[87]提出一种基于复数神经网络的极化SAR图像分类方法,对传统实数的卷积神经网络进行复数化改造,最终在极化SAR图像分类应用中取得了不错的效果。期望后续能够借鉴复数神经网络的思路设计单极化复数SAR图像的目标检测方法,充分利用SAR图像复数据自动学习SAR图像目标与杂波的可分性散射特征。
为便于不同SAR目标检测方法的比较,表1列出了以上所述3类SAR目标检测方法的优点和缺点。
3 SAR目标鉴别方法
SAR图像目标鉴别作为SAR目标检测的后处理步骤,其主要任务是在保留目标区域的同时,尽可能地剔除大量杂波虚警,进而降低后续目标分类/识别的计算负担。目标鉴别的思想始于上世纪80年代,与SAR图像目标检测的研究一样也是林肯实验室最先开始进行的,经过若干年的发展,已经成为SAR应用领域一个重要的分支,在理论和应用上均取得了大量的研究成果。高贵[16]于2009年从起源、发展、算法流派等角度对SAR目标鉴别算法进行了详细的梳理与总结,2009年之前的鉴别算法限于篇幅限制本文不再过多赘述。
下面本文对近几年的SAR目标鉴别算法按照鉴别过程中所使用的监督信息的不同,对鉴别算法分为以下两大类:(1)基于全监督学习的鉴别算法;(2)基于半监督、弱监督学习的鉴别算法。
3.1 基于全监督学习的鉴别算法
在全监督学习中,特征提取是全监督学习首先需要解决的问题,提取能反映各个类别差异的可分性特征对于整个监督学习算法来说至关重要。对于SAR图像目标鉴别来说,特征的可分性好坏对其性能的影响最大,可分性好的特征即使用简单的特征选择以及鉴别器就可以获得好的鉴别性能,而可分性差的特征即使经过后续复杂的特征选择和鉴别器也很难提高鉴别性能。因此,目前关于基于特征的SAR目标鉴别算法的研究更多集中在鉴别特征提取上。
1989年,林肯实验室Burl等人[88]开创性提出了标准差、分形维和排列能量比3个纹理特征,在SAR目标鉴别实验中获得成功,开启了鉴别特征提取的研究先河。后经林肯实验室的几位学者以及ERIM等机构的再塑造,逐渐形成了较全面反映目标和杂波虚警差异、应用广泛的鉴别特征家族,高贵[5,16]对这些特征进行了详细了分析和比较。2013年Park等人[13]提出了一种基于目标区域多角度投影的鉴别特征,其对疑似目标切片分割后的目标区域在0°~180°方向上进行投影,可以反映目标的长度、宽度、长宽比等信息,在一定程度上区分目标和自然杂波。
早期提出的各种鉴别特征多数是离散的、独立的特征,每个特征有其独特的物理意义,如林肯特征和Bhanu特征,这些特征可以从不同的角度反映目标和杂波的特性与差异,它们在一定程度上可以区分目标和杂波。然而,在实际应用中,大量的特征可能会造成特征冗余,影响鉴别性能,因此,这些鉴别特征输入到鉴别器之前通常需要进行特征选择,选择出最适合于当前SAR目标鉴别任务的特征子集进行鉴别。近十年来提出的SAR目标鉴别特征选择算法可以归纳为搜索法、特征排序法、特征选择与分类器相结合的方法这3类。(1)搜索法的思路是根据某种准则不断地对最优特征子集进行搜索,代表性方法有遗传(Genetic Algorithm,GA)算法、序列浮动前向选择(Sequential Floating Forward Selection,SFFS)算法、粒子群优化(Particle Swarm Optimization,PSO)算法、秩搜索(Rank Search,RS)算法等。传统基于GA算法的鉴别特征选择中适应度函数只考虑了特征选择个数和总错误个数两项,而在实际应用中,通常要求目标尽量不发生漏警,而允许杂波虚警存在误判,因此,Gao[89]于2011年设计了新的适应度函数,该适应度函数同时考虑了特征子集个数、总错误个数、漏警个数3项的影响,保证在一定的总鉴别正确率下,漏警个数将尽可能低。刘轩等人[90]认为文献[89]提出的改进的适应度函数中特征选择个数这一项所占的比重较高,通过在该项中除以总特征数大幅减小了所选特征数对适应度函数值的影响,保证了优选特征序列的鉴别性能,加快了遗传算法的收敛速度。为了提升传统SFFS的性能,李礼[91]对传统SFFS算法中剔除特征子集的准则进行了改进。相比于原始SFFS算法,改进后的SFFS算法提高了运算速度,降低了计算复杂度,提升了鉴别的总正确率。SFFS算法虽然计算效率高,但是不能保证结果是全局最优解。2014年,Amoon等人[92]提出一种基于PSO算法的SAR鉴别特征选择算法。实测数据的结果表明,相比于GA算法,基于PSO的特征选择算法用于SAR目标鉴别的性能较高,但是也存在易产生局部最优解的问题。针对GA算法等特征选择算法对参数敏感的问题,Park等人[13]于2013年提出RS算法并应用于SAR目标鉴别。该算法从原始特征中搜索出与训练样本协方差矩阵秩数相等的特征子集作为特征选择的结果,特征子集之间线性独立,没有特征冗余,且不需要提前设定参数。(2)特征排序法以某种准则衡量单个特征的可分性,并对特征进行排序,选出前几个可分性较强的特征作为最优特征组合。国防科技大学陈琪等人[93]利用各个鉴别特征的类内类间比大小对特征的线性可分性进行度量,得到优选特征。该方法较简单,不需要进行穷举搜索问题,但是没有考虑特征之间的耦合性。(3)特征选择与分类器相结合的方法是将特征选择融合到某一个分类框架中,通过求解优化问题同时实现特征选择和分类判决。西安电子科技大学王斐[94]提出一种结合稀疏特征选择的降维判决方法并应用于SAR目标鉴别。该方法在Fisher线性判决分析的回归模型中,对投影判决矩阵添加稀疏约束,通过求解优化问题得到部分行为零的投影判决矩阵,利用该投影判决矩阵对数据进行投影变换,得到由特征选择后的原始特征线性组合的低维投影特征,最后采用最近中心法进行线性判决,同时实现特征选择和分类判决。

表1 不同SAR目标检测方法比较Tab.1 Comparison of different SAR target detection methods
最近针对复杂场景目标鉴别提出的特征大多都是一个相互关联的整体,彼此依赖,利用特征选择算法对特征进行选择的效果并不理想,需要更有效的特征学习方法。传统鉴别特征仅提供了关于目标和杂波大致、部分的描述,且一些特征是在对疑似目标区域进行分割的基础上提取的,因此在一些简单的场景下效果非常好,然而在复杂背景杂波且存在多目标、部分目标的场景下性能较差,为此,研究者们提出了众多适合于复杂场景下目标鉴别的新特征。2018年Wang等人[76]基于光学遥感领域中的显著性和全局性特征,结合SAR图像的特性,提出了适合于SAR目标鉴别的改进的显著性和全局性特征,对疑似目标切片进行局部以及全局的综合描述,有效区分了目标和部分复杂杂波。为了解决低层特征语义信息较弱的问题,Du等人[95]结合SARSIFT和局部线性限制编码,提出了中层特征,中层特征相比低层特征具有较丰富的语义信息,可以较好的区分目标和大部分杂波。针对复杂场景下切片级鉴别的弊端,结合广泛应用于光学图像的词袋模型,Wang等人[96]提出了多域多级的超像素级特征描述符,该方法采用超像素作为基本的鉴别单元,对超像素从纹理域、多尺度幅度域以及子孔径散射域进行全面的描述,以保证特征描述符鉴别目标与复杂杂波的能力。Wang等人[97]提出了一种基于卷积神经网络的SAR目标鉴别方法,作者对检测阶段得到的潜在目标切片提取强度特征图和边缘特征图,分别作为两个卷积神经网络的输入,然后在高层对两个网络的特征进行特征级融合,自动提取出了区分目标和杂波的鉴别特征。
3.2 基于半监督、弱监督学习的鉴别算法
在上述基于特征的目标鉴别方法中,需要对检测得到的疑似目标切片进行标记以训练分类器,通常需人工标记大量的样本以保证分类器的性能,然而在实际应用中,标记大量的SAR样本耗时耗力。在复杂场景下,由于遮挡、目标聚集、目标散射强度较弱等原因,使得对疑似目标的标记更为困难,为此,有学者提出了半监督、弱监督的SAR目标鉴别方法,在减少人工标记样本负担的同时保证鉴别的精度。其中,半监督学习就是少部分训练数据的标记已知,大部分训练数据的标记未知,训练一个智能算法,同时利用已知标记和未知标记的数据进行学习,将输入数据映射到标记的过程;弱监督学习就是已知数据和其对应的弱标记,训练一个智能算法,将输入数据映射到一组更强的标记的过程。标记的强弱指的是其蕴含的信息量的多少,比如相对于在图像中进行目标检测任务的目标级标记来说,图像级类别的标记就是弱标记。
Wang等人[98]在对传统林肯实验室提出的鉴别特征进行分析的基础上,提出了基于协同训练的半监督目标鉴别方法,此方法只需要对少量的疑似目标切片进行标记,大大减少了人工标记的负担。为了进一步提高鉴别性能,2019年Du等人[99]提出了基于半监督无限隐狄利克雷模型的SAR目标鉴别方法,将特征学习和分类器学习统一在同一贝叶斯框架下,在少量标记样本的条件下即可获得较好的鉴别性能。同年,为了进一步减少鉴别模型对标记样本的需求,Du等人[95]提出了一种基于弱监督学习的鉴别方法,仅利用图像级标记(图像中是否含有目标)即可对检测得到的疑似目标切片进行鉴别,获得了与全监督方法相当的鉴别性能,极大地减少了人工标记的负担。
为便于不同SAR目标鉴别方法的比较,表2列出了以上所述两类SAR目标鉴别方法的优点和缺点。
4 基于深度学习的目标检测和鉴别一体化方法
目前深度学习作为一种同时进行特征学习和分类器设计的技术在光学图像目标检测、分类等任务中取得了令人瞩目的成就,引起了广泛的关注。不同于SAR ATR 3级处理流程,作为一种端到端的处理方法,深度学习可以实现检测、鉴别、分类/识别3大步骤一体化。在3级处理流程中,检测过程是将图像中不可能包含目标的区域去除,生成疑似目标区域,鉴别过程中是进一步对疑似目标区域进行鉴别,分类/识别过程是对目标区域类别的进一步划分。检测阶段更偏重效率,鉴别和分类/识别阶段更注重准确。基于深度学习的一体化方法是将检测、鉴别和分类/识别3个步骤通过深度网络完成,将传统的3阶段较好地统一到同一个框架中。由于检测、鉴别都属于目标和杂波二分类问题,SAR目标检测和鉴别一体化深层网络大都简称为SAR目标检测网络,但事实上该类方法同时也完成了目标和杂波的鉴别任务。
然而,深度学习需要大量有标记训练样本的支撑,例如光学数据集中的公开的手写体字符MNIST[100]数据集有60000张图像,公开的CIFAR-10[101]数据集有50000张图像,公开的ImageNet[102]数据集中有1400万张图像。然而,公开的SAR图像数据较少,尤其是有标记的SAR图像更少。常用的目标检测数据集MiniSAR只有9幅包含有民用车辆目标的SAR图像可用,而且未给出标记样本,图像中的目标数据需要使用者人工标记,给基于深度学习的SAR图像目标检测和鉴别带来了巨大的挑战。
在分析SAR图像固有特性和深度学习技术的特点的基础上,有部分学者将深度学习方法应用到SAR图像目标检测中。研究者们通过数据扩充、迁移学习、参数缩减等角度[12,103-105]来保证深度网络学习的收敛性,进而保证网络的检测精度。下面将对深度学习技术应用于SAR图像海面舰船目标检测和地面车辆目标检测的情况分别进行阐述。
海面舰船目标检测方面,针对传统带有全连接层的卷积神经网络参数过多而需要大量训练数据的问题,2017年Cozzolino等人[106]提出一种基于全卷积神经网络的舰船目标检测方法,该方法采用密滑窗的方式得到大量图像块,然后将这些图像快输入全卷积神经网络对其进行目标与杂波的二分类,最终实现了舰船目标检测。针对SAR图像数据缺乏公开标注数据集而导致深度学习技术的应用困难的问题,海军航空大学李健伟等人[107]于2018年构建了一个全球首个公开的SAR图像舰船目标检测数据集SSDD,SSDD包含不同分辨率、尺寸、海况、传感器类型等条件下的舰船SAR图像,一共有2456个舰船目标,作者结合迁移学习改进了的Faster-RCNN并在SSDD数据集上展示了不错的效果。同年,基于SSDD数据集,Jiao等人[108]针对多尺度和多场景SAR图像舰船检测难题,改进了Faster-RCNN提出了一种端到端的检测网络。针对港口背景下的舰船目标检测虚警较多的问题,Liu等人[109]提出一种基于深度神经网络的港口区域舰船目标检测方法,该方法构建了多尺度的全卷积神经网络来融合局部和全局上下文信息,并采用旋转目标框对港口区域的目标进行精确定位,显著提高了港口复杂背景下的舰船目标检测的精度。2019年李健伟等人[110]在现有SSDD数据集的基础上,针对目前检测算法对数据集利用不充分的问题,提出一种基于生成对抗网络(Generative Adversarial Networks,GAN)数据扩充技术和线上难例挖掘(Online Hard Example Mining,OHEM)的SAR图像舰船目标检测的算法。中国科学院空天信息创新研究院孙显等人[111]提出高分辨率SAR舰船检测数据集AIR-SARShip-1.0,该数据集包含31景高分三号SAR图像,场景类型包含港口、岛礁、不同级别海况的海面等,背景涵盖近岸和远海等多样场景,数据量比SSDD数据集大,更适合深度学习技术在SAR目标检测中的应用。同时,作者使用经典舰船检测算法和深度学习算法进行了实验,指出基于密集连接端到端的网络方法效果最佳。针对Faster R-CNN网络仅仅利用单一尺度的特征图提取目标候选区域的不足,2019年Zhao等人[112]基于Faster R-CNN提出了Coupled CNN目标检测网络,其特点是利用多尺度的特征图提取目标候选区域,在目标尺寸多样的海面目标检测中取得了较好的效果。针对大场景图像目标快速检测的问题,2019年陈慧元等人[113]提出了一种基于级联卷积神经网络的大场景遥感图像舰船目标快速检测方法,该方法首先使用一个轻量级的目标预筛选全卷积网络,对大场景中可能的目标进行预筛选,然后使用目标精确检测全卷积网络对目标进行精确定位,该方法可以显著提高目标检测的效率,可实现大场景遥感图像目标快速检测。

表2 SAR目标鉴别方法总结Tab.2 Summary of SAR target discrimination methods
地面车辆目标检测方面,针对SAR数据较少容易产生过拟合的问题,2016年杜兰等人[103]结合迁移学习和数据扩充技术提出了一种基于卷积神经网络的SAR目标检测方法,该方法先用已有的完备数据集训练得到卷积神经网络分类模型,用得到的模型对基于Faster R-CNN的检测网络进行参数迁移,再利用完备数据集对训练数据做扩充对网络进行学习,在具有复杂场景的miniSAR数据上可以获得比传统CFAR更好的检测性能。miniSAR数据集是2006年美国Sandia国家实验室公开的一个以复杂城区场景为主的实测数据集,共有20幅SAR图像,图像尺寸为1638×2510,图像分辨率为0.1 m×0.1 m。miniSAR图像场景中包含民用车辆、建筑物、道路、直升机、草地和树木等,在检测、鉴别应用中通常将民用车辆作为感兴趣目标。Chen等人[12]对深度网络的参数进行缩减,提出了一种基于全卷积神经网络的SAR图像目标检测方法,该方法采用滑窗的方式提取候选目标切片,然后对传统卷积神经网络去除全连接层,得到全卷积网络对候选目标切片进行二分类处理,最终区分出目标和杂波,文中作者只对合成的简单场景下的MSTAR大图进行了实验,缺少对复杂场景的验证。为了进一步提高复杂场景下SAR目标检测的性能,2019年Wang等人[104]提出了一种基于SSD模型的SAR图像目标检测方法,该方法结合SAR图像的特性设计了面向SAR图像的数据扩充和迁移学习方法,在具有复杂场景的miniSAR数据上获得比基于Faster R-CNN检测网络更好的检测性能。现今,数据扩充、迁移学习、参数缩减等方式已经成为基于深度学习的目标检测方法必需的处理手段。在此基础上,为了进一步抑制背景杂波提高SAR目标检测性能,2019年Du等人[114]提出了一种显著性引导的SSD目标检测方法,利用图像的显著性信息,引导深度卷积神经网络关注目标区域抑制背景杂波,提高特征表征能力,从而获得更好的目标检测性能。
以上深层网络检测方法均使用的是全监督学习,需要对所有训练SAR图像进行切片级标记,人工标记十分耗时费力。为了减少人工标记的负担,降低网络对标记数据的依赖程度,2020年杜兰等人[115]提出了一种基于半监督学习的SAR目标检测网络,该方法首先使用少量切片级标记的SAR图像训练目标检测网络,然后使用图像级标记的SAR图像输入网络,对检测结果中的切片进行挑选,并加入候选切片集,最后使用更新后的候选切片集对检测网络再次训练,挑选切片和训练检测网络多次迭代直至收敛,该方法对切片级标记的SAR图像需求量少,与全部训练样本都进行切片级标记的全监督方法的性能相差不大,大大降低了人工标记的工作量。
根据现有公开文献看,目前具有标注信息公开的车辆目标检测SAR图像数据集暂时缺乏,部分研究者采用MSTAR数据嵌入到杂波背景中或者miniSAR图像人工标注的方式构建地面车辆目标检测数据集。实际上复杂地面背景下民用车辆散射强度较弱且分布密集,与周围的建筑物等杂波背景区分度较差,人工标注过程中会存在很多无法确定是否为车辆目标的情况,因此不可避免的会存在一些错误标注的情况,为深度神经网络的训练增加了难度。期望在后续研究过程中,研究者们可以齐心协力一起构建具有标注信息的复杂地面背景下车辆目标检测公开数据集,推动SAR图像地面背景下车辆等感兴趣目标检测技术的发展。
表3对SAR目标检测、鉴别2级流程与检测、鉴别一体化方法进行了比较。在实际应用中,检测、鉴别方法的时效性是非常重要的,表3也指出了一些传统方法在时效性上的优势。需要说明的是,对于运算效率,理论研究时,目前的深度学习方法大都在计算性能更强的GPU上进行运算,传统方法一般在CPU上进行运算,深度学习由于GPU运算的加持,其测试时间一般会比传统方法少;但是在实际的工程应用中,由于功耗限制,运算平台的计算性能相对不高,在这种情况下,比较简单的CFAR模型、显著性方法大部分速度都比较快,子视图相干法速度也较快,但相对于这些传统方法,深度学习方法的测试时间会比较长,效率不高。不过,计算量对于具体的方法要具体衡量,尤其是对步骤复杂的传统方法而言,要根据具体步骤具体计算,并不能一概而言。

表3 SAR目标检测、鉴别2级流程与基于深度学习的检测、鉴别一体化方法比较Tab.3 Comparison of SAR target detection and discrimination based on two stage process with detection and discrimination integration method based on deep learning
5 发展趋势
针对现有复杂场景下单通道SAR目标检测和鉴别方法的不足,今后的研究工作可以考虑以下5个问题:
(1)自适应确定杂波类型和杂波样本的研究:对于复杂场景SAR图像,在整个场景中存在多种类型的杂波区域,而不同区域的杂波统计特性变化较大,因此需要自适应地确定杂波类型,进而选择合适的统计模型;同时需要自适应的选择CFAR杂波窗内的杂波样本,避免多目标区域、杂波边缘等问题带来的虚警以及漏警问题。自适应确定杂波类型和杂波样本对于提高基于CFAR的目标检测方法的检测性能具有重要意义。
(2)SAR图像特性在深度网络中的嵌入:现有的基于深度学习的检测和鉴别方法所用网络绝大多数是从光学图像继承过来的,如何将SAR图像独有的特性嵌入到深度学习中,比如单通道SAR图像的复信息对于复杂环境下检测性能提升很重要,设计针对SAR图像的深度网络具有重要意义。
(3)基于半监督、弱监督学习的鉴别方法的深入研究:由于半监督、弱监督方法仅需少量的监督信息即可学习,在实际应用中具有重大的发展潜力,研究有效的、具有实际应用型的基于半监督、弱监督的鉴别方法具有重大意义。
(4)场景上下文等多信息的综合利用:在复杂背景下,仅利用目标或者杂波的幅度信息,难以有效的检测目标。已有改进的CFAR、显著性等方法通过综合利用目标和杂波的尺寸、形状以及复数据等信息有效提高了目标检测、鉴别精度。但是,场景上下文信息在SAR图像检测、鉴别中的研究还不充分,如何综合利用场景上下文和幅度、尺寸、形状、纹理、复数据等多种信息对于算法精度的提升具有重要意义。
(5)快速算法的研究:在实际应用中,往往面临大场景SAR图像数据,对静止时敏目标的检测、鉴别对于时效性要求很高。目前的深度学习算法在计算资源(GPU、存储等)充足的理想情况下运算速度具有优势,但却无法应用于片上处理或者星上处理。类似的,一些改进的CFAR、显著性方法越复杂运算也越慢。因此,提升这些高性能算法的运算效率对于SAR ATR系统的实用化具有重要意义。
6 结束语
本文对近十年复杂场景下单通道SAR图像目标检测与鉴别的主要算法脉络进行了梳理,分析了这些算法的优缺点,并对未来复杂场景下单通道SAR图像目标检测与鉴别技术的发展进行展望。由于在复杂场景下SAR图像存在杂波散射强度相对高、杂波背景非均匀和目标散射强度相对弱、分布密集等情况,使得传统的SAR图像目标检测与鉴别技术无法满足实际需求,期冀更多研究学者能够对其进行深入研究,共同解决复杂场景下SAR目标检测及鉴别的难题。
