基于列控车载设备制动曲线的高速列车牵引计算平台
2020-03-17贺广宇郜新军李一楠郑理华程剑锋
贺广宇,郜新军,李一楠,郑理华,程剑锋
(中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
在新建高速铁路工程设计中,闭塞分区的设计和划分是信号工程设计中一项关键内容。闭塞分区过长,影响运输效率;闭塞分区过短,有可能危及行车安全。合理设计和划分闭塞分区对高速铁路行车安全和运输效率至关重要。闭塞分区长度与列控系统的符合性检算,确定列车追踪间隔时间,必须基于牵引计算的结果。所以,牵引计算是四电系统集成和信号工程设计的依托。
针对新建铁路客运专线闭塞分区长度符合性检算,无论采用国外的仿真软件,还是国内由设计院自主开发的列车牵引计算软件,均由于缺少列控车载设备制动曲线模型,存在不能有效验证闭塞分区设计与列控系统的匹配性问题。例如,大西客专设计时,未充分检算闭塞分区设计是否满足列控车载设备的制动距离要求,导致大西客专开通运营后,在大于20‰的坡道区段,要按照局部限速方案运行[1]。既有研究主要针对列车牵引计算模型[2]和列车追踪间隔时间计算方法及影响因素[3-6]进行分析,没有详细描述列车牵引计算过程中的列控车载设备制动曲线生成算法,需深入研究列控车载设备制动曲线对列车追踪间隔时间的影响。
因此,本文研究开发基于列控车载设备制动曲线的高速列车牵引计算平台,提出平台的技术架构和功能模块,设计列车运行仿真闭环系统;选取京沪高速铁路列控工程数据和动车组牵引制动参数,采用该平台完成高速铁路列车牵引计算和列车追踪间隔时间计算,验证该平台可用于闭塞分区长度符合性检算,从而验证闭塞分区设计与列控系统的匹配性。
1 技术架构
基于列控车载设备制动曲线的高速列车牵引计算平台采用HTML,CSS,JavaScript,Vue.js,Node.js和Koa等Web技术实现,使用MySQL数据库作为后端数据库,前后端分离构建B/S架构应用平台。技术架构如图1所示。
平台的技术架构由应用层、支撑层及相应的功能组件构成,分别如下。
(1)应用层:采用3层架构设计,包括展现层、服务层和数据层。展现层采用HTML,CSS,JavaScript和SVG可缩放矢量图形等Web前端技术,确保良好的用户体验。服务层按照功能将各业务模块和外部接口划分为不同的服务组件,降低系统模块间耦合,使系统具有较好的可扩展性。数据层将业务信息、配置信息和系统运行信息存储至数据库中。
(2)功能组件:包括平台运行所需的支撑性功能组件,包括报表、日志管理、数据库管理、数据可视化、界面显示管理、数据格式转换和仿真参数管理等组件。
(3)支撑层:包括支撑平台运行的软件和硬件。软件包括Koa开发框架、Vue.js渐进式框架、Node.js平台、MySQL数据库和服务器操作系统。硬件包括服务器、系统局域网和网络设备。
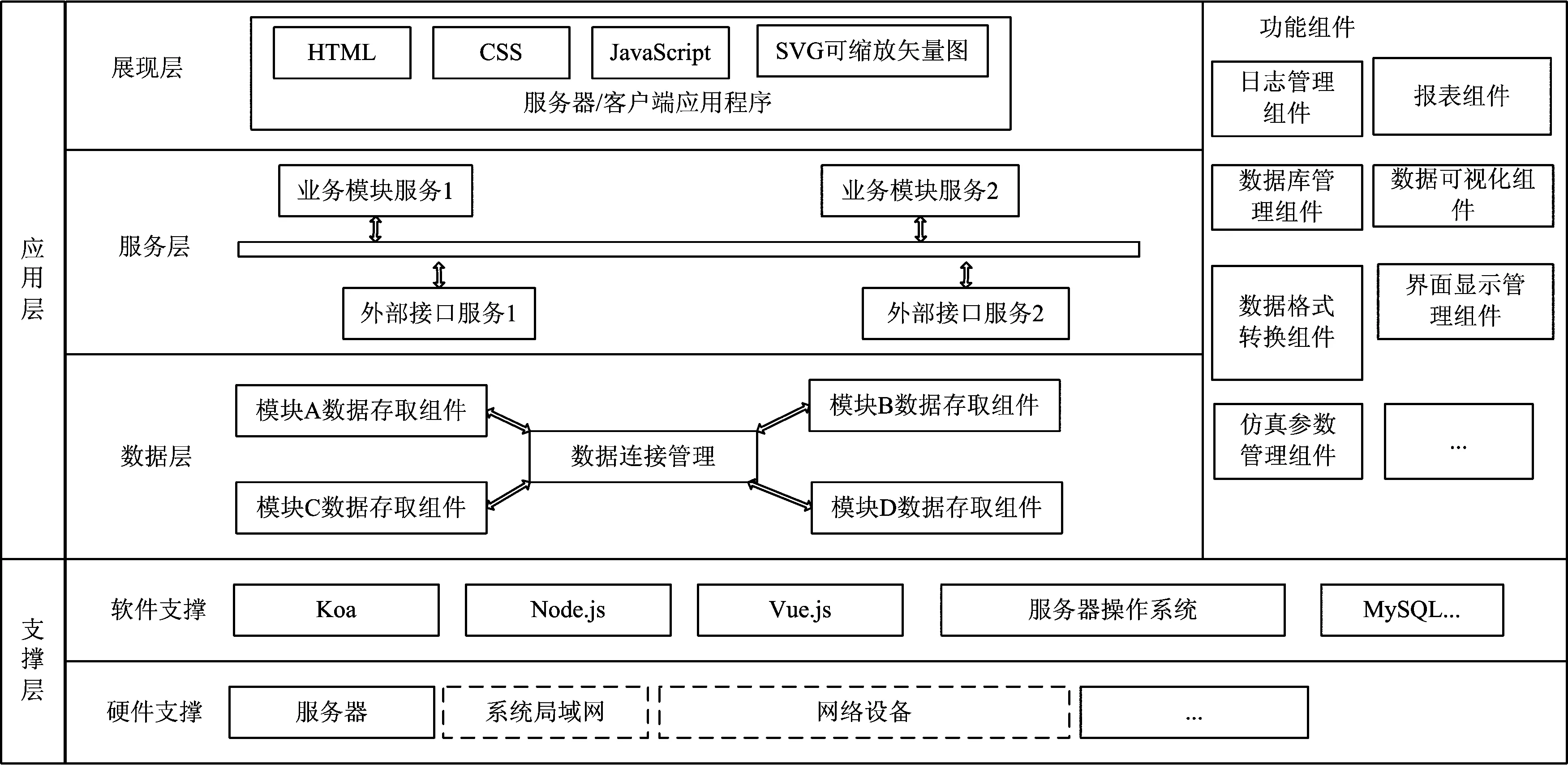
图1 基于列控车载设备制动曲线的高速列车牵引计算平台技术架构
2 功能模块
平台的功能模块包括基础数据处理、列车运行仿真、列车追踪间隔时间计算、闭塞分区检算和统计分析5个模块,如图2所示。各模块的组成及主要功能如下。
(1)基础数据处理模块:包括线路数据、仿真参数、动车组参数和信号系统参数的处理,其中线路数据具有固定格式和数据量大的特点,可实现批量导入和保存,以便快速完成多条线路的仿真分析;仿真参数、动车组参数和信号系统参数通过界面输入、保存和修改。
(2)列车运行仿真模块:包括列控车载设备制动曲线计算、站场线路图生成和列车运行仿真,其中列控车载设备制动曲线提供列车允许速度,具备超速防护功能;站场线路图提供地面数据仿真条件,正线采用列控工程数据导入生成,侧线站场图通过数据配置完成,本平台采用顶点和线条拓扑结构生成站场线路图,实现站场元素的便捷调整和列车路径的快速遍历;通过建立列车动力学模型实现不同工况下的列车运行仿真。
(3)列车追踪间隔时间计算模块:依据《高速铁路列车间隔时间查定办法》(Q/CR 471—2015)和高速列车运行仿真结果计算列车追踪间隔时间,包括列车区间追踪间隔时间I追、列车通过追踪间隔时间I通、列车出发追踪间隔时间I发和列车到达追踪间隔时间I到。
(4)闭塞分区检算模块:包括闭塞分区数据导入、线路坡度数据导入和闭塞分区长度符合性检算,导出闭塞分区长度符合性检算结果。
(5)统计分析模块:包括追踪间隔限制点信息、列车区间运行时间、列车速度—距离曲线和列车时间—距离曲线的统计分析,生成统计结果,导出列车仿真运行曲线图。
3 关键技术
3.1 列控车载设备制动曲线生成算法
列车运行仿真模块中的列控车载设备制动曲线计算,是根据移动授权、线路数据及动车组制动性能确定列车制动曲线[7],其中CTCS3—300T,CTCS3—300S和CTCS2—200C实时计算列控车载设备制动曲线,CTCS2—200H和CTCS3—300H通过查表法计算列控车载设备制动曲线。各个型号列控车载设备的制动参数配置和制动曲线计算方法存在差异[8],本平台采用文献[9]的计算方法。
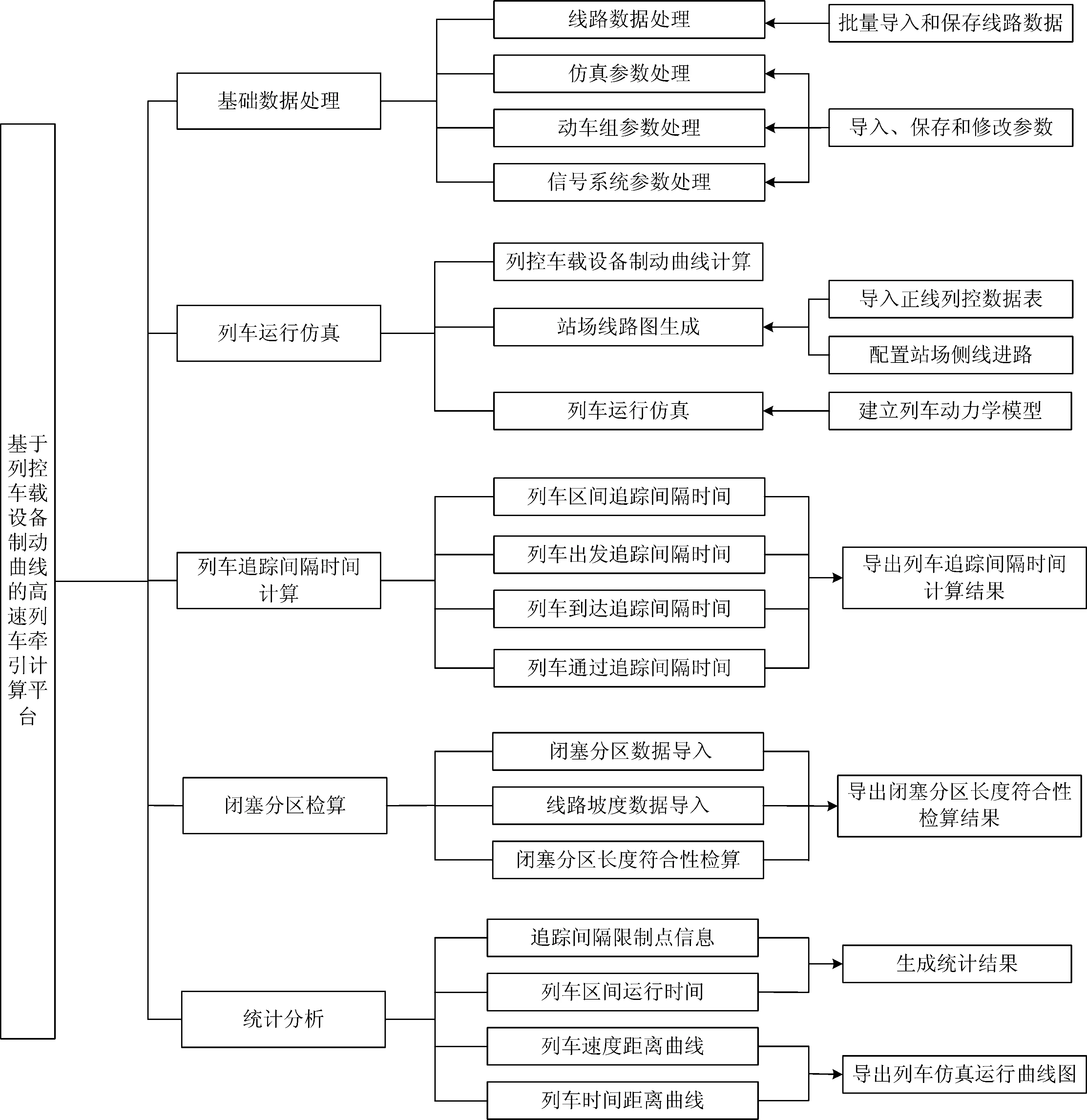
图2 基于列控车载设备制动曲线的高速列车牵引计算平台功能框图
以CTCS2—200C列控车载设备为例,取线路坡度i=0‰,限制速度vpermit=250 km·h-1,制动参数取CRH1型动车组的,采用文献[9]的计算方法计算生成列控车载设备制动曲线,包括紧急制动曲线、常用制动曲线、紧急制动触发曲线和常用制动触发曲线,如图3所示。
3.2 列车运行仿真
根据动能定理推导列车运动方程,其中列车受力分为牵引、制动和惰行3种工况确定,从而仿真计算列车的加速度、速度和距离,实现列车运行仿真。
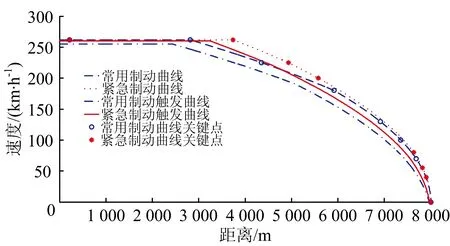
图3 列控车载设备制动曲线
根据动能定理推导的列车运动方程为[10]
(1)
(2)
其中,
(3)
(4)
式中:Δt为列车在每个速度间隔内的运行时间,h;Δs为列车在每个速度间隔内的运行距离,km。v2和v1分别为每个速度间隔内的初速度、末速度, km·h-1;F为每个速度间隔内列车所受的单位合力,N·kN-1;γ为回转质量系数,γ=0.08;f为列车单位牵引力,N·kN-1;b为列车单位制动力,N·kN-1;ω0为列车单位基本阻力,N·kN-1;ωj为坡道附加单位阻力,N·kN-1;ωq为曲线附加单位阻力,N·kN-1;ωs为隧道附加单位阻力,N·kN-1。
曲线附加单位阻力和隧道附加单位阻力采用经验公式计算,这里不再赘述。坡道附加阻力需考虑前方变坡点前后的路段对附加阻力的影响,因此分为车头和车尾在同一个坡度区段和不在同一个坡度区段2种情况,计算方法分别如下。
(1)车头和车尾在同一个坡度区段上
ωj=i
(5)
(2)车头和车尾不在同一个坡度区段上

(6)
式中:ifront和irear为车头、车尾所在坡道的坡度, ‰;dfront和drear分别为车头、车尾所在位置的数值,m;df为车头所在坡度区段起始位置的数值,m;dr+1为车尾所在坡度区段终点位置的数值,即下一段坡度区段起点位置的数值,m;dn为从车尾至车头遍历过程中索引为n的坡度区段起始位置的数值,m;in为从车尾至车头遍历过程中索引为n的坡度区段的坡度,‰;L为列车长度,m。
基于式(1)—式(6),设计列车运行仿真闭环系统,该系统由列车动力学模型、列控车载设备制动曲线算法、线路信息和速度控制组成,如图4所示。其中列车动力学模型包括牵引、制动和惰行3种工况下的列车受力分析。列控车载设备制动曲线采用文献[9]的算法生成,根据移动授权和列车速度、距离信息计算列车允许速度,当列车超速时输出制动指令。线路信息包括闭塞分区、线路速度、线路坡度、自动过分相和列车进路等基础数据。速度控制模块根据列车当前速度、允许速度和制动指令确定列车运行的工况状态(牵引、惰行和制动)。

图4 列车运行仿真闭环系统
通过对现场司机实际操纵列车运行过程的调研,设计列车运行仿真速度控制策略如下。
(1)列车发车时,按照最大牵引级位加速列车至列控车载设备允许速度,在顶棚速度区域(CSM)按照允许速度运行。
(2)当列车运行至自动过分相区时,仅允许制动和惰行。
(3)当列车接近目标速度监控区(TSM)时,提前将列车速度减至低于允许速度5 km·h-1,进入TSM区域后执行80%的制动力减速列车,按照低于允许速度5 km·h-1控制列车减速运行。
(4)列车进站越过停车位置标后,施加最大常用制动使列车停车。
4 列车追踪间隔时间计算
基于仿真的列车运行过程,解算列车运行时分和运行距离,依据《高速铁路列车间隔时间查定办法》(Q/CR 471—2015)中关于列车区间追踪间隔时间I追、列车通过追踪间隔时间I通、列车出发追踪间隔时间I发和列车到达追踪间隔时间I到[11]的计算方法,计算各追踪间隔时间,验证闭塞分区设计是否满足最小追踪间隔时间要求。
为了验证基于列控车载设备制动曲线的高速列车牵引计算平台,导入京沪高速铁路列控工程数据表,采用CRH3A型动车组牵引和制动参数,考虑坡道附加阻力,忽略影响较小的曲线附加阻力和隧道附加阻力,计算京沪高铁上、下行线列车运行速度和列车区间及通过追踪间隔时间曲线,如图5所示。根据图5,针对上、下行选取列车区间追踪间隔时间和列车通过追踪间隔时间最大值,作为京沪高速铁路的追踪间隔时间,见表1;取上、下行中的较大值,则得I追=152.1 s,I通=183.4 s。可见,I通>I追,这是由于办理通过进路作业时间和列车出清出站第1个闭塞分区的影响。

图5 京沪高速铁路上、下行线列车运行速度和列车区间及车站通过追踪间隔时间曲线
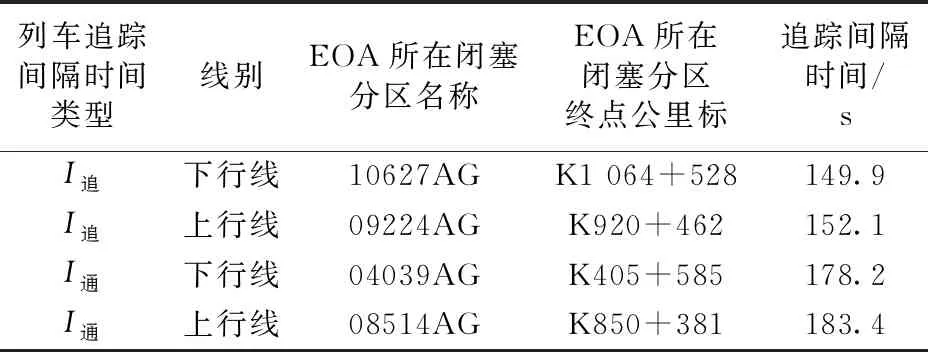
表1 京沪高速铁路列车区间和通过追踪间隔时间
考虑客运专线典型的4股道和6股道站场结构,选取廊坊站和天津南站作为研究对象,其列车在站内发车后的速度—距离曲线如图6所示。

图6 廊坊站和天津南站列车出站速度—距离曲线
由图6可知:天津南站侧线发车80 km·h-1限速距离较长,其原因是天津南站侧线发车限速80 km·h-1进路长度为244 m,廊坊站3G和4G侧线发车限速80 km·h-1进路长度分别为162和168 m;天津南站6G发车后运行速度下降,这是由天津南站上行线出站一离去K121+738至K121+242存在分相区导致的;廊坊站4G列车出发追踪间隔时间较长,这是因为廊坊站4G上行线出站—离去区段终点为2 026 m,天津南站上行线出站—离去区段终点为1 905 m。综上所述,列车出发追踪间隔时间与出站—离去区段终点的长度、侧线岔区长度和分相区位置相关。
根据图6,针对上、下行,分别选取廊坊站和天津南站列车出发追踪间隔时间的最大值,作为2站的出发追踪间隔时间,见表2;取上、下行中的较大值,则廊坊站I发=151.7 s,天津南站I发=152.2 s。

表2 廊坊站和天津南站的I发
廊坊站和天津南站进站停车的列车速度—距离曲线和列控车载设备生成的列车允许速度—距离曲线分别如图7和图8所示。
由图7和图8可知:列车在3 000 m左右允许速度抬升,这是因为天津南站和廊坊站接车二接近闭塞分区入口处移动授权终点由进站信号机更新为出站信号机;天津南站进站后提前降速,而廊坊站进站列车维持在80 km·h-1通过侧线岔区,这是因为天津南站股道长度短于廊坊站,其中天津南站5G和6G从反向出站信号机至正向出站信号机的股道长度为608 m,廊坊站3G从反向出站信号机至正向出站信号机的股道长度为1 441 m,廊坊站4G从反向出站信号机至正向出站信号机的股道长度为1 371 m,受线路坡度影响各个股道接车的制动距离存在差异。综上所述,列车到达追踪间隔时间与线路坡度、闭塞分区长度、侧线岔区和股道长度相关。
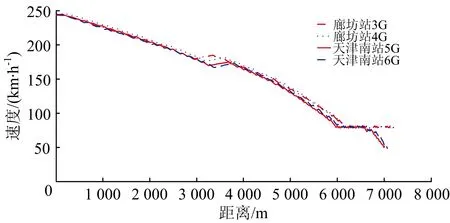
图7 廊坊站和天津南站进站停车的列车速度—距离曲线
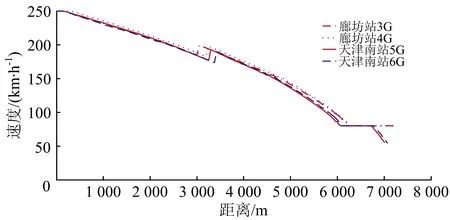
图8 廊坊站和天津南站进站停车列控车载设备生成的列车允许速度—距离曲线
根据图7和图8,针对上、下行,分别选取廊坊站和天津南站列车到达追踪间隔时间的最大值,作为2站的到达追踪间隔时间,见表3;取上、下行中的较大值,则有廊坊站I到=217.9 s,天津南站I到=218.6 s。

表3 廊坊站和天津南站的I到
5 结 语
为了有效验证闭塞分区设计和列控系统的匹配性,本文提出了基于列控车载设备制动曲线的高速列车牵引计算平台,包括基础数据处理、列车运行仿真、列车追踪间隔时间计算、闭塞分区检算和统计分析5个模块。其中列车运行仿真为牵引计算平台的核心,由线路信息、列车动力学模型、列控车载设备制动曲线算法和速度控制组成,列控车载设备制动曲线算法具备列车超速防护功能,根据移动授权和列车速度距离信息生成允许速度和制动指令,实现列车运行仿真的闭环处理。
选取京沪高速铁路列控工程数据和CRH3A型动车组参数进行列车牵引计算,得到京沪高速铁路的列车追踪间隔时间。可见,该平台可用于闭塞分区长度符合性检算,从而验证闭塞分区设计与列控系统的匹配性,具有较高的理论和实用价值。