基于模糊PID算法的履带式机器人
2020-03-13张兆云
张兆云

摘 要:机器人学是当前科学技术非常活跃的一个行业。而履带式机器人是所有机器人中的一个重要组成部分,该机器人集运动决策系统、无线通讯系统、环境感知系统以及智能控制系统等于一体。而当前在平坦的地面环境中对于履带机器人的研究已经获得了许多的成果,但是仍旧需要不断的进行研究。文章将通过对于履带式机器人的运动学模型开展分析,将PID控制技术应用在履带式机器人的运动控制中。
关键词:履带式机器人;PID;运动控制;实现策略
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2020)08-0057-02
Abstract: Robotics is a very active industry in science and technology at present. The tracked robot is an important part of all robots, which integrates motion decision-making system, wireless communication system, environment perception system, intelligent control system and so on. At present, many achievements have been made in the research of tracked robot in the flat ground environment, but it still needs to be studied continuously. In this paper, through the analysis of the kinematics model of the tracked robot, the PID control technology is applied to the motion control of the tracked robot.
Keywords: tracked robot; PID; motion control; implementation strategy
由于模糊控制自身的魯棒性非常好,并且其干扰、参数变化等方面的影响也在很大程度上被降低,不会依赖精确的数学模型,因此,结合两种控制方法,能够有效地实现基于模糊算法的履带式机器人。
1 驱动结构
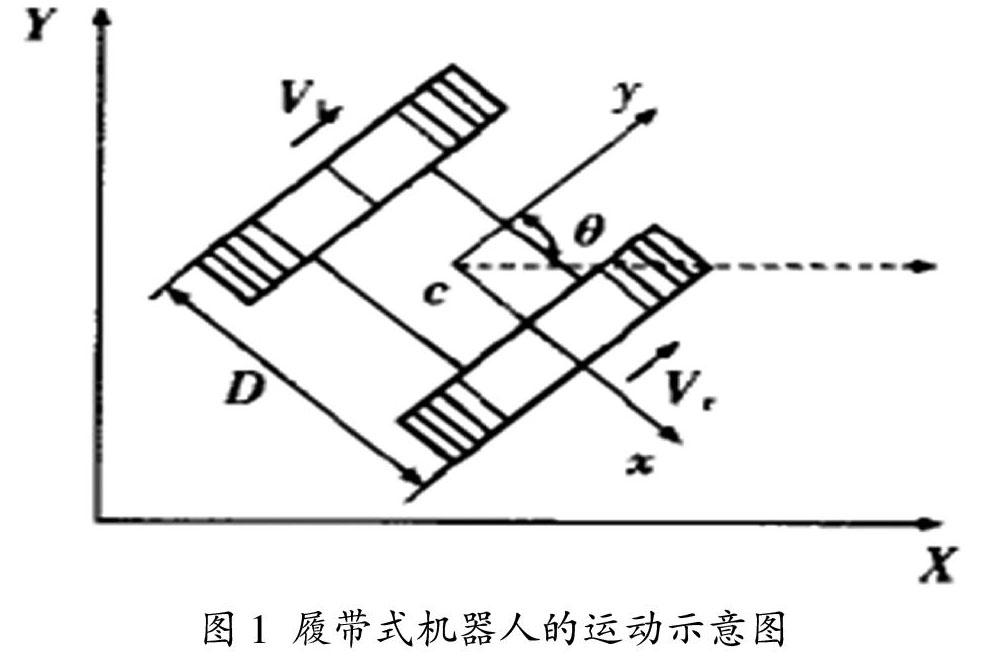
本文所涉及的履带式机器人其驱动系统的动力源为15V蓄电池供电。该驱动系统是通过双直流电机独立驱动左右两侧主动轮的方式,该硬件结构非常的简单,并且在直行、制动以及转弯的过程中,能够更加方便的对于机器人的左、右履带进行分别控制,并且履带式机器人的左、右履带电动机的硬件参数、性能方面基本上是相通的[1]。如下图1所示为履带机器人的运动示意图。
2 履带式机器人的控制模型
通过利用MATLAB的工具箱,可以在实际的环境中获取数据,除此之外还可以对于数据进行分析、处理等,同时还能够建立控制对象模型。但是需要使用如下工具:
(1)Avstem ldenti6cation Tooloox由实测的输入、输出数据来对线性模型的交互式工具环境开展辨识、数据简化处理以及模型的反复预测等。
(2)Signal processing Tooloox可以提供进行信号分析、时序系统建模等相关的工具。
(3)Data Acquisition Tooloox提供基于pc的插卡式数据采集硬件,然后获取数据。
基于以上的工具箱,系统控制模型为:
3 履带式机器人的运动能力分析
3.1 爬坡能力分析
履带式机器人的爬坡性能通常是屈居于底盘系统的驱动力、斜面的粗糙程度、接地比压条件、斜面的倾斜角大小等众多因素。而本文所分析的履带式机器人的爬坡性能则是取决于系统的驱动力、斜坡倾角,这一方式更加容易控制,并且受到其他因素的影响非常小,同时还具有良好的爬坡稳定性。
3.2 越障能力分析
履带式机器人在运动过程中难免会遇到许多的障碍物,所以,越障能力是否良好成为了衡量机器人性能的一个重要指标。而本文所研究的履带式机器人能够翻越垂直障碍物。当履带能够变形的一侧遇到垂直障碍物的时候,机器人可以自动调整自身的旋转臂位置,从而调整姿态翻越障碍,同时保持机体的平衡与稳定。当履带可变形机器人在翻越障碍物的过程中,通过同样原理,调整机器人的旋转臂并控制履带机器人的姿态,从而实现翻越障碍物[2]。
3.3 爬楼梯能力分析
楼梯作为一种特殊的障碍物,对于履带式机器人而言,具有一定的难度。攀爬楼梯是爬坡、越障相结合的一种运动,也可以认为是履带式机器人持续上台阶的一种爬坡运动。本文的履带式机器人在进行楼梯的攀爬过程中,可以将其分为以下几个步骤:首先,机器人对准楼梯,并将机器人的前旋转臂与第一阶台阶之间相互作用,抬起机器人的前旋转臂。其次,机器人的前旋转臂攀爬到第一个台阶上,并且部分履带将会进入到台阶[3]。然后机器人的前旋转臂在此时会大部分进入到台阶上,并且后旋转臂与地面部分仍有接触。再次,履带式机器人将会完全与地面之间脱离,并在台阶上进行爬坡运动。最后,履带式机器人在达到台阶顶部之后,通过对于前后旋转臂的姿态进行调整,以此来使履带式机器人与楼梯顶部台阶之间呈现出平行状态,此时将完成攀爬运动。
4 模糊自整定PID控制系统
履带机器人在进行运动的过程中,不需要工作人员操作,但是如果不具备反馈的开环控制的话,将会导致输出不稳定。基于这一情况,本系统通过采集超声波传感器、姿态传感器、电机编码器等部分数据组成一个闭环控制系统,该系统能够更为精准的控制机器人的姿态,通过与PID 控制算法进行结合,可以使机体实现运动过程中的安全、自动、稳定。实现过程:首先,对于履带机器人发送运动的控制目标指令,并将机器人在运动过程中的姿态体积位置信息采集下来,然后将当前方向与目标方向之间所存在的偏差与偏差变化率作为系统输入,并采用粒子群优化的模糊PID控制器进行处理之后,实时输出PID的3个参数,通过PWM信号占空比调节直流电机电压对于机器人进行调速,同时,履带机器人将会根据电机编码器上反馈速度以及机器人机体上的反馈姿态,构成一个双闭环控制系统,这样可以有效地保障履带机器人的运动与控制精度。相较于传统的单闭环控制系统,两闭环控制系统具有着较强的抗干扰能力,同时还可以有效地避免某一个传感器发生问题之后失去控制能力,具有较高的系统可靠性。
4.1 模糊自整定PID控制系统
在对其进行模糊控制处理后,进行动态输出KP、Ki、Kd可以实现PID控制参数的自整定,从而实现对于履带机器人的控制作用。在非线性系统履带式机器人中进行应用也可以获得良好的控制作用。
4.2 输入输出量的模糊化
模糊集合输出语言变量为KP、Ki、Kd,在语言值方面对其分别定义为“零(ZO)”、“负小(NS)”、“负大(NB)”、“正小(Ps)”、“正中(PM)”以及“负中(NM)”,模糊集合的输入语言变量为误差变化率Ec、速度的误差E,设定Kd的基本论域为[-6,+6]、KP的基本论域为[-0.3,+0.3]、E,Ec的基本论域为[-6,+6],Ki的基本论域为[-0.06,0.06]。
利用比例因子,模糊化实际的输入量,然后处理到E和Ec论域。
4.3 建立模糊规则
基于PID控制经验,在MATLAB中建立模糊控制输入、输出隶属函数。模糊控制规则的形式语句使用KP的基本论域为IF THEN,而形式IFxIS A and y IS B,THEN z IS C。x、y为输入变量,推理结果采用z表示,A、B、C为模糊集,采用隶属函数表示。以履带机器人系统的实际需求为基础,在MATLAB上进行模糊控制规则的建立。
4.4 输出量解模糊化
通过将语言表達的模糊变量进行恢复,使其成为一个精确的数值,就是解模糊化。简单来说,就是输出模糊子集的隶属度函数,然后对于该输出的确定值进行计算。而开展精确化计算有很多的方法,最大隶属函数方法就是其中最为简单快捷的一种。
5 仿真分析
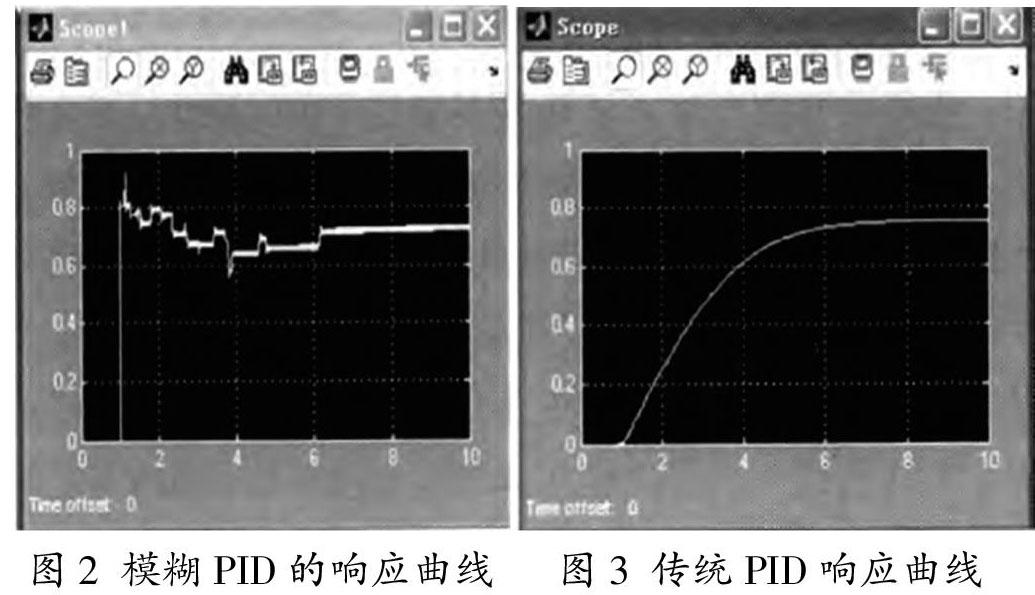
为了验证该控制器的有效性,对于模糊PID控制以及传统的PID控制分别进行仿真实验。将上述的仿真模型在MATLAB仿真工作区间进行加载,然后可以得到传统PID与模糊PID的控制速度响应曲线。如下图2、3所示。
模糊PID控制相较于传统PID控制之间,超调量发生了明显的降低情况,并且具有更为平滑的控制效果,同时还缩短了调节时间,拥有了更好的系统的稳定性,使控制系统的动态性能得到改善。
6 结束语
综上所述,本文首先对于履带式机器人驱动结构进行了分析,并在此基础上分析了履带式机器人的运动控制能力,并在此基础上提出了履带机器人的运动控制策略,最后对于履带式机器人的传统PID运动控制进行了仿真分析。
参考文献:
[1]柴钰,王乔.粒子群优化模糊PID的履带机器人运动控制研究[J].现代电子技术,2018,41(18):49-53.
[2]兰二斌,杨登杰,覃继灿, 等.陆空两栖机器人的结构设计与运动控制研究[J].工业控制计算机,2019,32(6):58-60.
[3]褚芃,薛亮.智能小区巡视机器人运动控制与避障系统的设计[J].文存阅刊,2019(22):178.
