空间非合作目标物柔性捕获技术进展
2020-03-13郭吉丰谭春林刘永健孙国鹏
郭吉丰,王 班,2,谭春林,刘永健,孙国鹏
(1. 浙江大学电气工程学院,杭州 310027;2. 杭州电子科技大学机械工程学院,杭州 310018;3. 北京空间飞行器设计总体部,北京 100094)
0 引 言
在轨服务系统的目标航天器一般分为合作目标和非合作目标。合作目标经过特殊设计具有与服务航天器相适应的结构组件、信标或对接机构,而非合作目标则与服务航天器间无相应适配机制,如空间碎片、废弃卫星以及敌方卫星等均属于此类。空间非合作目标在轨服务技术实现难度要远大于合作目标的实现难度,然而,目前大多数的客户系统均为未经过特殊设计的,因而非合作目标在轨服务技术是亟待解决的难题,而非合作目标物的捕获技术则是实现在轨服务的重要前提之一。
空间机器人技术的逐渐成熟使得刚性捕获方式更早地投入实际航天工程运用[1-3],如美国的轨道快车(Orbital Express)计划[4],加拿大的空间机械臂系统(SRMS)[5],欧洲宇航局的欧洲机械臂系统ERA[6],日本的JEMRMS(Japanese Experimental Module Remote Manipulator System)机械臂系统[7]与ETS-Ⅶ[8],德国的机器人技术试验ROTEX(Roboter Technology Experiment)项目[9]等。上述任务系统均以刚性机械臂作为捕获执行机构,捕获距离受限,且需在捕获机构上安装距离、力/力矩、触觉等传感器以保证对接碰撞过程的安全,特别是在空间悬浮状态下多刚体机械臂捕获目标物后质心、转动惯量等系统参数易发生改变以及目标物自旋给系统控制带来较大困难,对空间非合作目标捕获难以奏效。柔性捕获概念是近年提出的,以网或布等柔性结构覆盖包裹目标物或通过机械手抓取目标物后通过柔性连接物(如绳索)与任务航天器形成可靠连接的组合体,是近年来空间研究的热点之一[10]。国外多家知名航空机构都早有布局,对空间非合作目标物的柔性捕获进行过相关研究[11-13]。国内相关研究院所及高校也对柔性捕获技术进行了大量的研究,取得了一定研究成果。空间柔性捕获技术涉及到力学、机械、电气、控制及材料等多个学科,在总体方案设计、动力学分析及控制系统设计等多个方面都存在较多的科学问题需要研究,国内尚未有文献对空间非合作目标物柔性捕获中的相关关键技术进行综述与分析。本文对空间非合作目标物捕获过程中涉及到的捕获方式、消旋技术、系绳模型及系绳控制机构等技术进展进行分析与讨论,最后给出了一些具体建议。
1 空间非合作目标物柔性捕获方式
空间柔性捕获技术的柔性一般体现为末端捕获装置的柔性(如绳网、口袋等),也可体现为捕获后目标物与任务平台之间的柔性连接(如飞爪等绳系捕获)。根据捕获执行机构的不同,柔性捕获一般可分为绳网捕获、飞爪捕获及柔性口袋捕获等。
1.1 绳网捕获
空间绳网捕获是在空间展开一张大面积的绳网对空间目标物进行捕获的技术,是空间柔性捕获中较为成熟的技术之一。绳网的展开有多种方式,如抛射展开、旋转展开、自主机动展开及支撑展开等。
1.1.1抛射展开
空间绳网抛射是空间绳网捕获技术中最为广泛展开方式[14-16],具有原理简单、展开迅速等优点,但同时绳网保形时间较短,适用于空间非合作目标物的快速捕获[17]。
2002年,欧洲航天局ESA (European Space Agency)提出了地球同步轨道清理机器人ROGER项目[11]。ROGER机器人捕获过程如图1所示,ROGER被发射进入地球同步转移轨道GTO (Geostationary Transfer Orbit)后与运载火箭分离,然后在远地点点火机动至地球同步轨道GEO (Geosynchronous Earth Orbit)附近,并经过多次轨道机动与目标物进行交会,当ROGER和非合作目标物距离在捕获范围内时向非合作目标物发射绳网,绳网在发射过程中完全展开并将非合作目标物完全包裹、锁紧而完成捕获,ROGER再次点火机动将绳系组合体拖曳至更高的坟墓轨道并切断系绳,而后ROGER返回GEO,准备下一次捕获任务。ROGER项目利用发射器将4个质量为1 kg的质量块发射,将绳网拉出、展开,属于典型的抛射展开。该项目在2003年完成方案评审后未见后续公开报道,直至2014年,ESA在巴黎又发布了一份声明,称其在“清洁太空行动(Clean Space Initiative)”中正在研究的“脱轨”任务(DeOrbit Mission)将致力于清除和收集轨道垃圾以减少航天产业给地球和太空带来的环境冲击,对诸如抛射网、夹紧机构和鱼叉在内的多种捕获装置进行研究,此项目可看作是ROGER项目的延续。2015年,ESA在猎鹰20抛物线飞机模拟的失重环境中进行了绳网捕获系统的缩比试验[18],该试验主要验证所设计的仿真工具的有效性,为将来设计真实尺寸的绳网捕获系统奠定基础。
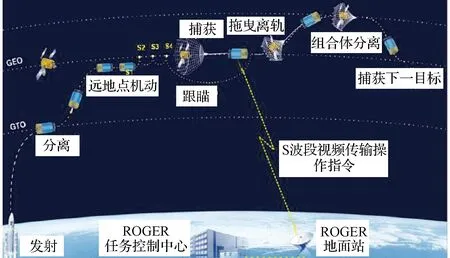
图1 ROGER空间绳网捕获过程概念图
2006年开始,我国也立项对空间绳网捕获技术开展相关研究,捕获系统由任务平台、系绳收放装置、系绳、绳网和若干收口质量块等组成[19]。在捕获动作进行的前期,任务平台调整到与目标物较近距离(百米级),通过发射器将柔性绳网发射,抛射的质量块牵引展开绳网,使其快速接近目标物,当目标物完全落入绳网内后,收口质量块动作,将网口收紧锁死,而后系绳收放装置根据要求对目标物进行回收、释放及拖曳,并通过任务平台的轨道调整使二者进入预定的废弃轨道。此项目在绳网发射技术、柔性绳网形状及折叠方式、绳网收口质量块技术、系绳收放装置技术以及绳网展开、收口及捕获后绳系组合体的动力学分析及控制等理论方面,取得了一定的研究成果[20-23],为后续空间试验验证奠定了坚实基础。
1.1.2旋转展开
旋转展开是利用旋转离心力展开空间绳网,采用合适的控制策略对展开后的绳网进行保形控制。这种展开方式可以克服直接抛射展开方式中容易出现的绳网缠绕以及绳网保形时间短等问题,使得绳网展开稳定性有所提高。
2009年美国恒星公司提出了一种依靠电动力推进的自主捕获航天器——电动碎片清除装置EDDE[12]。该装置原理如图2所示,主要由一根长导线、太阳能电池板、电子收集发射器和2个用于发射轻质绳网的绳网管理器组成,其携带的绳网用来包裹和捕获太空垃圾。每个绳网管理器系统大约配备100个重约50 g的Kevlar绳网,绳网通过EDDE的旋转力展开,当目标物被捕获后,即使目标物的旋转、翻滚速度超过1 rpm,EDDE也能很快将目标物的运动衰减下来。恒星公司计划向太空发射12架EDDE航天器,可捕获当前漂浮在近地轨道的所有超过2 kg的2465个可识别目标。
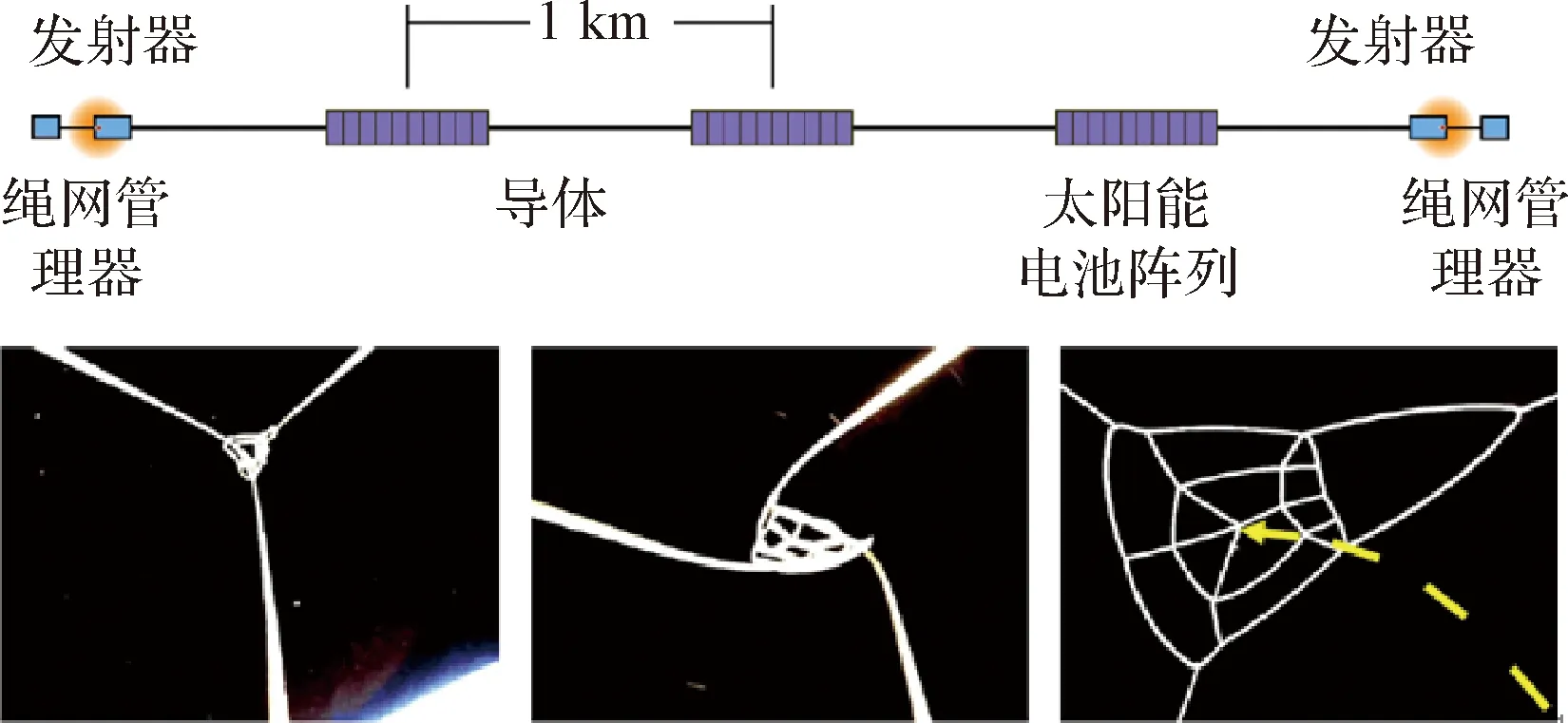
图2 电动力绳系捕获EDDE原理图
2012年3月,英国的思克莱德大学、格拉斯哥大学联合瑞典皇家理工学院在瑞典发射基地ESRANGE进行一项名为Suainead的试验,旨在对空间旋转绳网展开进行技术验证[24]。旋转绳网系统从火箭锥部的发射筒进行弹射发射,系统发射时处于旋转运动状态,并使用特定的旋转反作用飞轮进行系统旋转主动控制。当系统达到稳定旋转状态时,释放一个2 m×2 m的方形绳网,利用绳网角上连接的质量块旋转产生的离心力带动绳网的展开,该试验证明了通过旋转实现空间绳网展开的可行性。
1.1.3自主机动展开
前述抛射展开及旋转展开式绳网系统中,质量块都不具有自主机动功能,主要依靠质量块发射时的平动速度或者系统旋转速度将绳网展开,其优点是结构简单、易于工程实现,但同时也存在诸如捕获距离短、机动性差等问题,而自主机动展开就是通过若干具有自主机动功能的质量块或者微小卫星进行空间编队飞行,通过编队构形的变化实现绳网的展开。
2001年,日本东京大学提出了Furoshiki项目概念[25],该系统由四颗角卫星及其连接的巨大柔性膜(绳网、太阳能薄膜或者空间大型天线)组成,如图3所示,利用四颗角卫星将柔性膜展开,可在空间展开高达数千米的巨型平面结构。根据柔性膜的不同(绳网、太阳膜和天线),Furoshiki可分别应用于空间大型目标捕获、空间太阳能发电和辅助通讯等方面。当其连接绳网进行空间捕获时,系统复杂,成本较高,适合抓捕高价值的大型重要目标。
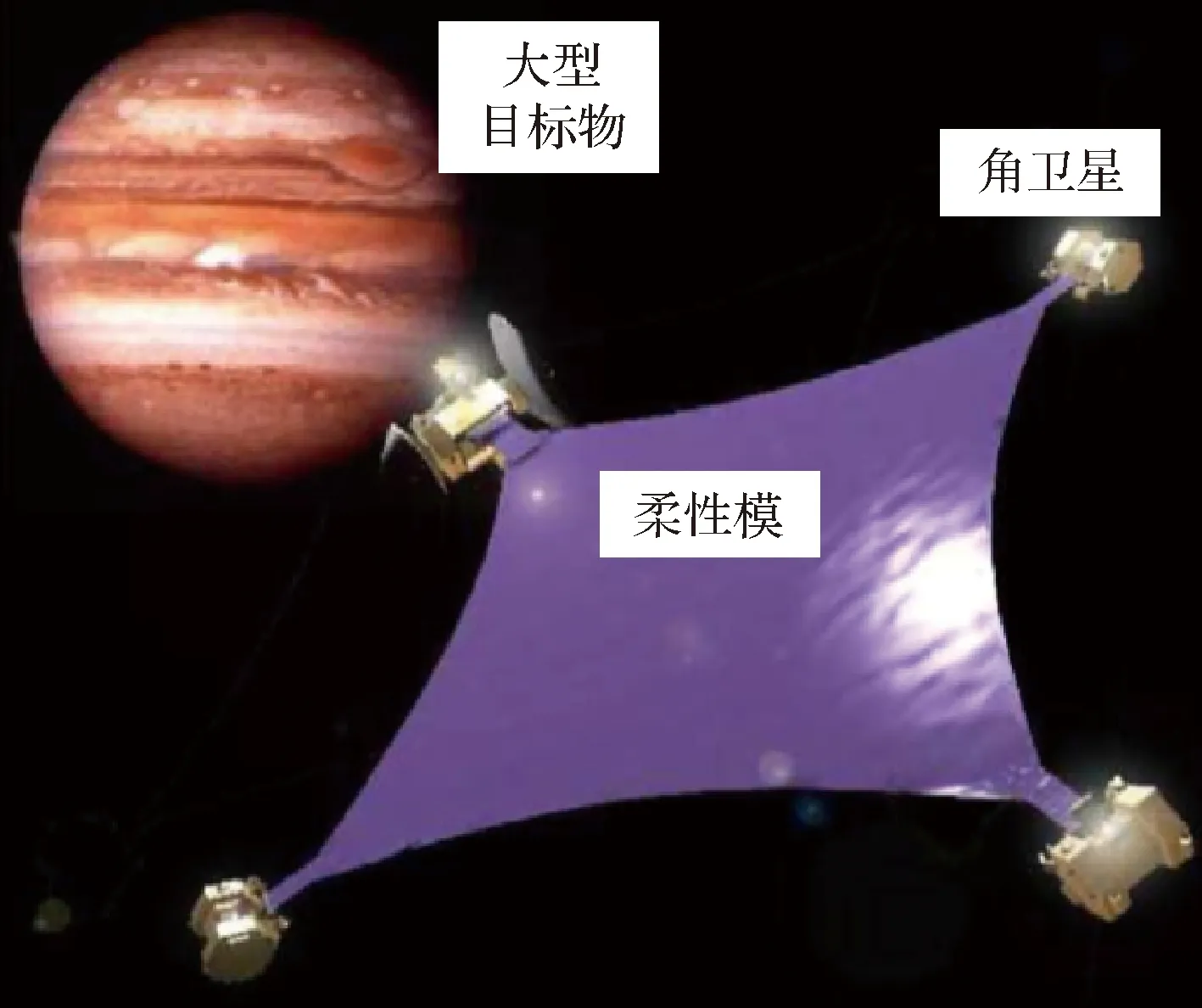
图3 Furoshiki项目示意图
2013年,西北工业大学的马骏等[26]针对现有绳网捕获系统任务距离和目标多样性方面的不足,提出了一种新型的“任务平台+连接系绳+绳网+自主机动单元”结构的空间绳网机器人系统,如图4所示,这种自主机动单元编队捕获方式克服了传统空间绳网捕获机器人在操作性和机动能力方面的不足,但此种新型绳网捕获系统仍然需要利用系绳将任务平台与绳网系统进行连接,系统设计相对复杂。
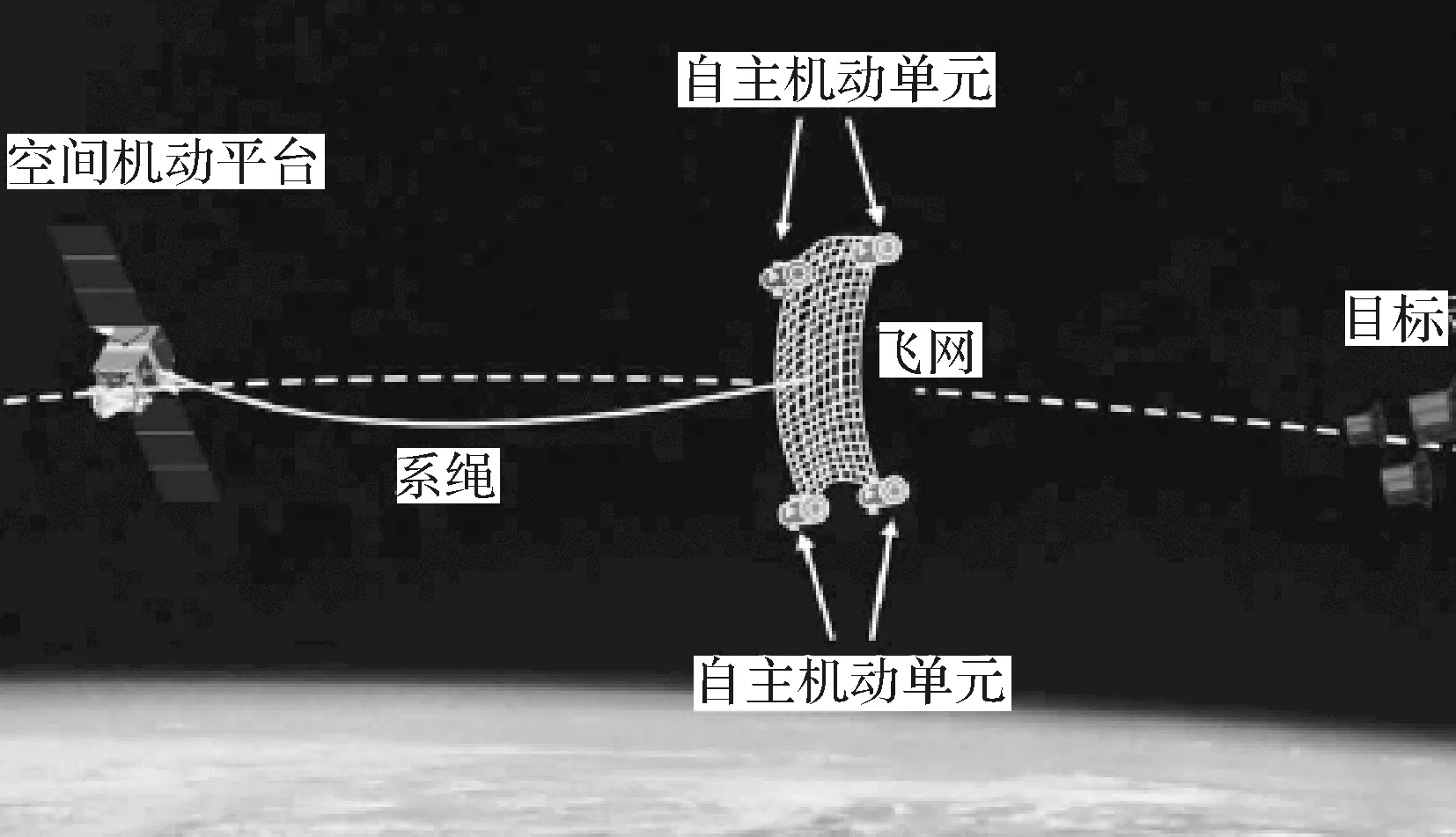
图4 新型空间绳网捕获机器人
针对传统绳网捕获系统存在的发射要求高、捕获距离短及机动性差等问题,浙江大学王班等[27]于2016年提出一种基于可重组绳系编队飞行的自主机动空间绳网捕获系统的概念。此绳网捕获系统采用四个具有弹射分离与对接组合功能的微卫星,结合收口绳进行空间编队飞行,通过编队构形的变化并结合系绳收放控制实现绳网的展开、保持与收缩等操作。可重构绳系编队方式突破了传统绳系编队飞行系统编队前后各飞行器的同步性难题。
1.1.4支撑展开
支撑展开式绳网系统是利用刚性支撑件将绳网展开,由于发射过程对绳网载荷有体积要求,所以需要利用可压缩式支撑件展开绳网,如充气式或薄壁伸缩臂展开。
2004年,美国TUI(Tethers Unlimited, Inc.)公司成功开发了应用于空间非合作目标捕获的GRASP(Grapple, Retrieve, And Secure Payload)技术,通过对充气软管充气可控地展开一张柔性网对目标物进行包裹、抓捕。为了验证所设计的充气管式末端绳网捕获机构的实用性与有效性,TUI于2014年在抛物线飞机的零重力环境下进行了模拟捕获试验,捕获效果良好[28]。
1.2 绳爪捕获系统
上述ROGER捕获系统的另一种抓捕方法是绳爪(Tether-gripper mechanism, TGM)捕获方式,绳爪末端与系绳连接,并可自由飞行,TGM带有冷气推进系统,每个推进器可提供1 N的推进力,并带有两个立体摄像机和一个激光测距仪,在TGM的上平台顶部安装有一个三指飞爪,用于抓捕目标物,通过平台上的卷绕电机收放系绳实现飞爪控制[11]。
2006年,日本宇宙航空开发机构JAXA(Japan Aerospace Exploration Agency)提出的一种利用电动绳系进行低轨废弃物清理的设想SDMR(Space Debris Micro-Remover)项目[29-30]。如图5所示,SDMR其工作过程为:捕获机器人首先机动与目标物完成交会并对目标物的运动情况进行侦查、测量,然后经过绕飞后完成与目标物的最终接近并通过可伸展捕获爪捕获目标物,捕获目标物后释放电动力系绳,此系绳与捕获爪根部相连,最后通过机器人的喷气推力与系绳电动力完成组合体的轨道转移。

图5 日本SDMR项目示意图
2009年,西北工业大学的胡仄虹等[31]提出了一种“空间平台+空间系绳+操作机器人”的绳爪式空间绳系捕获机器人,操作机器人上自带操作机械臂及末端操作爪用于执行捕获目标卫星及在轨服务任务。如图6所示,空间系绳固连在操作机器人底部中心部位,另一端与空间平台连接,抓捕目标时,相机进入测量盲区接近并引导操作机器人靠近目标,并将其锁紧限制于某一范围内实现防止目标逃逸。此种绳爪式捕获方式具有操作半径大、灵活性强的特点,且继承了空间机械臂良好的操作功能。
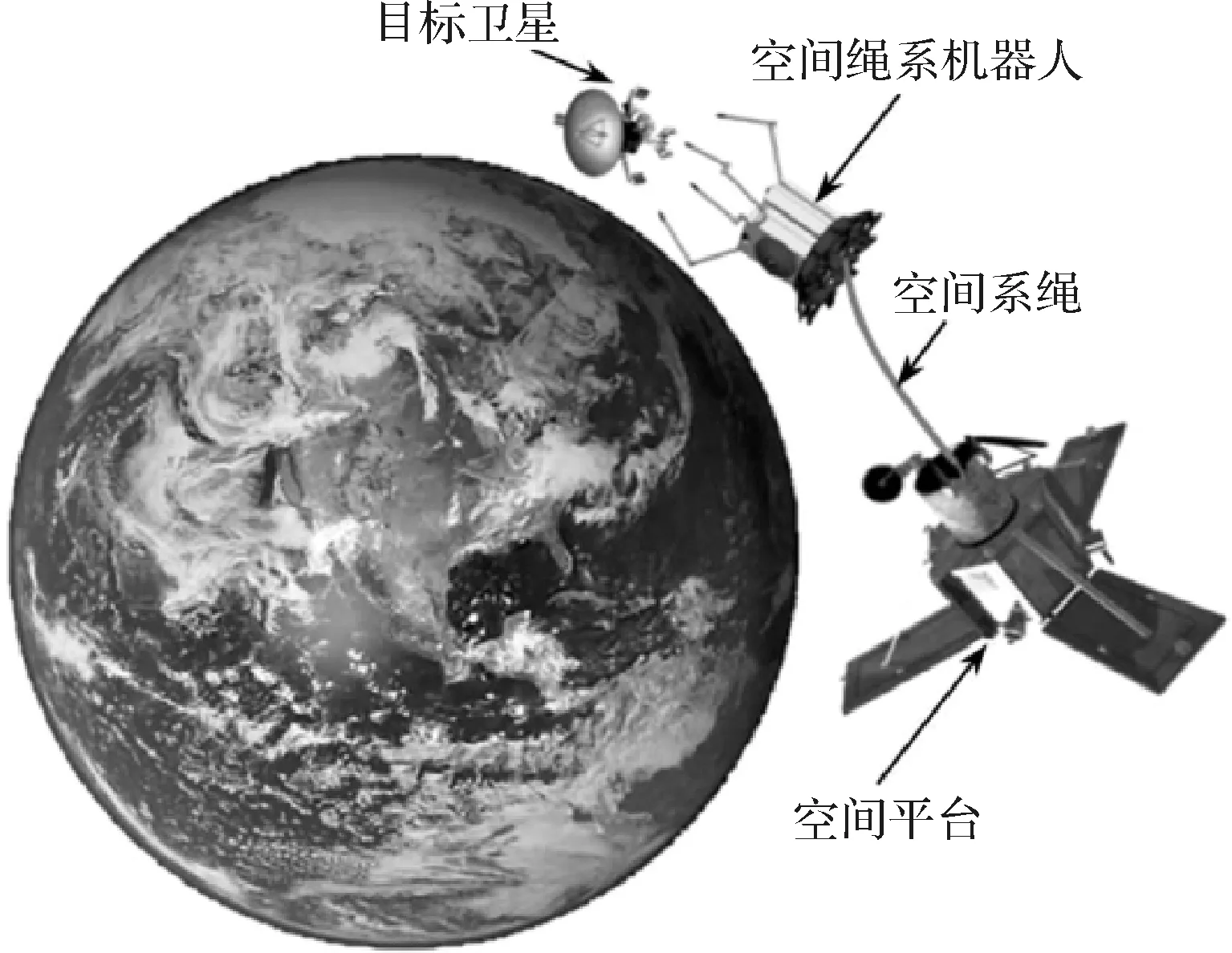
图6 绳爪式空间绳系捕获机器人
1.3 口袋式捕获系统
2012年,美国国家航空航天局NASA (National Aeronautics and Space Administration)提出了小行星捕获ARM项目[13]。项目方案A采用口袋式抓捕方案,发射火箭将ARM航天器发送到407 km的近地轨道后实现分离并将航天器展开,经过2.2年后ARM转移到月球轨道,然后利用太阳能电推进系统和月球引力来脱离地月引力系统,再经1.7年到达目标小行星轨道后,通过柔性捕获布袋(如图7所示)抓捕小行星。为了达到消旋目的,探测器首先将和小行星的旋转速度匹配,利用口袋式捕获系统将其捕获,确保小行星稳固在探测器中,然后利用推进系统将探测器和小行星的组合体整体消旋,最后系统离开小行星轨道返回到月球轨道。
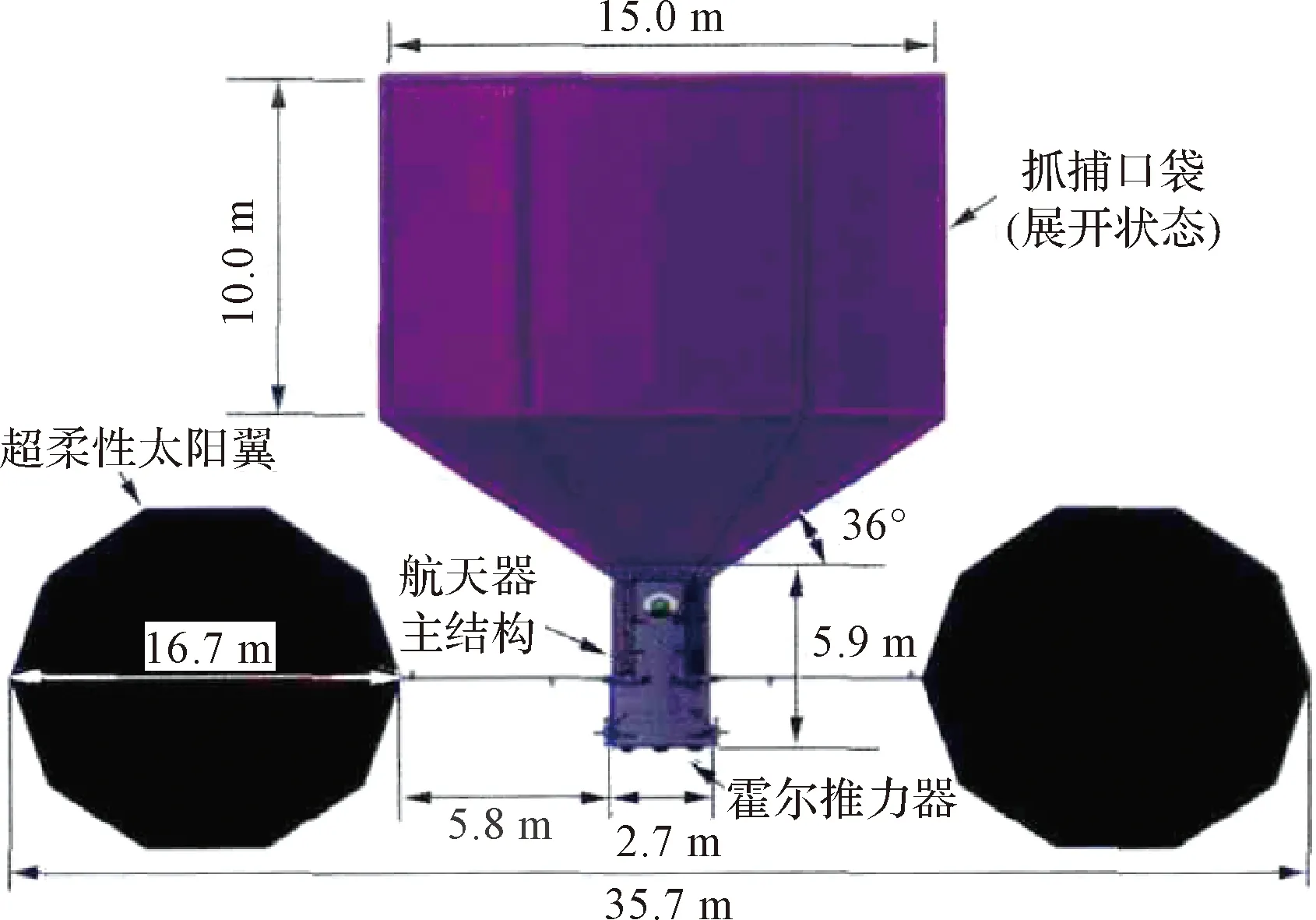
图7 ARM口袋式捕获系统
综上可知,柔性捕获尚处于概念设计、原理验证和少量空间试验验证阶段,在总体方案设计、动力学分析和控制系统设计等方面都存在着复杂的问题需要研究,距离实际工程化应用尚有一段路要走。相比较而言,绳网及绳爪式绳系捕获技术在理论分析、样机研制及空间试验方面都积累了一定的基础,是未来行之有效、可工程实现的柔性捕获方式之一。
2 空间非合作目标物消旋技术
空间非合作目标(失控卫星、空间垃圾等)在空间摄动力作用下大多处于高速旋转状态,旋转轴存在长期章动,对空间非合作目标采取措施实现大幅消旋是非合作目标成功捕获的前提条件。根据消旋力/力矩是否与非合作目标接触,空间非合作目标消旋方法可以分为接触式和非接触式消旋。非接触式采用羽流冲击[32]、静电力[33]、电磁力[34]、激光[35]等非接触力对目标进行消旋可以有效减少碰撞风险,在安全距离外作业消除目标的三轴转速。一般来讲非接触式消旋提供的消旋力/力矩较小,且在轨具体实现难度大,目前多处于概念设计阶段。消旋力/力矩与目标物之间直接接触的接触式消旋,可提供较大的消旋力矩,适用于质量较大目标物的快速消旋,主要包含摩擦力消旋、机械臂控制消旋、柔性系绳消旋、触须粘附式和折叠杆件式等消旋方案。
2001年,日本国家航空航天实验室NAL (National Aerospace Laboratory of Japan)的Kawamoto等[36]提出了利用多次接触式脉冲力交替衰减目标章动角和自旋转速的方法,最终完全衰减了目标物的3轴转动速度,给出了脉冲次数的优化过程。2007年,日本名古屋大学的Yoshikawa和Yamada[37]针对空间机械臂捕获机构,提出了使用机械臂通过接触点对旋转非合作目标物施加脉动推力的方式实现目标物的消旋方案。机械臂控制消旋方式模型相对精确,消旋效率较高,但也存在碰撞风险大,控制较复杂等缺点。
2011年,日本JAXA的Nishida等[30]在研究使用电动力绳系机器人捕获空间非合作目标物时,提出了利用末端执行机构携带的柔性刷,通过控制柔性刷与目标物的摩擦力大小对旋转较快(3~30(°)/s)的目标物进行消旋控制[30]。柔性刷摩擦消旋是一种在抓捕前对目标进行消旋的方法,带来的冲击相对较小,有利于后续的捕获操作。其他诸如半球壳摩擦消旋[38]及利用抓捕机构旋转摩擦转矩消旋[39]等都属于摩擦消旋的方式。但这类消旋方法实施前需要服务航天器进行复杂的变轨绕飞,接近停靠在距目标非常近的位置处。
2012年,美国的Levin等[40]针对电动力绳系飞网捕获系统EDDE,提出了利用绳网与非合作目标物的多牵挂点消旋方法,通过控制牵挂于目标物的两条系绳张力对旋转目标物进行消旋。此种消旋方式对目标物的形状以及绳网与目标物的牵挂点要求较高。
其他还有诸如触须粘附式消旋及折叠杆件消旋等消旋方式,按消旋作业与捕获作业是否同一机构及其作业特点将接触式消旋简单归纳如表1所示。能同时满足消旋+捕获或消旋+离轨的一步式消旋方法更具前景,可以将一个空间碎片主动移除任务多个环节进行简化,减轻任务有效载荷。
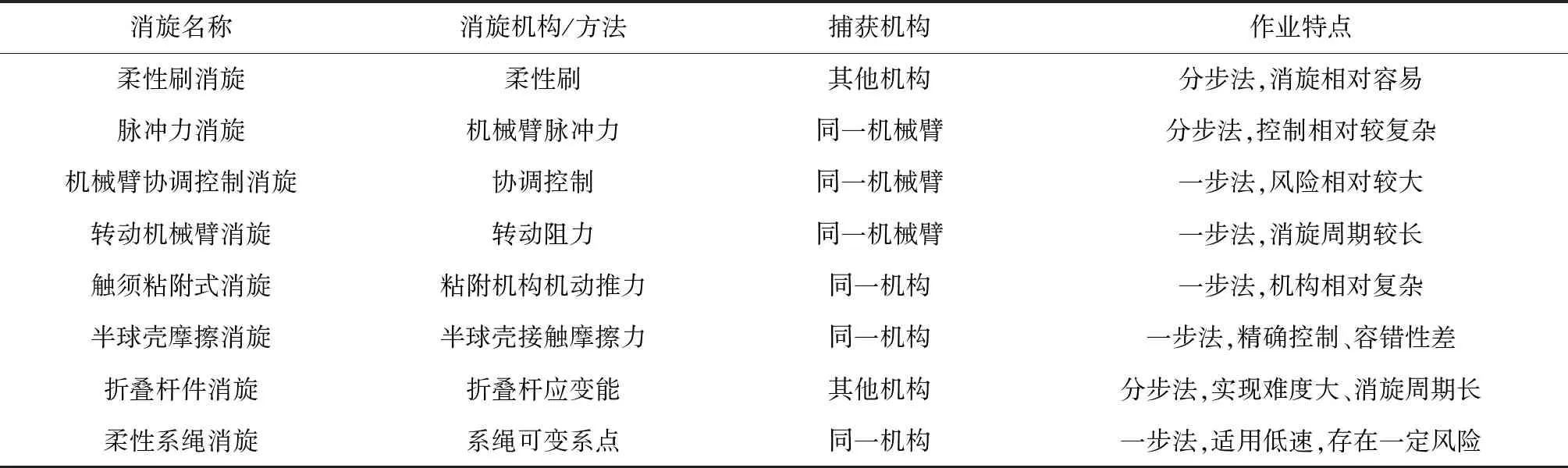
表1 各类接触式消旋方法的特点
3 空间柔性系绳模型及其控制装置
3.1 空间系绳模型
系绳具有重量轻、阻尼小、抗拉强度高、柔软性好、大尺度及易卷取等特征,其在空间具有很大的应用优势。从太空环境的特殊性以及捕获任务出发,对系绳有多方面的要求:强度高、耐高(低)温、质量轻和柔软性好等,常选择综合性能好的芳香族聚胺纤维作为系绳的材料,其典型代表为Kevlar和Taron材料。系绳具有复杂的动力学特性,其动力学特性不仅在微观上与材料本身的分子机构有关,宏观上与系绳的缠绕编制方式等也有很大的关系,一般很难建立能完全表现系绳特性的精确模型。在进行空间系绳系统动力学分析时,一般根据实际情况,采用各种简化的模型对系绳进行描述,已有不少文献对系绳模型进行了总结与比较[41-42]。应用比较多的系绳简化模型一般可分为5种。
1)轻质刚体模型。不计系绳质量,不计系绳弹性,将系绳等效成一根只能受拉而不能受压的一维轻质刚性杆[43-44],当将系绳两端所连接的航天器也作为质点考虑,此时整个绳系系统模型被称之为“哑铃模型”,是空间绳系系统中最简单的模型。此种模型主要专注于系统的质心运动,此时系绳对其连接的两个航天器起着位置约束的作用。这种模型建立的系统方程相对简单,有利于降低控制器设计的难度和提高计算效率,又能描述系统的姿态运动,有利于直观理解空间绳系系统的概念。
2)轻质弹性体模型。不计系绳质量,计入系绳弹性或者系绳弹性与阻尼,将系绳等效成不可压缩弹性杆模型对系绳进行建模[45],并可根据情况考虑系绳阻尼特性[46]。系绳粘弹性材料本构关系通常采用线性KElvin-Voigt模型[47]:

式中:N代表系绳张力大小,E代表系绳弹性模量,A代表系绳横截面积,α表示阻尼系数,ε表示系绳应变。系绳一般由多根复合材料纤维编织而成,当它在受压时,由于各根纤维的抗压能力都非常低,绳索整体只表现出很小的刚度,当它受微小的拉力作用时,由于各根纤维都具有一定的松弛余量,绳索整体的刚度依然非常小;只有当拉力比较大时,绳索中的纤维才会被拉紧,从而表现出非常大的刚度特性,可根据系绳存在的非线性应力—应变特性,可对上述线性Kelvin-Voigt模型加以改进[31]。
系绳本身除了存在非线性弹性特性外,其应力—应变曲线还存在迟滞特性,即纵向拉伸时,加载与减载过程曲线不重合。赵国伟等[48]在研究柔性绳索体展开过程时,为了描述系绳的静态迟滞特性,引入了Kawabata拉伸张力—应变模型。易琳等[49]借鉴用于描述机械、土木、地震和材料工程中的Bouc-Wen迟滞模型,建立了能够灵活控制迟滞环形状的推广Bouc-Wen模型以描述Kevlar系绳高度非对称的迟滞现象,并提出了模型参数分步识别方法。
3)集中质量刚体模型。此种模型将系绳离散成一系列与无质量直杆相连的质点[50]。直杆与质点之间通过活动铰链连接,因此可以自由转动,以此来模拟系绳的柔性,建模时将系绳所受外力集中施加在节点上,根据系绳线密度通过集中质量法确定节点质量。模型中离散单元的数目可变,通过仅改变离系绳收放点最近的单元的属性(如长度、质量),并于适当的时候(当最前端单元的长度超过或低于预先给定的阀值时)在离散单元链的最前端加入或移除一个单元来模拟系绳的收放过程。
4)集中质量弹性体模型。此种模型在实际应用中最为广泛,既考虑了系绳质量又考虑了系绳弹性,能相对比较全面的表现系绳特性且模型不复杂,方便编程计算与仿真。应用比较多的是将系绳离散成一系列与弹簧、阻尼相连接的质点,系绳所受其他外力都作用在各质点上[51]。根据实际情况也可不考虑系绳阻尼,即将系绳离散成一系列与弹簧相连接的质点[52]。
5)连续弹性体模型。考虑系绳位形与连续质量,一般是利用微元法,取系绳微元进行分析[53-55],其中以Modi与Misra[53]所提出的模型最具代表意义。该模型考虑了系绳质量、空间位形以及系绳与末端的连接点的偏置问题,所得的模型代数/偏微分方程相当复杂,基本无法求出其解,只能通过数值计算进行研究。
上述系绳等效模型是研究者针对不同的研究背景及不同的侧重点对空间系绳所抽象出的等效特征。在空间绳系系统研究的早期,研究的重点是凸显空间绳系系统的基本物理现象和物理规律,进行了大量的假设,一般将系绳等效成刚性杆(模型1),这样的假设有利于快速对空间绳系系统构成基本的认识。在基本的物理现象得到阐述与认识之后,研究的重点转移到系统更为精细的物理现象,如系统的纵向振动等,此时一般需要将系绳弹性考虑进去,将系绳等效为无质量的弹性杆(模型2)。当系绳本身质量较大时,还会引起空间绳系系统的横向振动及跳绳运动等,这时系绳分布质量特性必须要考虑到模型中去,将系绳离散成细小的系绳单元,系绳单元的质量被考虑为质点,整个系绳被等效成由刚性杆连接的质点(模型3)或者由弹簧、阻尼连接的质点(模型4)。而利用微元法,考虑系绳位形和质量(模型5),建立的系统模型则将更加精细。针对不同的研究背景可以根据实际情况对系绳模型进行选择与改进。初步试验发现,Kevlar系绳存在着诸如刚度非线性、塑性变形、蠕变以及迟滞效应等非线性特性,详细研究系绳的此类非线性现象并将其考虑到系绳模型中对绳系组合体的动力学分析及控制系统设计具有重大意义。
3.2 系绳控制装置
3.2.1系绳长度控制
主要进行系绳长度或速率控制,对系绳张力没有要求,这类系绳控制机构相对简单,一般使用动力部件驱动卷筒即可实现功能要求。
南京航空航天大学的文浩[56]在基于气浮装置的绳系卫星地面模拟实验中设计了一种简单的系绳卷取机构,主要包括基座、卷线轴、电机(集成编码器)和电机驱动器,可实现短距离的绳长控制。此机构具有一定的扩展性,可通过在出绳口处加装张力传感器实现系绳的张力闭环控制。由于是用于地面气浮平台实验,因此此机构卷取的系绳长度有限。
在前述ROGER绳网捕获及其他类似的绳网捕获装置中,在绳网与目标物完成交会、接触后需要通过收口机构卷取收口绳将网口收拢、锁死而完成任务平台与目标物的可靠连接。ROGER项目中的电收口机构主要由驱动电机、卷绳筒、供电电池和微开关等组成,当绳网捕获到目标物后,传感器触发开关,通过驱动电机带动卷绳筒旋转实现系绳的可控卷取。ROGER的最大绳网尺寸为15 m×15 m,此种情况下收口绳总长为60 m左右,因此此收口机构是一种短距离系绳收放机构,并具有控制灵活、便于实现自主触发关停、测距和遥控等智能操作[11]。国防科技大学的陈钦[57]提出了使用弹簧储能的机械式绳网收口机构,机构中有机械式锁死机构,使得系绳卷入收口机构中就不能被拉出,即只能单向回收。此机械式收口机构结构简单、成本低,但因储能少而不利于长距离卷取,也不利于重复使用。浙江大学的易琳等[58]针对绳网收口,设计了电驱动式的自适应收口质量块,此机构借鉴了双转子电机结构的思路,即定子和转子都自由转动,可分别带动两卷筒对两根系绳进行卷取。当两根收口绳长度不一样时,收口质量块也能完成收口任务,具有较强的自适应功能。
3.2.2系绳张力控制机构
此类机构一般在进行系绳卷取的同时还要进行系绳张力控制。张力控制可采用张力传感器实时检测系绳张力,通过控制驱动电机对张力进行闭环控制,也可以通过单独的张力控制模块对系绳张力进行控制。
日本东京工业大学的Mori等[59]在研究使用绳系卫星编队飞行展开薄膜时,提出了一种系绳张力闭环控制机构。该机构用两个电机分别控制机构内部和外部的系绳张力,机构还采用了3个张力传感器以测量不同系绳段上的张力,如图8所示。卷筒上安装有排线装置,可以使得系绳在卷筒上均匀排布,排线装置的动力由固连在卷筒上的皮带轮通过皮带提供。
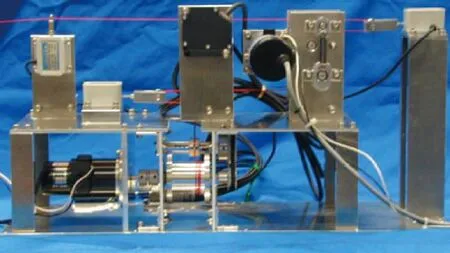
图8 东京工业大学研制的张力控制机构
美国麻省理工大学的Chung等[60]针对NASA宇宙演化的亚毫米探测结构任务,改进了前述用来探测宇宙早期亚毫米波长电磁波的绳系干涉仪航天器SPHERES,加装了如图9所示的系绳张力控制机构。此系绳控制机构主要包括超声发射器、导绳环、6自由度力传感器、导线轮、传动主轴、驱动电机和卷绳筒等组件。驱动电机控制系绳卷取,超声波收发器完成航天器相对位置测量,6自由度张力传感器既能够测量系绳张力的大小,又能根据系绳张力在各坐标轴上的分量计算出系绳姿态入角[60],实现了系绳姿态入角的无接触式测量。
浙江大学的王班等[61]提出了一种多功能、高效能的张力控制机构。通过论证空间绳系组合体可能存在的多种运动现象,对机构提出了系绳姿态角、绳长及张力等方面的功能需求,据此研制了如图10所示的张力控制机构样机,并分析讨论了张力控制机构的张力跟踪等各类静、动态性能。
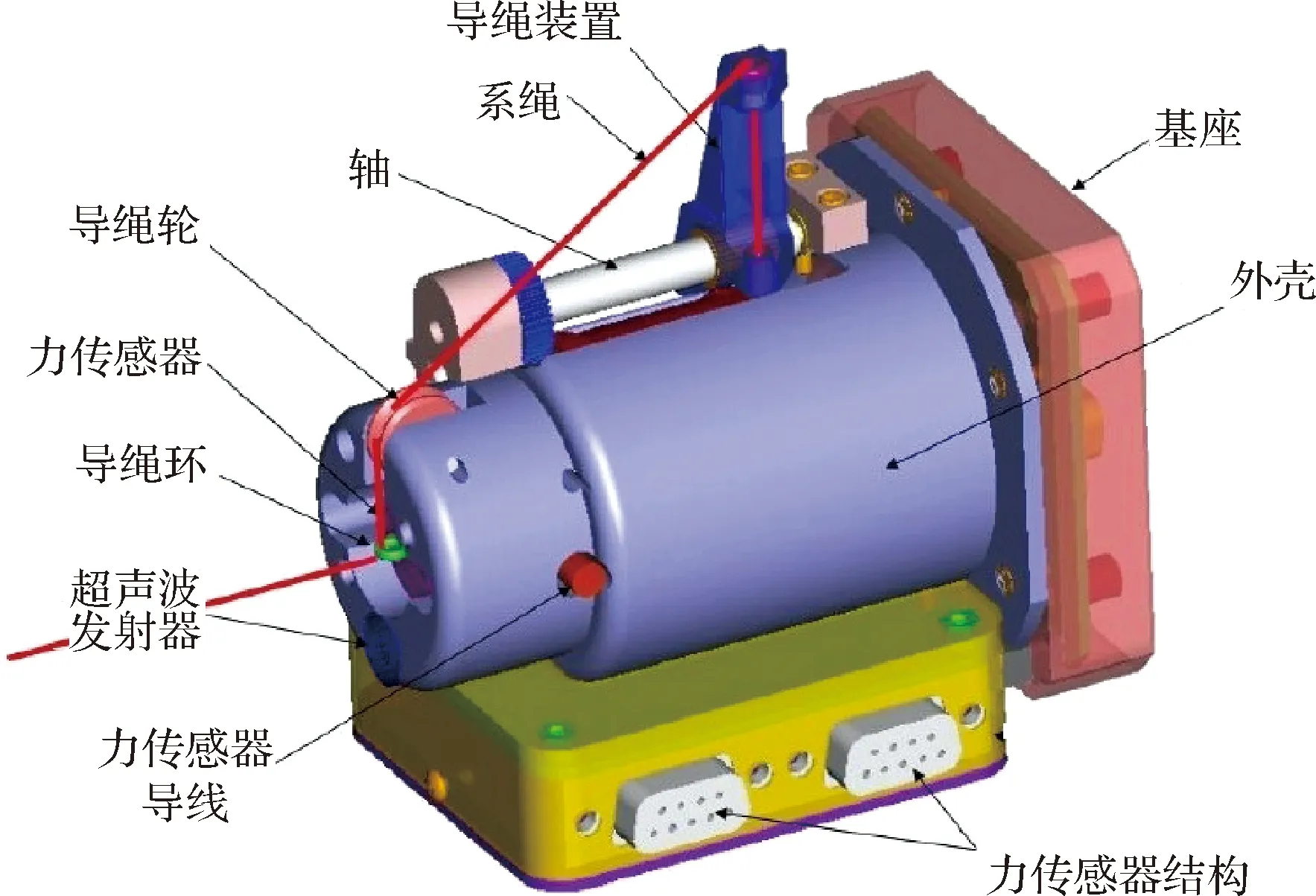
图9 麻省理工大学研制的张力控制机构
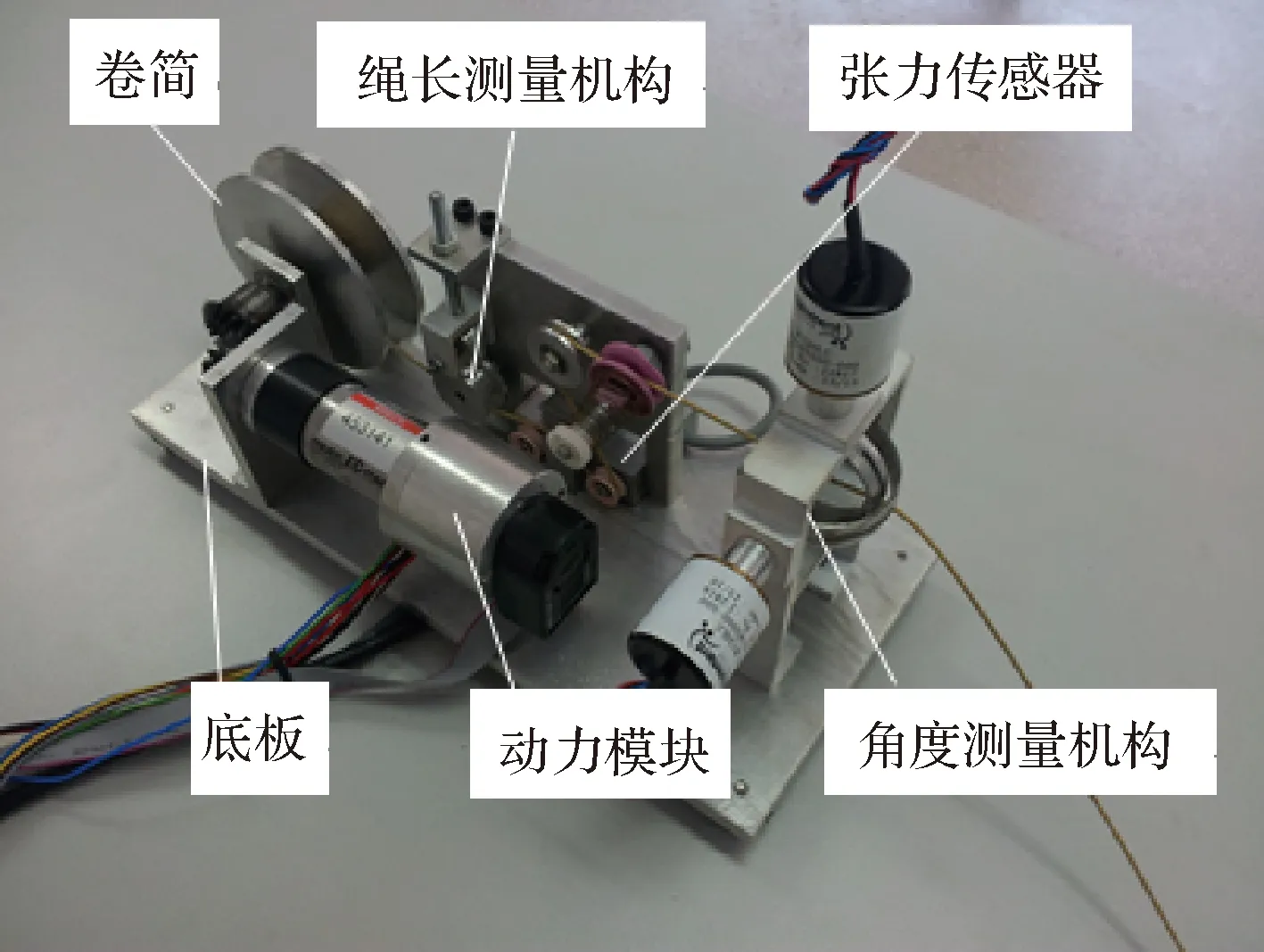
图10 浙江大学研制的张力控制机构
前述几种空间系绳张力控制机构都是通过控制卷绕电机实现张力闭环控制的,也可通过独立的张力控制模块对张力实现单独控制,比较常用的是“螺旋轴”张力控制方式,通过调节系绳释放时的摩擦力来实现系绳张力的单独控制。在轨绳系卫星项目如YES系列项目及SEDS系列项目等都采取了这种“螺旋轴”方式实现系绳张力控制。以YES-2项目中的系绳释放机构为例[62],其原理如图11所示,系绳从储绳筒出来后,螺旋缠绕于一轴上,此轴由伺服电机驱动,伺服电机配合蜗轮蜗杆带动旋转轴旋转可改变系绳绕在轴上的圈数从而改变系绳张力。
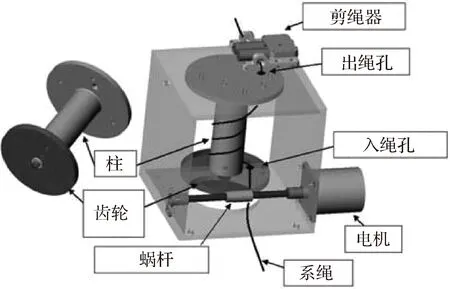
图11 螺旋轴式张力控制机构
系绳控制机构作为空间绳系系统系绳控制的重要执行机构,其性能好坏对空间绳系系统的成败有重大影响。结合前面的分析以及使用要求,未来在设计、研制针对空间一般性场合的系绳控制机构时在排线机构设计及先进控制策略应用方面需重点关注。
4 结 论
对比分析几种空间柔性捕获技术可知,针对绳网及绳爪式绳系捕获技术,国内外在理论分析、样机研制及空间试验方面都积累了一定的基础,是未来行之有效、可工程实现的柔性捕获方式之一,是在轨捕获技术未来发展的一个新方向。针对空间绳系捕获技术,以下几个关键技术需要重点解决。
1)捕获前的目标物各类参数识别技术
在非合作目标物捕获及控制任务过程中,由于目标惯性参数未知,因此需要辨识其质量等惯性参数,以实现精确控制。为了使姿态轨道控制系统做出精准的控制策略,保证航天器正常在轨运行,需要首先对所抓捕的空间非合作目标的惯性参数进行快速准确辨识。目标的运行状态、目标的表面材料、分离目标本体和帆板的信号、目标的姿态信息等都需要在捕获前加以识别。
2)空间绳系捕获系统大尺度系绳精确建模
空间系绳(如Kevlar系绳等)自身具有粘弹性、塑性变形等非线性特性,且当系绳较长(大尺度)时,还会呈现变阻尼和迟滞特性等,其特性如何描述和识别,空间绳系组合体如何活用此特性进行防冲击、翻滚等,都是亟待解决的问题。
3)捕获后的空间柔性组合体稳定控制策略
空间绳系组合体的冲击、摆动及旋转等运动形式是相互耦合的,一种运动的抑制可能激发其他类运动。另一方面,要兼顾几类运动的有效抑制,使组合体稳定控制过程的拖曳策略具有容错性、自适应性和安全性。
4)地面试验验证技术
对空间绳系捕获系统进行地面仿真试验,可以校验理论结果是否正确,有利于在进行在轨试验前发现问题。但空间环境较为复杂,除失重、真空环境外,还需要考虑大气阻力、太阳光压、日月引力等摄动的影响。因此,有必要搭建能够真实反映空间动力学环境的地面试验验证平台,进而开展地面仿真校验试验,为进一步的空间在轨试验奠定基础。
