高焓激波风洞自由活塞速度测量系统
2020-03-11孙日明谌君谋陈星
孙日明,谌君谋,陈星
中国航天空气动力技术研究院,北京100074
FD21风洞是目前世界上领先的自由活塞驱动高焓激波风洞。它通过两级压缩,获得高温、高压的试验气体,兼具高焓和长时间等组合状态的多种风洞运行模式,模拟能力在国内首屈一指[1-4]。该风洞的核心是重活塞压缩器,通过活塞运动将预先充于压缩管中的氦气/氩气等驱动气体压缩至高温高压状态。风洞运行参数的设定直接影响着自由活塞的运动:参数设置过高会影响风洞运行安全;参数设置过低又无法获得需要的流场参数。而风洞运行参数的设定不能只靠理论计算,必须在调试过程中安全准确地获取活塞运行规律,进而对理论计算结果进行修正,同时为风洞运行安全提供保障。
自由活塞运行速度较快,可达数百米每秒,属于高速运动的范畴。国内外对于高速运动物体的速度测量可分为直接测量和间接测量2种方式[5]。直接测量方法通过测量物理定律中某个与速度直接相关的参数的变化来得到物体的运动速度。例如在火炮初速测量等领域应用较为广泛的激光多普勒测速雷达。间接测量将对速度的测量转化为对运动物体位移和时间的测量。某个足够小的时间段内运动的平均速度v=s/t,可以认为该平均速度就是此时的瞬时速度。如文献[6-7]中所述日本HIEST 风洞活塞测速即采用平均速度法,但其方案只能获取单点速度信息,无法获取末端运行规律。
在风洞活塞调试过程中,经过不断摸索与试验,本文设计了一种多传感器融合的活塞速度监测系统,为风洞运行调试提供了有力支撑。
1 活塞测速原理
1.1 多普勒效应法
直接测量法以多普勒效应为理论依据,应用较多的为激光多普勒测速雷达。测速仪通过激光器发出频率为f的激光束,因为多普勒效应的作用,经过运动物体反射的激光光束频率被速度v调制,变为f+Δf。通过测量Δf就可以得到运动物体的速度v。多普勒测速法具有响应速度快、测量精度高、测量动态范围宽、可测多维矢量速度等优点[8],在火炮出口速度测量等场合应用广泛[9-10]。但其成本高、器件易损坏,且不适合于有大量振动的工业环境,因此本文不采用该方式进行测量。
1.2 间接测量法
间接测量是将对速度的测量转化为对运动物体位移和时间的测量。按照测量量的不同,可分为以下2种方法。
1)信号切断法
如图1所示,该方法在物体运行的垂直方向布置2个测点,测点间的距离S1已知。当物体运动到测点位置时,该测点信号发生变化(如光束被遮挡、压力信号发生变化、磁通量发生变化等),通过记录2个测点之间的信号变化时间差t1,即可通过公式v1=S1/t1获取该段的平均速度。与此类似,如果物体本身具有一定长度L,也可记录单个测点信号发生变化的时间间隔t2,获取物体通过该测点的平均速度v2=L/t2。

图1 信号切断法示意
信号切断法适用于形状规则的物体速度测量,可以达到较高的测量精度[11-12]。但该方法依赖于信号的捕获,如果测量环境有烟雾、粉尘、电磁干扰等,需进行相应的处理以达到较好的测量结果。
2)位置捕获法
如图2所示,在理想情况下,能够获取活塞在管道中的实时位置S,即可通过对位置S进行微分,获取速度曲线。

图2 位置捕获法示意
该方法由于测量元件大小及响应频率的限制,一般只能获取较短距离的活塞运动轨迹,而无法监测几十米范围内的活塞运动。而且由于管道内的瞬时高温高压环境及烟雾影响,必须对传感器进行相应防护处理。
2 测速系统搭建
综合考虑高能激波风洞的运行特点及管道情况,充分利用前期管道设计时遗留的测压孔,采用信号切断法与位置获取法共同进行活塞运行速度监测。
2.1 活塞外形分析
如图3所示,某次测量选用的活塞从右至左有3个凸起结构:摩擦环、聚四氟1和聚四氟2。此种外形可在垂直运动方向放置光纤传感器进行信号切断法测量。
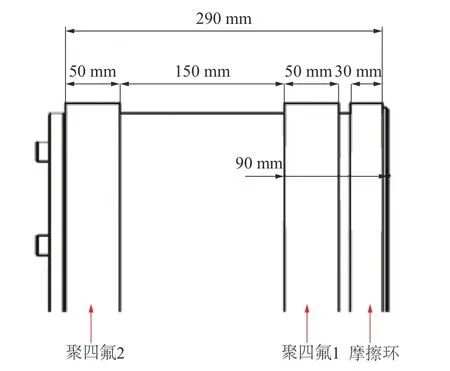
图3 活塞真实结构
为增强活塞通过的信号对比度,试验前将3段凸起结构进行清洁处理,并将凹陷结构进行涂黑。在试验前先拉动活塞通过各测点,调整传感器安装高度并获取其通过阈值。
活塞左侧端面为密闭结构,可在运行末端放置经过结构防护的激光传感器进行位置捕获,获取其末端运行情况。试验前同样在该装置安装完毕后进行标定,以获取真实信息。
2.2 测点布置
如图4所示,在活塞压缩管处上方布置若干光纤传感器G1,G2,…,Gn,其距离发射机构的距离相应为X1,X2,…,Xn(型号为FU-63,放大器为FS-N11C),采用信号切断法进行速度获取。由于光纤传感器的信号易受烟雾、粉尘等影响产生干扰,因此在光纤传感器的对应位置设置了压力传感器(P1,P2,…,Pn)进行相互印证并监测管道内压力变化。

图4 各类传感器测点布置
在最右侧活塞止停机构位置安置了一台日本基恩士公司LR-TB5000型激光测距仪进行位置捕获,经过加装保护观察窗标定后,该型仪器有效检测距离为5 000 mm。该传感器测量的位置信息既可以计算活塞运行速度与光纤传感器进行互相印证,又以判断活塞的具体反弹位置。
2.3 同步采集系统搭建
如图5所示,同步采集系统由风洞现场设备和测控间设备2部分组成。风洞现场设备将光纤传感器信号、压力传感器信号及激光测距仪信号引入LXI-5402同步采集器(采样率100 kS/s,精度16 bit)。
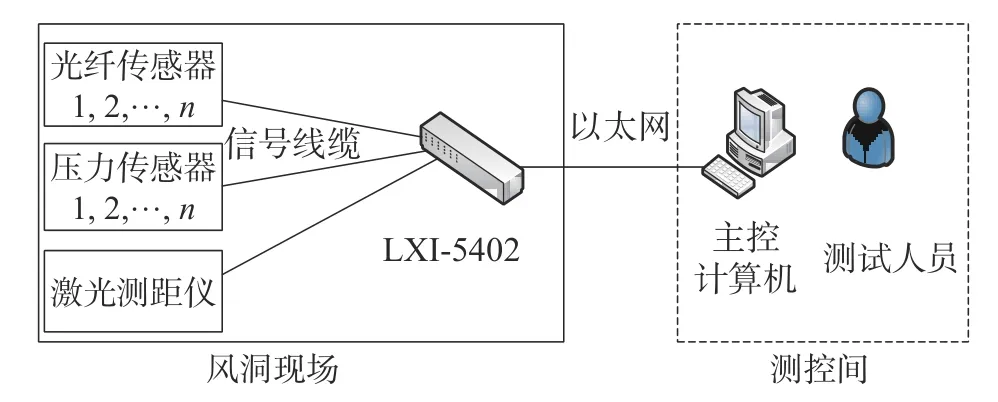
图5 同步采集系统示意
测控间内的测试人员通过主控计算机采用远程访问的方式控制LXI-5402。系统采用激波风洞中成熟的触发采集方式,即当活塞运行后导致压力传感器P1有阶跃信号产生后,系统自动采集1 s,并将所有通道信号上传至主控计算机保存。
3 测试试验及结果分析
3.1 测试试验设计
按照第2章所述搭建活塞测速系统,按照图4进行传感器布置,在高焓激波风洞进行测试试验。将压缩管末端密封,则活塞发射后先加速,在压缩管末端附近达到最高速度,随后速度减少至零并反向加速。
试验设计条件中,理论计算活塞运动最大运动速度约为200 m/s,且距离压缩管末端2.2 m 处反弹。
3.2 光纤传感器点测量
3.2.1光纤传感器信号定性分析
为了能够更加精确地测量活塞速度(分辨出更多的活塞结构),通过事先设置阈值,使得测量数据能够分辨出活塞的结构。如图6所示,即为该次试验中光电传感器G14记录的活塞通过过程。从图中可以明显看出通过过程中有3段高电平,即从左至右为摩擦环、聚四氟1、聚四氟2。因此,从定性的角度可以确认该方法能够测量活塞通过过程。

图6 光纤传感器测速结果
3.2.2光纤传感器信号定量分析
通过图3所示活塞结构及图6中的光电信号对比即可得出活塞通过的平均速度。由摩擦环起始位置至聚四氟2起始位置的平均速度为182.3 m/s,由摩擦环起始位置至聚四氟2结束位置的平均速度为187.6 m/s,二者间误差小于3%。经分析认为,由于光纤传感器光斑直径为2 mm 左右,且活塞凸起部分有一定倒角,会在过渡段引入一定误差,因而取活塞整个结构平均速度较为合适,其余结构可作为该测量方式的合理参照。
因此,判定该次试验G14测点测得的活塞速度为182.3 m/s。依此类推,可获取所布置的8个光纤传感器测点的速度值。
3.3 激光测距传感器连续测量
3.3.1测距传感器信号定性分析
如图7所示为激光传感器的位置测试结果。可知活塞在距激光传感器约2.2 m 位置发生反弹,并未撞击到止停机构,证明激光传感器获取的数据真实有效,可以此为根据进行速度换算。
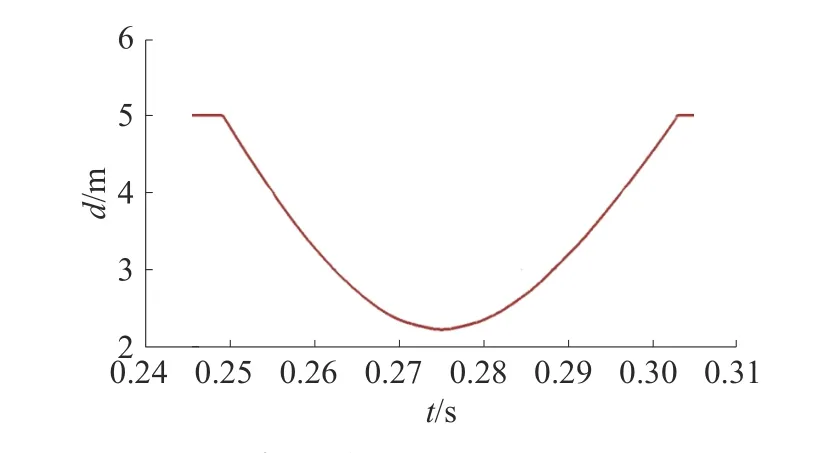
图7 激光传感器位置测量结果
3.3.2测距传感器信号定量分析
测距传感器的采样频率为100 kHz,输出量程为0~10 V,对应距离为0~5 m。对图7所获取的位置数据进行微分后如图8所示,活塞在监测范围内处于不断减速过程,从最高的175 m/s逐渐减速至0,然后反向加速至157 m/s并脱离监测区域。

图8 激光传感器测得速度结果
3.4 多传感器信息融合定性分析
图9为该次试验获取的活塞运行结果。由于采用了多通道同步采集,因此各信号输出间的相对时刻是准确的,可以进行对比分析。

图9 压力传感器、光纤传感器与激光测距传感器信息融合
弧形曲线为末端激光测距传感器的信号输出,其安装在止停机构上。可以看出活塞与激光测距装置的距离由远变近,在曲线最低点处发生反弹,活塞渐渐远离。弧形曲线最低点位置约为2.2 m。
波浪形曲线为G14光纤传感器对应位置布置的压力传感器P14的输出信号。可以看出活塞通过后压力值变小,在反弹后压力上升。由此可确认光电信号有效,并非干扰(实际试验过程中,存在烟雾、粉尘等原因导致的光电信号跳动,可依照压力传感器信号进行排除修正)。
矩形曲线为G14光纤传感器的信号输出,其不但检测到活塞运行与反弹的时刻,还与激光测距传感器的有效工作范围一致,因此可以通过二者计算的活塞速度进行相互印证。
3.5 活塞运行规律获取定量计算
表1为点测量和连续测量速度计算值对比情况。由表1可以看出,光纤传感器与激光传测距感器测得速度较为接近,最大误差小于3%。由此可以判定该测量方法准确可靠,能够反映活塞运行情况。

表1 点测量和连续测量速度计算值对比
如图10所示,计算所有光纤传感器测点速度数据,对比测得的活塞运行位置与经由激光测距传感器测得的活塞位置时刻基本吻合,表明该测试系统对活塞运行情况的监测取得成功,该系统对活塞速度和位置的测量结果可信。
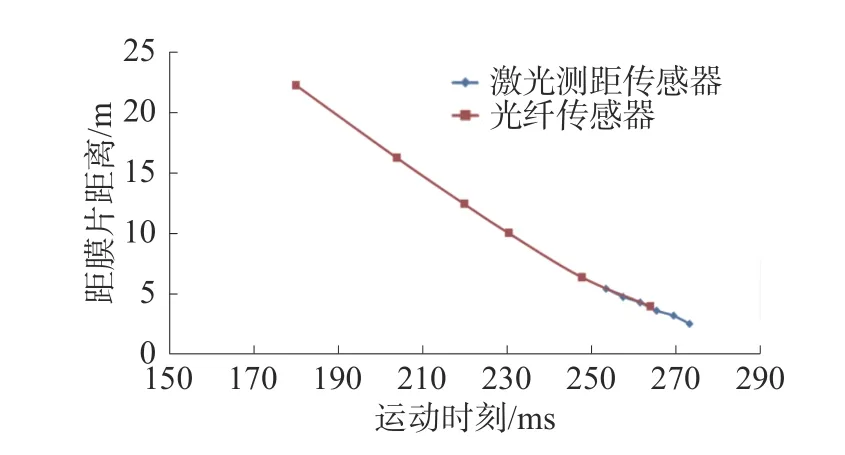
图10 光纤传感器与激光测距传感器位置对比结果
因此,图10即可作为该次活塞运行规律供试验理论计算进行修正。
4 结论
对于风洞自由活塞速度获取的问题,目前普遍采用单一传感器信息获取的方法,数据获取数量少且易有坏点,不能满足高焓激波风洞调试的需要。本文设计并完成了一套多传感器信息融合的速度监测系统,实际速度测量误差小于3%。结论如下:
1)采用光纤传感器,能较为准确地获取活塞运行单点平均速度,但测点稀疏且易受环境干扰,导致数据错误;
2)采用压力传感器测速并与光纤传感器相互印证,可有效排除传感器故障导致的测试问题;
3)激光测距传感器的引入丰富了活塞末端运行位置及速度信息,并可与光纤传感器结果对比,测速误差小于3%。
4)该系统不但适用于高焓激波风洞的活塞速度获取,还应用于中国航天空气动力技术研究院的FD20A 等风洞,取得了良好的应用效果。
由于风洞运行过程中会产生瞬时高温高压,传感器会面临运行一定时间后发生损坏的风险,进而导致数据获取错误。因此,在后续工作中可以加大对传感器密封防护等方面的研究。
