服务于DMCⅢ航摄数据后处理的软件研发
2020-03-11宋宏涛
梁 娇 尹 源 宋宏涛 张 杰
(1.山东华峰地理信息科技有限公司,山东 济南 250102; 2.山东省国土测绘院,山东 济南 250102)
0 引言
在当前日新月异的发展热潮中,由稳定、成熟的航空摄影测量技术获取的基础地理信息数据对于城市建设、交通、水利、农林等各领域都发挥着重要的作用[1-4]。瑞士Leica公司生产的系列产品,特别是框幅式数码航摄仪DMCⅢ(Digital Mapping Camera Ⅲ,DMCⅢ)因其大幅面、高质量、高精度的特点[5],被业内如山东省国土测绘院、天津市测绘院、西安煤航等多家企事业单位引进并投入生产。然而在实际生产尤其是航摄数据后处理中,发现仍有部分问题制约着该设备朝更高自动化的方向发展,如何对其进行优化或完善是值得深入研究的课题。
1 DMCⅢ简介
1.1 作业流程
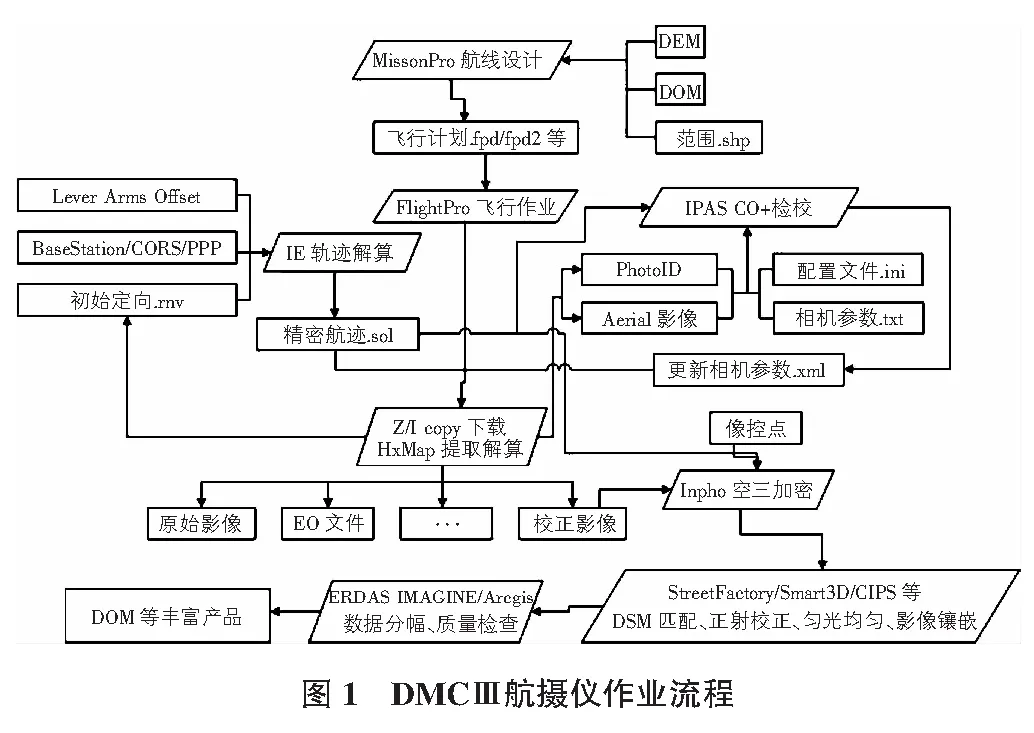
DMCⅢ主要由能够获取全色、红、绿、蓝及近红外多波段数据的多镜头,存储单元MM30、自适应高精度陀螺仪稳定平台PAV100,嵌入的紧耦合处理系统Novatel SPAN GNSS/IMU,操作员控制器OC60,导航屏PD60,电源分配盒PDB等部件组成。设备焦距为92 mm,像元大小3.9 μm,影像幅面达到26 112像元×15 000像元,具有影像质量高、产品丰富、作业效率高等特点。根据徕卡测量系统贸易(北京)有限公司的指导资料及多年生产经验,概述其作业流程如图1所示。
1.2 存在的问题
经过多年的航飞作业及相关数据的后处理经验积淀,我们发现该设备的集成化程度相对较高,从航线的设计到航飞作业,再到POS解算、RGB及RGBN影像的生产,各工序之间衔接自如,人工参与较少、自动化程度高。但同时也发现,在实际作业中,一些相关的操作如飞行结束后航飞曝光点文件EOP的快速处理、布设像控点时导航点坐标的自动提取、数据整理时大量文件的规则命名以及多架次飞行中影像文件的整合及拆分等等,这些问题潜在地制约着DMCⅢ朝更高的自动化程度方向发展,产生不可避免的时间及人力上的成本。如何对其进行合理解决或提供更科学的优化方案,变得迫在眉睫。
2 软件功能设计及实现
2.1 功能设计
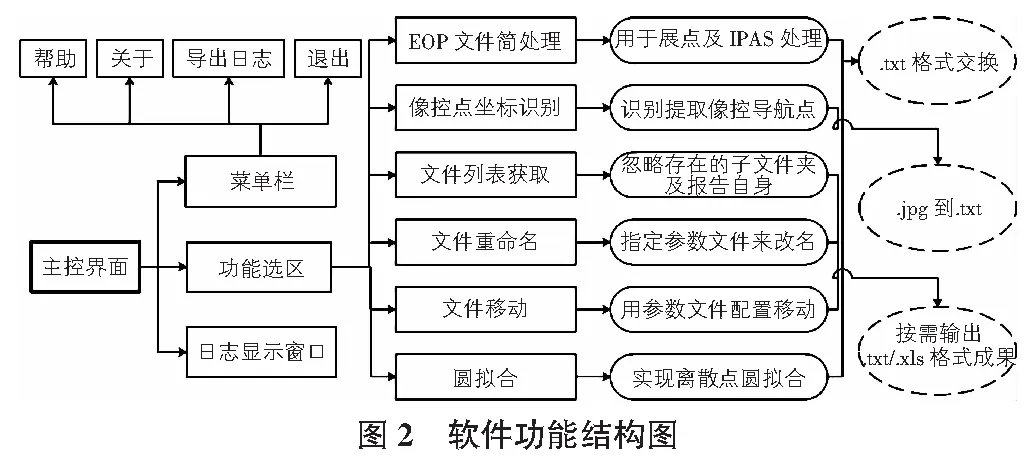
经分析,最终确定该款DMCⅢ_Tools软件主要服务于DMCⅢ航摄仪的数据后处理生产作业。具体地,主要包括EOP文件简处理、像控点坐标识别、文件列表获取、文件重命名、文件移动、二维圆拟合、三维圆拟合几项功能,软件的结构如图2所示。在后续将对每个功能进行介绍。
2.2 关键核心技术
1)EOP文件简处理。
DMCⅢ作业时,相机每一次的曝光都会将航线编号、瞬时的曝光点名及位置、设备三个方向姿态角、时间等信息记录于特定文件,这对于航飞结束后从快速甄别是否漏片、计算航线偏移区间等方面来评价航摄数据质量具有重要价值。由于该文件包含数据繁多,后处理时常需人工摘取部分感兴趣信息,多架次飞行时该工作具有重复性、不利于自动化。为此,设计的EOP文件简处理功能主要用于自动从航摄结束后生成的包含曝光点信息等的文件中按需提取GPS时间、曝光点坐标以及自定义处理后的曝光点名字,直接供Arcgis展点分析以节省时间开销。
2)像控点坐标识别。
DMCⅢ航摄数据获取并经预处理后,像控点的布设一般均借助HxMap平台进行,人工选定的像控点及其坐标(用于后续导航至实地采集)无法直接导出,常历经“图像—数字”的转换且这一过程由人工肉眼识别并手动录入来完成,效率低下(约3张/min)且精度无法保证。该像控点坐标识别功能就是利用图像匹配及文字识别技术从包含像控点的图像中提取出唯一坐标值并按固定格式输出至相应文件,且该功能具备批处理的能力,流程如图3所示。
3)文件列表获取。
文件列表获取主要服务于DMCⅢ航摄数据后期的整理工作,用于快速获取指定文件夹下的文件列表,该功能结合实际,忽略指定路径下存在的文件夹及输出的文件本身。
4)文件移动。
按国家规范,航摄结束后的资料整理工作往往需按分区进行,而由于空中补飞等原因,各架次与分区的对应关系并不十分严格,且因航摄数据都较大,每一次移动前的备份操作都会造成较大的时间开销和存储空间开销,所以在资料整理时常会不可避免的发生文件整理上的混淆。因此设计的文件移动功能主要用于以给定的参数文件来完成文件的移动操作,批量实现多架次数据的拆分整合,同时,该功能在日常文件的挑选中也可广泛应用。重要的是该功能在运行时支持执行报告的输出,移动的文件和未移动的文件都形成记录,这就为后期数据误操作溯源恢复提供了依据。
5)文件重命名。
和文件移动功能类似,文件重命名功能主要用于以参数文件的形式来重命名指定的文件,采用过程式、可逆式的方法,将每一次改名操作都形成记录,这在海量文件名称规则处理的时候尤其具备优势。
6)圆拟合。
在工程测量中,尤其是在工业、基建工程中,规则的建筑物几何参数常由图像匹配、全站仪或三维激光扫描仪获取的密集点云来反算求得。设计的二维圆拟合及三维圆拟合即用于实现空间点坐标(二维及三维)的最小二乘圆拟合,返回结果包含拟合的圆心坐标及圆半径,以及拟合点位中误差、各点到拟合圆偏差值等信息。同时,该功能支持拟合情况的实时显示。
3 开发与测试
3.1 软件界面
根据实际需求,最终利用MATLAB语言编写完成了该DMCⅢ_Tools软件,软件界面如图4所示。
其中,菜单栏主要实现软件信息相关信息显示以及工作日志的导出;要执行的功能通过功能选区的弹出式菜单来选择,右侧的灰色按钮根据选定功能的有效性来判定激活;最下方的日志显示窗口则实时的记录用户的每一次操作且支持随时导出,依此增强交互体验,这也为追溯由某些潜在的、不确定因素产生的问题提供了可能。

3.2 软件核心代码
为了更好的与业内技术人员交流分享,这里给出该款软件的核心函数(代码),整理于表1中。

表1 软件涉及核心函数
3.3 运行测试
在实际应用中发现,软件结构紧凑,整体界面小巧且操作简单,下方的日志显示窗口带来较佳的用户体验。设计并实现的EOP文件简处理、文件列表获取、文件移动、文件重命名几项功能均运行稳定,完全满足了实际需求;但软件中的圆拟合功能由于算法的原因,整体抗差性不强,有待进一步改进;而具备的像控点坐标识别功能则表现亮眼,在近90张的像控图像中,程序总耗时约74 s,而依靠人工则需约30 min,极大的提升了DMCⅢ航摄像控点的生产效率。总的来看,该软件有较强的针对性,可以很好的服务于DMCⅢ航摄数据的后处理作业,益于推进相关流程的自动化。
4 结语
DMCⅢ航摄仪相对成熟稳定,其应用领域广且拥有较多的用户群体,在诸多框幅式相机中具有明显优势。针对其研发的该软件系统,能够服务于DMCⅢ航摄数据的后处理作业,具有较强的应用价值,同时对于相关的航摄工作也具有一定参考意义。下一步将继续从航摄数据的后处理入手,深入研究瓶颈问题,以期获得更加便捷、更加完善的处理方式。
