耦合发生概率不确定的复杂网络传感器故障估计
2020-03-11
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
复杂网络可以描述真实世界的许多复杂系统,在现实生活中如互联网、生物网、社交网都可以用复杂网络来表示,因此,对复杂网络的研究具有重要的现实意义。由于网络之间错综复杂的耦合关系,一个节点发生变化可能导致其他节点随之变化。复杂网络节点之间存在多种耦合关系,如文献[1-2]对耦合矩阵为常值矩阵的复杂网络进行研究,文献[3-4]研究了具有状态延迟耦合形式的复杂网络模型,文献[5-6]讨论当耦合配置矩阵为时变矩阵时的复杂网络同步控制问题,文献[7]采用一组随机变量描述节点之间的耦合现象。目前关于复杂网络的研究已经取得了大量的成果,但是针对耦合矩阵或耦合规律已知的情况较多,对于耦合发生概率不确定的复杂网络研究还不完善。然而,现实中许多复杂网络的节点之间是否发生耦合现象是随机的,并且耦合发生的概率通常是不确定的,例如,开关电源转换器[8]、电力电子变换器[9]中都存在节点之间耦合发生概率不确定的现象。文献[10]针对一类具有状态延迟现象的线性时变复杂网络系统,提出了在耦合发生概率和测量缺失概率都不确定下的状态估计问题。
另一方面,由于复杂网络具有复杂的拓扑结构,在受到外界干扰时,可能会发生不同类型的故障。文献[11]和文献[12]分别对具有内耦合故障和执行器故障的复杂网络系统进行容错控制研究。文献[13]针对具有模型不确定性的复杂网络系统,通过设计故障检测估计器和故障隔离估计器,对故障进行检测和隔离。在实际应用中,当系统发生故障时,能够及时估计出故障的大小也是十分重要的。针对复杂网络的故障估计问题,文献[14]通过设计状态估计器,对事件触发条件下的复杂网络系统进行状态和故障的估计。文献[15]研究一类复杂网络的多故障估计问题,并设计了一种新的分布式中间估计器。然而,关于耦合发生概率不确定下复杂网络故障估计问题的研究还比较有限。
受以上文献的启发,考虑研究一类在耦合发生概率不确定下的非线性离散时变复杂网络系统的传感器故障估计问题。文章的创新之处在于:在复杂网络模型中引入系统非线性以及耦合发生概率的不确定性,并考虑常见的传感器故障类型,应用增广状态方法对得到的增广系统设计基于观测器的分布式估计器,实现在线的故障估计。

1 问题描述
考虑由N个耦合节点组成的非线性离散时变复杂网络模型
(1)
其中:i=1,2,…,N;xi(k)∈Rn,yi(k)∈Rq分别为第i个节点的状态向量和测量输出向量;φ(xi(k))为非线性函数;wi(k)∈Rm是均值为零、方差为Qi(k)的过程噪声;vi(k)∈Rq是均值为零、方差为Ri(k)的测量噪声;fi(k)∈Rl为故障向量,这里指传感器故障;Γ=diag{γ1,γ2,…,γn}≥0为已知的连接矩阵;W=[ωij]N×N为耦合配置矩阵,ωij≥0(i≠j);Bi(k)、Ci(k)、Di(k)为具有适当维数的已知矩阵。随机变量λi(k)描述节点之间是否存在耦合现象,λi(k)=1表示节点之间存在耦合关系,λi(k)=0表示节点之间不存在耦合关系,且服从以下的伯努利分布
(2)

在实际系统中,由于环境的变化以及传感器失效、漂移等导致的传感器故障时有发生,常见的有卡死、恒增益变化、恒偏差失效三种[16]。不失一般性,本研究将故障近似表征[17]为:
fi(t)=a0+a1t,
(3)
其中,a0和a1为未知常数向量。当a0=a1=0时,表示没有故障发生;当a0≠0,a1=0时,fi(t)表示未知常值故障;当a1≠0时,fi(t)表示缓变漂移型故障。


(4)


ξi(k+1)=Gξi(k)。
(5)
为了估计故障fi(k),即ξi,2(k),定义增广状态
(6)
通过(5)式和(6)式,可将式(1)改写成如(7)式所示的形式
(7)

对(7)式构造如下估计器
(8)

本研究的主要目的是求取(8)式中估计器的增益矩阵,同时估计器的设计需要满足以下两个条件:
1)存在一组正定矩阵Ξi(k+1|k+1),使得Pi(k+1|k+1)≤Ξi(k+1|k+1);
2)设计估计器的增益矩阵Ki(k+1),使得在每一时刻矩阵Ξi(k+1|k+1)最小。
引理1[18]任意给出两个具有相同维数的实向量α和β,则下面的不等式成立:
αβT+βαT≤ηααT+η-1ββT,
其中,η>0为任意标量。
引理2[19]设矩阵A,M,N和F具有合适的维数,FFT≤I,设X为正定对称矩阵,μ>0为任意标量,且μ-1I-NXNT>0,则下面的不等式成立:

引理3设矩阵A,B,X和P为具有合适维数的给定矩阵,则下面的求导规则成立:
2 主要结果
在本节中,首先推导一步预报误差协方差和估计误差协方差的递推公式。
由(7)式和(8)式,得到状态的一步预报误差
(9)

(10)

(11)

由(9)~(11)式得:
(12)
由(7)式和(8)式,得到状态的估计误差
(13)
定理1对于估计器(8),一步预报误差协方差的递推公式如下
(14)
其中:
证明:根据(12)式得

(15)


定理2对于估计器(8),估计误差协方差的递推公式如下
(16)
证明:根据(13)式得
(17)

由Ε{vi(k+1)}=0得φ6(k+1)=0,根据(17)式可得(16)式,定理2得证。

定理3考虑(14)式和(16)式,存在ηi(i=1,2,3,4)和μ为正实数,在初始条件Pi(0|0)≤Ξi(0|0)的前提下,使得以下两个类似Riccati差分方程的矩阵方程成立

(18)
(19)

(20)
Ξi(k+1|k)和Ξi(k+1|k+1)为上述两个矩阵方程的正定解矩阵,并且满足约束条件μ-1I-Ξi(k|k)>0,则Ξi(k+1|k+1)是Pi(k+1|k+1)的上界,即Pi(k+1|k+1)≤Ξi(k+1|k+1)。此外,估计器的增益矩阵为
(21)
并且所设计的估计器增益矩阵使矩阵Ξi(k+1|k+1)取最小值。
证明:用数学归纳法证明。考虑初始条件Pi(0|0)≤Ξi(0|0),然后假设Pi(k|k)≤Ξi(k|k),只需证明Pi(k+1|k+1)≤Ξi(k+1|k+1)成立。
由式(14),根据引理1得
(22)
(23)
(24)

(25)
在式(22)~(25)中,ηi(i=1,2,3,4)为正实数,ϖi在式(20)中定义。根据估计误差协方差的定义以及不等式的性质得
(26)


(27)
其中,δi(i=1,2,3,4,5,6)在式(20)中定义。根据式(16)和式(27)得
(28)
根据引理3得
+2Ki(k+1)Ri(k+1)。
(29)
令(29)式右端为零,得到
(30)
又因为
(31)
因此,由式(29)~(30)知,增益矩阵Ki(k+1)可以使矩阵Ξi(k+1|k+1)的迹最小,即矩阵Ξi(k+1|k+1)最小。综上,定理3得证。
注:文献[1]和文献[10]研究的是复杂网络的状态估计问题,没有同时考虑系统非线性和节点之间耦合发生概率的不确定性。而实际系统往往是非线性的,并且存在节点之间耦合发生概率不确定的现象。因此,本研究同时考虑了系统的非线性和节点之间耦合发生概率的不确定性。文献[14]通过设计集中式状态估计器对非线性复杂网络进行状态和故障的联合估计,与文献[14]相比,本研究考虑了节点之间耦合发生概率的不确定性,并且考虑不同类型的传感器故障,构造分布式估计器对故障进行估计,减少了计算复杂度。因此,本研究所考虑的问题是比较全面的。
3 仿真验证


为了验证该估计器的有效性,考虑不同类型的传感器故障,设f1(k)和f2(k)为未知常值故障,f3(k)为缓变漂移型故障,f4(k)为上述两种故障的组合形式。故障的表达式如下:


分别对复杂网络4个节点的故障进行估计,仿真结果如图1~4所示,可以看出,对于这四种不同类型的故障,所设计的估计器都能够达到很好的估计效果。
4 结论
研究了由N个耦合节点组成的非线性离散时变复杂网络系统的传感器故障估计问题,并且节点之间耦合发生的概率是不确定的。首先将系统状态和故障进行增广,对得到的增广系统构造基于观测器的估计器,然后设计合适的估计器增益矩阵,使得估计误差协方差的一个上界有最小值,最终实现传感器故障的在线估计。仿真结果表明,当复杂网络发生不同类型的传感器故障时,所设计的估计器都能够较准确的估计出故障的幅值。为了减少网络通信负担,在后续的研究中,将根据实际系统的性能需求采取不同的传输协议,如事件触发传输协议、Round-Robin协议等。

表1 估计器增益矩阵Ki(k)的值

图1 节点1故障及其估计
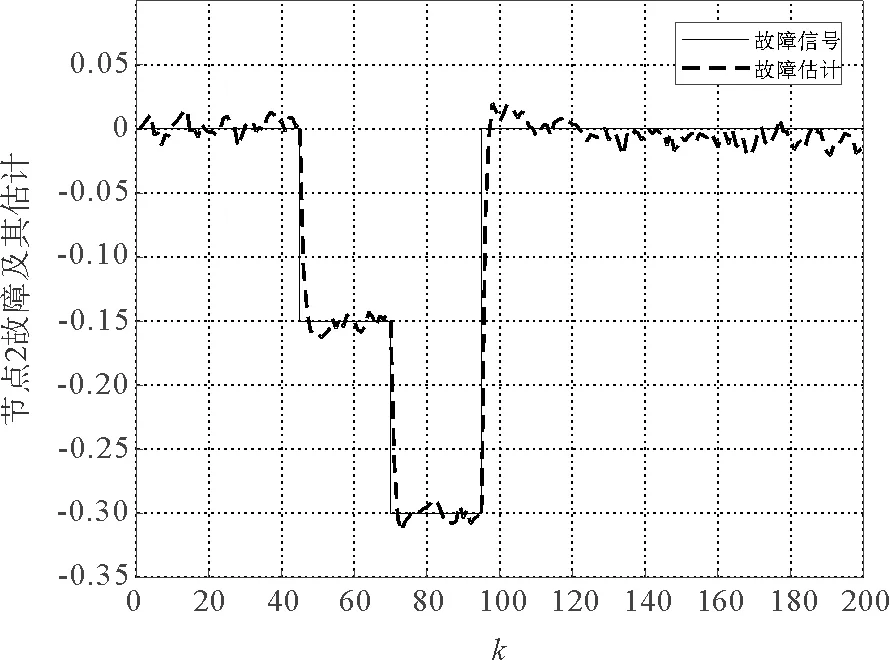
图2 节点2故障及其估计

图3 节点3故障及其估计

图4 节点4故障及其估计
