基于模糊自整定双闭环控制的直流微电网母线稳压策略
2020-03-09王瑜琳张烈平罗浩文
张 玉,王瑜琳,张烈平,罗浩文
(桂林理工大学 a.机械与控制工程学院; b.广西建筑新能源与节能重点实验室,广西 桂林 541006)
光伏直流微电网是整合了多种分布式电源、储能装置、能量转换装置和负载的小型电力系统,既可以与大电网并网运行,也可以脱离大电网离网运行。母线电压是衡量直流微电网安全稳定的唯一指标,解决光伏输出功率和负载消耗功率不匹配引起的母线电压波动,保证电能质量是亟需解决的关键问题[1-3]。 目前离网型微电网的不平衡功率主要依靠储能装置进行补偿,通过双向DC/DC变换器并入母线,根据母线电压的大小,储能装置既可以作为提供能量的微电源,也可以作为储存能量的负载,实现能量的双向流动,从而达到维持系统安全稳定运行的目的。
储能变换器一般采用电压电流双闭环控制[4-5], 传统双闭环控制过于依赖控制对象的数学模型, 不能根据外界变化实时优化控制参数, 导致控制精度低, 鲁棒性差[6]。 文献[7-8]分别采用基于模型预测控制算法MPC和伪滑模控制, 提高了系统的动态响应速度, 但是这两种方法均为非线性控制, 原理与设计较为复杂。 文献[9]采用传统峰值电流和谷值电流控制, 提高了系统动态响应速度, 但系统的抗干扰能力较差。 文献[10]基于小波神经网络结合传统PID, 并采用遗传算法寻优的控制策略, 提高了系统的稳定性, 但是需要增加额外的电流保护模块, 增加了系统成本, 同时其动态响应性能也较差[12]。 基于此, 本文采用模糊控制对传统的双闭环控制进行改进, 根据外界条件实时整定电压外环PI控制参数, 优化控制效果。
1 光伏直流微电网结构图
1.1 光伏直流微电网拓扑结构图
光伏直流微电网拓扑结构如图1所示,主要由光伏电池、蓄电池、负载以及相应的直流变换器组成,光伏电池通过Boost变换器并联到直流母线上,运行于MPPT工作模式,蓄电池通过双向DC/DC变换器(BDC)并联到直流母线上,能实现能量的双向流动,对系统的不平衡功率进行补偿,负载通过Buck变换器并联到直流母线上,本文主要针对离网型光伏直流微电网稳定运行问题展开研究。
1.2 光伏直流微电网主电路结构图
离网型光伏直流微电网主电路结构如图2所示,
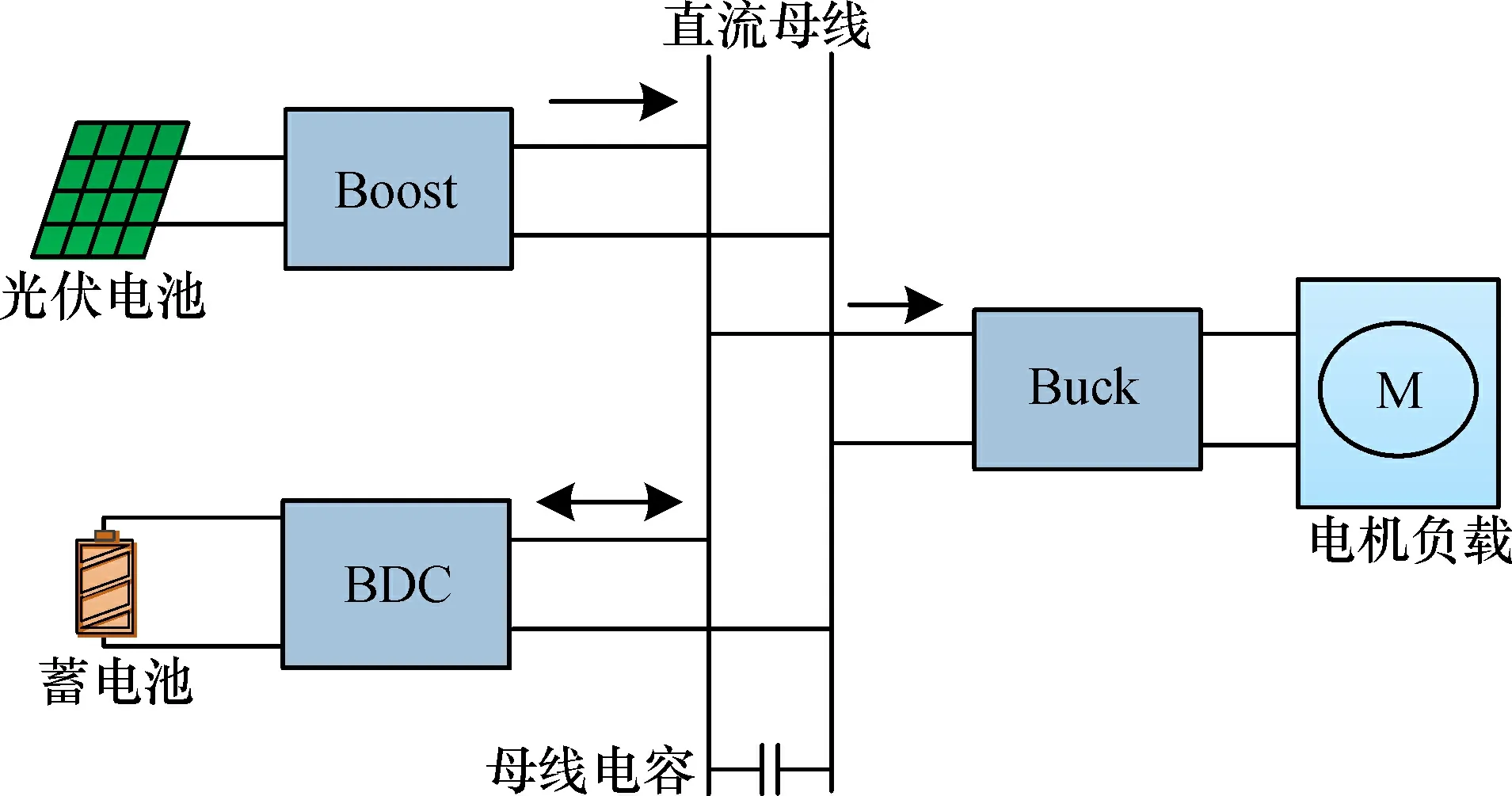
图1 光伏直流微电网拓扑结构
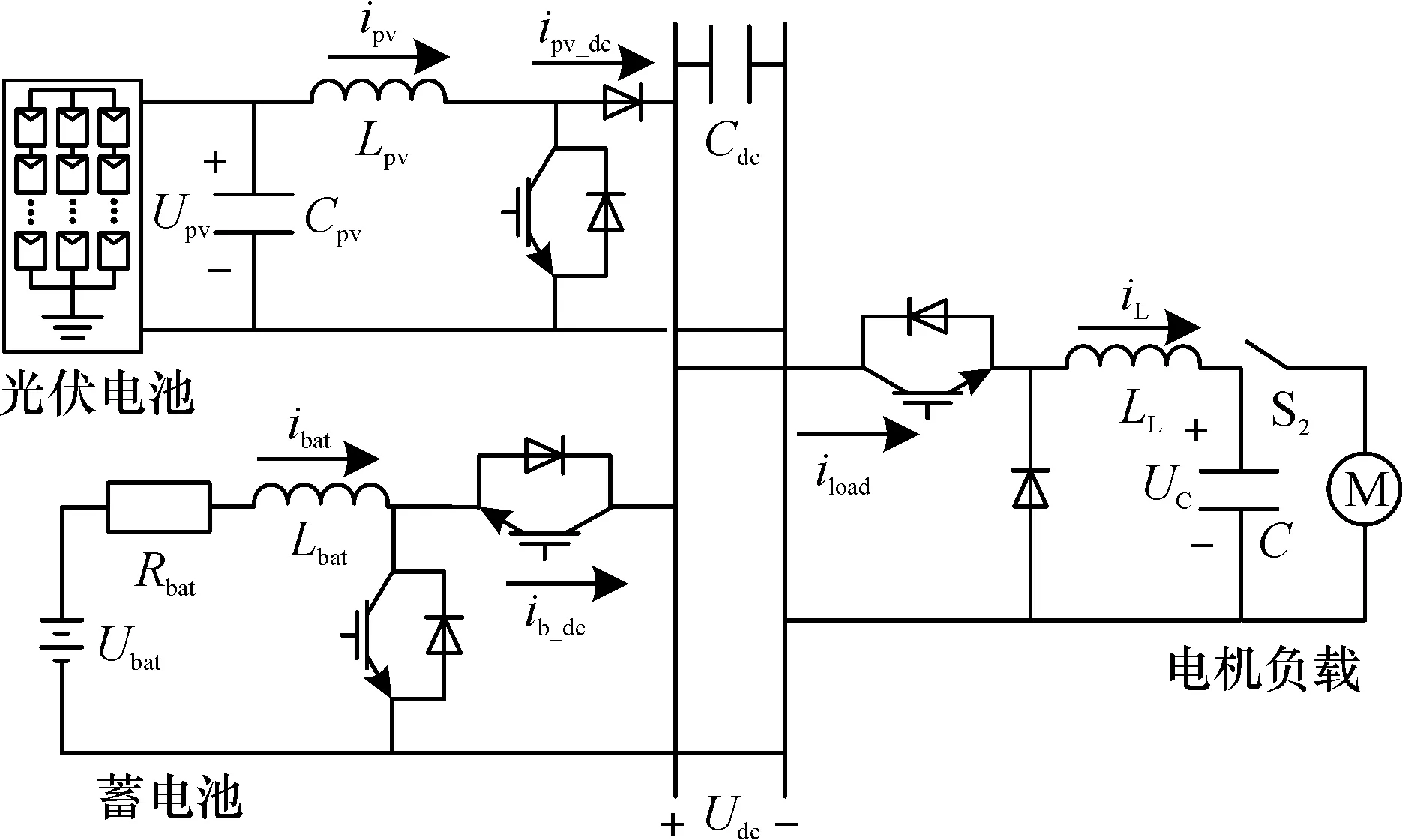
图2 光伏直流微电网主电路结构图
其中:Lbat、ibat分别为蓄电池双向DC/DC变换器的储能电感以及流经该储能电感中的电流;Lpv、ipv分别为Boost变换器的储能电感以及流经该储能电感中的电流;LL、iL分别为Buck变换器的储能电感以及流经该储能电感中的电流;Rbat为双向DC/DC变换器储能电感的寄生电阻;ipv-dc表示Boost变换器输出电流;ib-dc为双向DC/DC变换器输出电流;iload、UC分别表示Buck变换器输入电流以及输出电压;C为Buck变换器的滤波电容;Upv为光伏电池的输出电压;Cpv为光伏侧滤波电容;Ubat为蓄电池端电压;Cdc为直流母线电容;Udc为直流母线电压。
根据基尔霍夫电流定理可得光伏直流微电网的动态方程为
(1)
可知, 直流母线电压同时受光伏输出电流、 负载电流以及储能单元输出电流的影响, 当光伏输出功率小于负载消耗时, 蓄电池放电,给系统提供能量, 此时ib-dc为“+”; 当光伏输出功率大于负载消耗时, 蓄电池充电,吸收系统多余能量, 此时ib-dc为“-”。 通过控制蓄电池的充放电,可以维持母线电压稳定,保证系统安全稳定运行。
2 传统双闭环控制

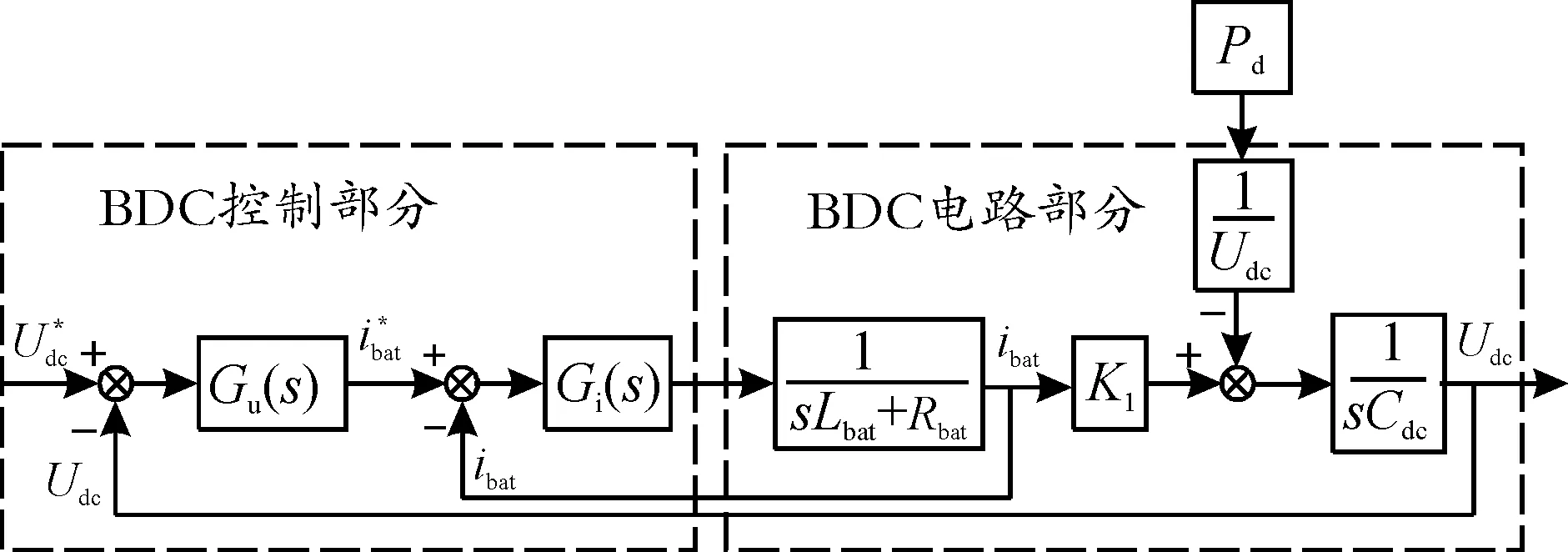
图3 传统双闭环控制框图
电流内环的闭环传递函数为
(2)
电流内环、 电压外环PI控制器可用式(3)表示
(3)
式中:Ki为电流内环PI控制器比例系数;Ti为电流内环PI控制器积分系数;Ku为电压外环PI控制器比例系数;Tu为电压外环PI控制器积分系数。 将式(3)代入式(2)可得
(4)
为简化电压外环分析过程,将电流内环作为比例环节,令其为K2,可得电压外环传递函数为
(5)
可知, 传统的双闭环控制对扰动功率Pd(s)起到了一定的抑制作用。然而,双闭环控制通过PI进行调节,存在响应速度慢、参数整定困难等问题。以往对于控制系统参数的整定,需要丰富的经验,一经整定,基本不变,其参数的设置无法根据实际运行工况实时调整,难以获得控制参数的最优值,不利于系统扩展以及即插即用,导致系统的自适应性以及鲁棒性较差。
3 模糊自整定双闭环控制器
3.1 模糊控制基本原理
模糊控制是以模糊集理论、 模糊语言变量和模糊逻辑推理为基础的一种智能控制算法, 鲁棒性较强,适应于解决过程控制中的非线性、 强耦合时变、 滞后等问题[14], 模糊控制结构如图4所示。
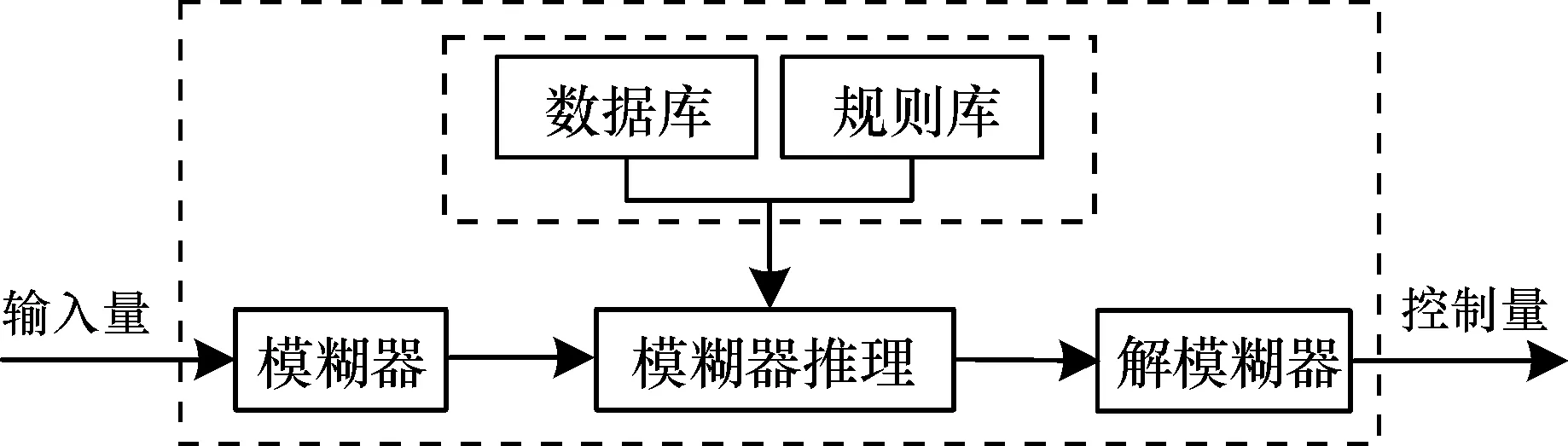
图4 模糊控制器结构图
模糊控制过程分为模糊化、模糊逻辑推理和解模糊判断3个步骤,分别由模糊控制器的模糊器、模糊推理机和解模糊器完成。模糊系统的性能优劣主要取决于模糊控制器的结构、模糊规则、推理算法以及模糊决策等因素。
3.2 模糊自整定双闭环控制器的设计
传统双闭环控制存在响应速度慢、抗干扰能力差等问题,本文在传统双闭环控制的基础上引入模糊控制,采集储能变换器的实时输出电压与其参考值进行比较可得到偏差值e以及偏差变化率ec,通过模糊规则推理后得到比例、积分参数的修正值ΔK、ΔT,从而实现根据工况变化实时调整PI控制器的控制参数,优化控制效果[15],提高系统抑制母线电压波动的能力,其控制框图如图5所示。

图5 模糊自整定双闭环控制器框图
模糊自整定双闭环控制器的比例、积分参数实时调整,如式(6)所示, 其中,K*、T*分别为电压环控制器比例、 积分参数的初始值;K、T是调整后控制器控制参数的当前值。
(6)
隶属函数与模糊规则的设定是模糊控制的关键部分, 先分别对模糊自整定双闭环控制器的输入量e、ec和输出量ΔK、 ΔT设定隶属函数的类型及其数量, 定义输入变量、 输出变量基本论域为[-5,5], 偏差变化率ec定义模糊子集{NB,NS,ZO,PS,PB}分别代表负大、 负小、 零、 正小、 正大。 偏差值e、 比例环节ΔK和积分环节ΔT均定义模糊子集为{NB,NM,NS,NO,PO,PS,PM,PB}, 分别代表负大、 负中、 负小、 零负、 零正、 正小、 正中、 正大。 对于模糊控制的隶属函数一般采用对称三角形, 其运算较为简单, 所占内存空间较小, 比较适用于隶属函数在线调整的模糊控制。 论域变换如图6所示, 输入量e、ec和输出量ΔK、 ΔT的隶属函数分别如图7a、b、c所示。根据模糊控制隶属函数和控制理论,可得输出变量ΔK、ΔT的模糊控制规则,如表1所示。
根据以上模糊规则,可以得到模糊控制器ΔK输入输出关系三维曲面图如图8所示,ΔT类似。
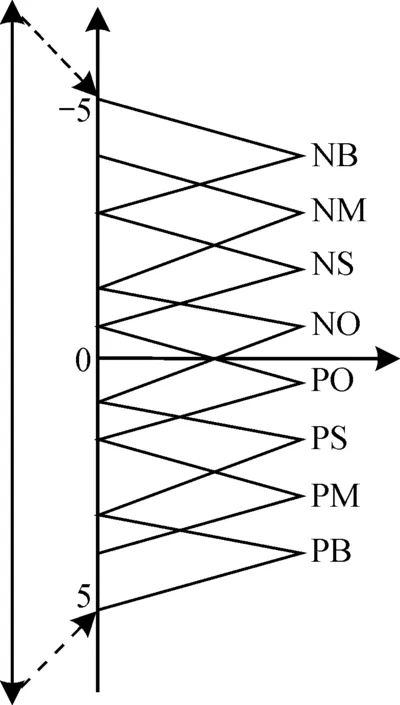
图6 论域变换示意图图

表1 ΔK、ΔT的模糊控制规则
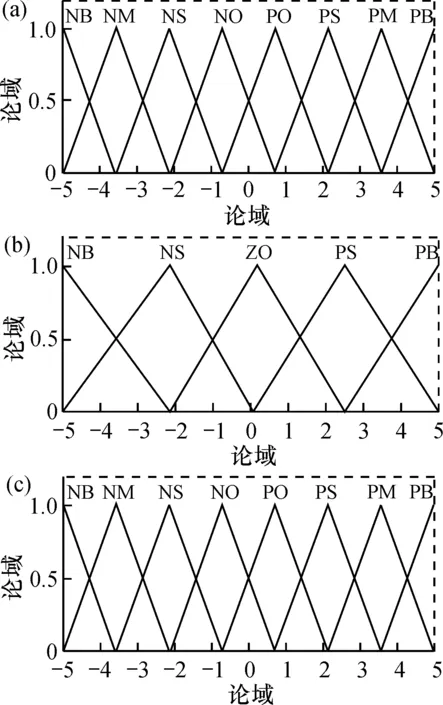
图7 e(a)、ec(b)、和ΔT(c)隶属函数图
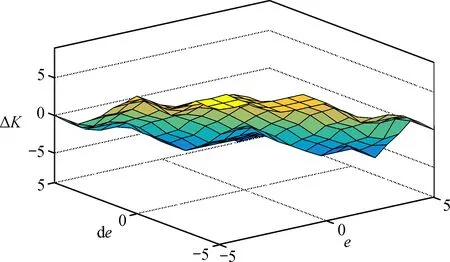
图8 模糊控制器输入输出关系图
采用模糊控制对双闭环控制PI参数进行整定, 能够根据实际情况实时优化系统参数, 提高系统抑制母线电压的波动的能力, 提高系统的鲁棒性。
4 仿真及其结果
根据图2所示的光伏直流微电网主电路结构图,在MATLAB/Simulink中搭建仿真模型,如图9所示,系统仿真参数如表2所示。
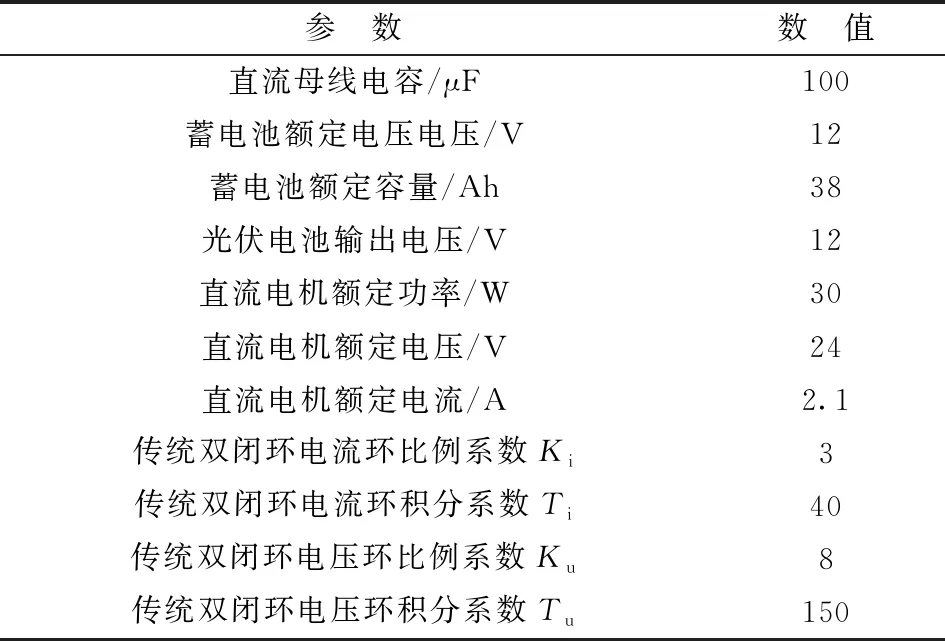
表2 系统仿真参数
直流母线电压期望值为650 V,光伏模块Boost变换器采用最大功率点跟踪(MPPT)控制模式, Buck变换器采用电压单闭环控制, 将母线电压降压至电机额定电压, 以保证电机正常工作。
储能变换器在传统的双闭环控制以及模糊自整定双闭环控制下, 微电网在系统初始上电、 负载突增、 负载突减3个不同暂态过程中抑制母线电压波动的能力。不同控制策略下母线电压的波形如图10a所示,系统初始上电、负载突增、负载突减3个不同暂态过程中母线电压的放大图分别如图10b、c、d所示。
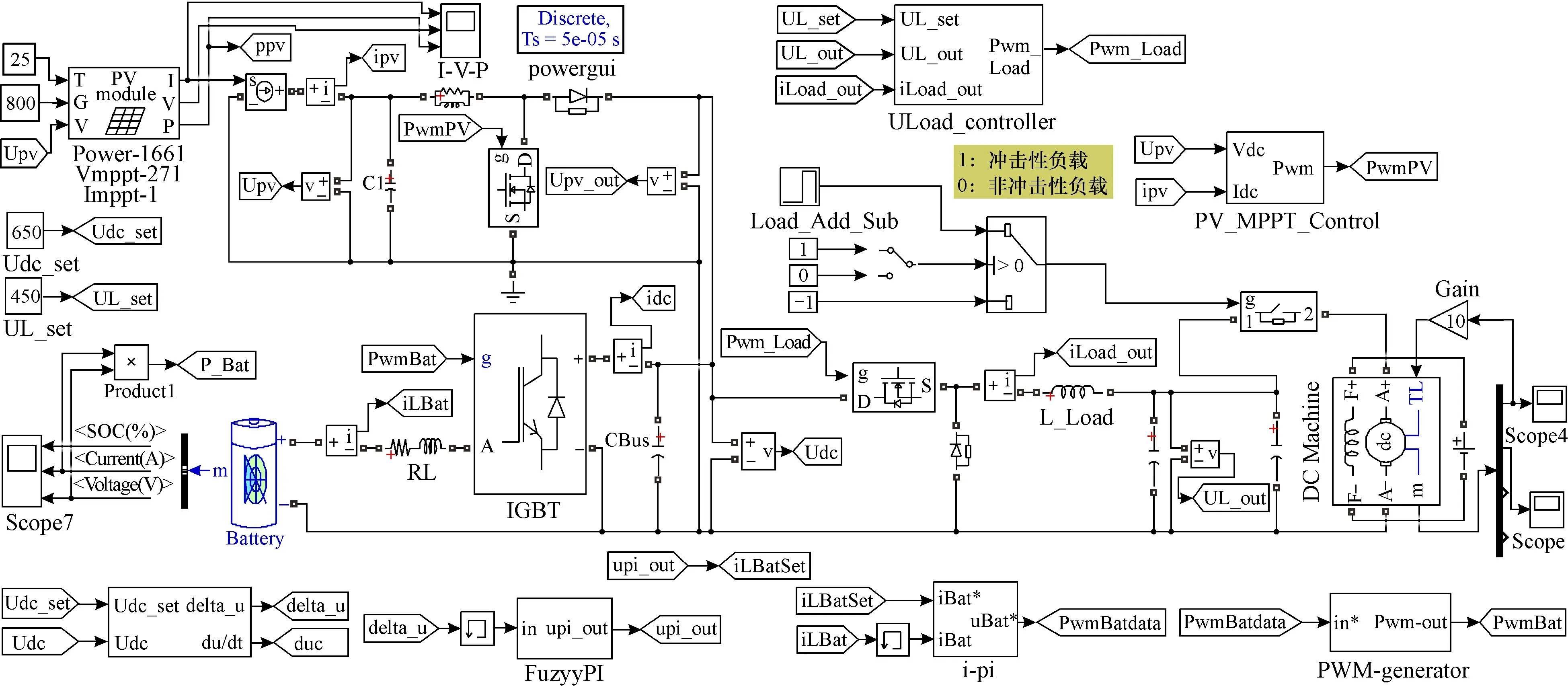
图9 光伏直流微电网仿真结构
由图10b可知, 系统初始上电时, 采用传统双闭环控制直流母线电压的超调量为19.2 V, 在0.6 s时稳定至650 V; 采用模糊自整定双闭环控制时, 直流母线电压的超调量为1.6 V, 在0.6 s时逐渐稳定到650 V。 由图10c可知, 在1.5 s时突增负载功率, 传统双闭环控制下母线电压跌落较大, 达14.8 V, 2 s左右稳定至650 V左右, 在恢复期间出现超调现象; 采用模糊自整定双闭环控制时, 负载突增瞬间, 母线电压跌落7.5 V, 在1.8 s时逐步稳定至650 V, 且在恢复期间无超调和稳态误差。 由图10d可知, 2.5 s时负载突减, 采用传统双闭环控制时母线电压上升13.4 V, 在2.9 s后逐渐恢复稳定且恢复期间有超调量; 采用模糊自整定双闭环控制时, 负载突减,母线升压7 V, 且在2.8 s时逐渐恢复稳定, 恢复期间超调量较小。
根据以上分析可知,在系统初始上电、负载突增、负载突减3个不同的暂态过程中,相对传统的双闭环控制,模糊自整定双闭环控制下母线电压的超调量较小,动态响应速度较快,抗扰度能力较强。
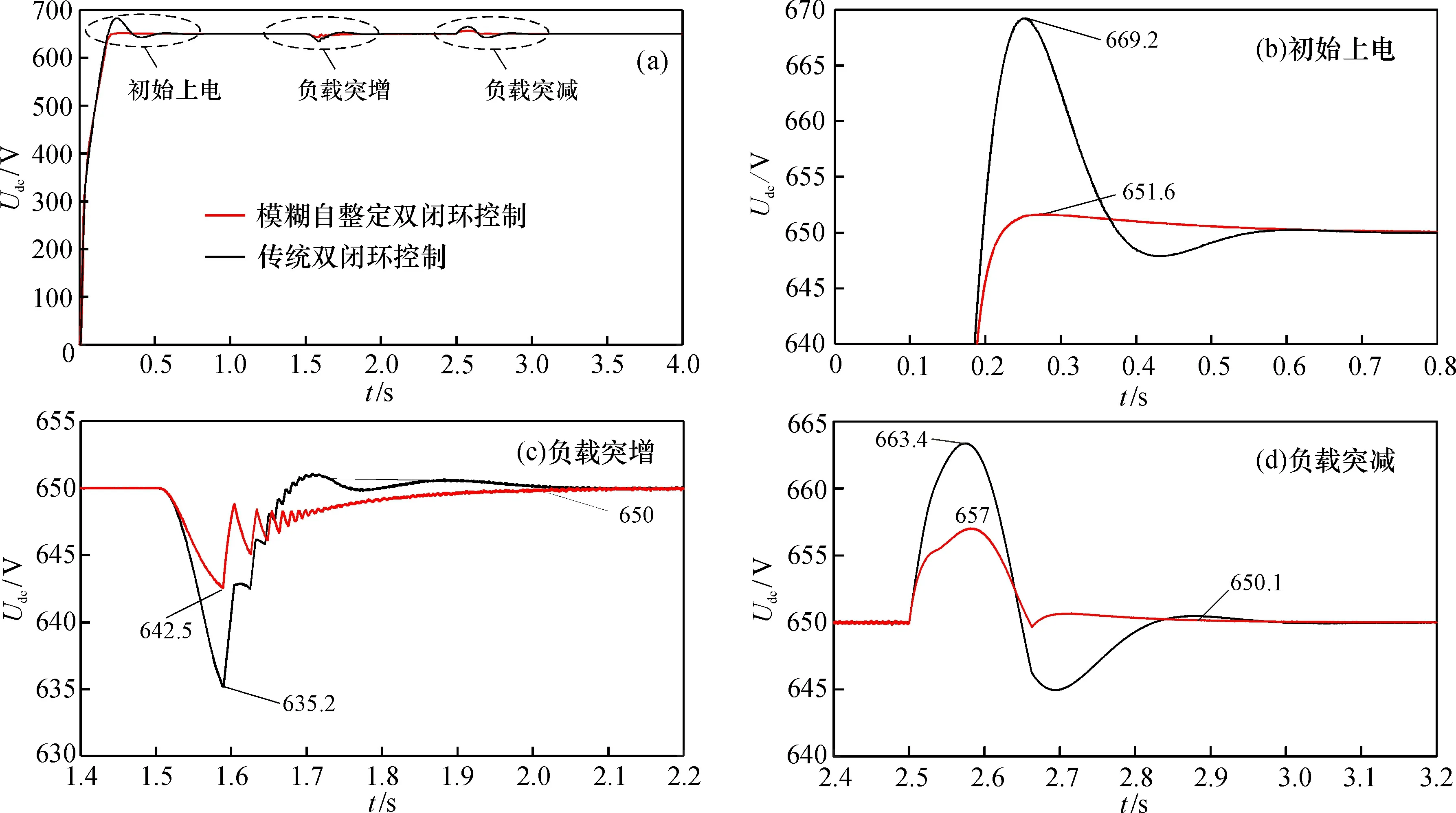
图10 母线电压对比图
5 结 论
针对传统双闭环控制响应速度慢、PI参数整定困难等问题,本文基于传统的双闭环控制与模糊控制理论相结合,提出一种模糊自适应双闭环控制系统,实时整定电压外环PI控制参数,优化控制效果。仿真结果表明,在系统初始上电、负载突增、负载突减3个不同的暂态过程中,相对于传统的双闭环控制,模糊自整定双闭环控制具有较强的自适应性,不仅提高了系统的动态响应性能,同时也能有效抑制母线电压的波动,增强了系统的鲁棒性。
