新型湿地型多功能工作机切割器设计
2020-03-08尤宽山宋力沈静沈辉周竹馨
尤宽山 宋力 沈静 沈辉 周竹馨
摘要:为解决当前人工湿地水生植物季节性收割工作效率低的问题,研发一种能够在复杂地形下收获沉水植物和大面积挺水植物的湿地轻型两栖式多功能工作机。对工作机的关键部件切割器进行设计,设计过程中通过数学建模与运动学分析,应用ADAMS软件仿真分析切割器运行期间割刀的位移、速度以及加速度随时间的变化特性。结果表明,该新型湿地型多功能工作机的漏割率小于等于2%,收割宽度达2 200 mm,往复式切割器工作稳定、切割效果良好,能很好满足人工湿地水生植物的收割需求。
关键词:新型湿地型多功能工作机;往复式切割器;设计;仿真分析
中图分类号:S225.5+9 文獻标志码:A 文章编号:1002-1302(2020)21-0238-03
人工湿地工程为近年来各地方积极推广的新型水源地工程。该类工程中的水生植物每年春、秋2季需要重复进行收获、维护,往往大量的工作集中在几周内进行,工作量巨大。湿地水生植物周期性维护的主要方式为采用机械化收割,这提高效率、降低成本,但现在市面上的收割机械大多数为大型收割机械[1-3]。人工湿地地形具有水域宽广、水生植物种植面分散、局部地形空间多变、形状不规则等特点,势必会对大型机具的运行、转向、机动性造成影响,而新型湿地型多功能工作机械的研制,能较好地解决这一问题,满足市场需求。
1 总体结构及切割器设计
1.1 系统组成
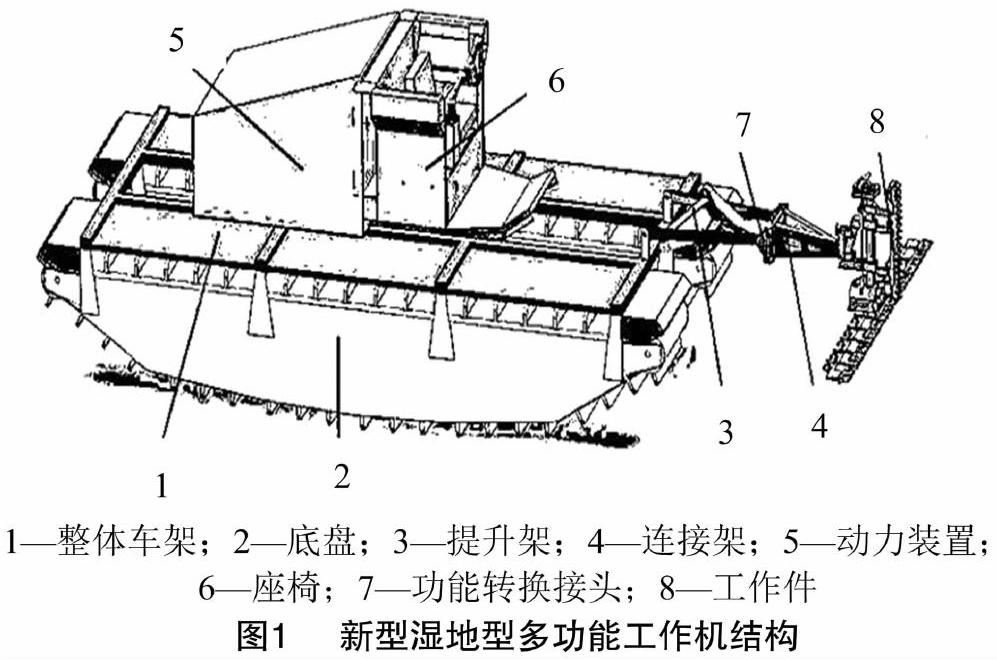
新型湿地型多功能工作机由整体车架、底盘、连接架、提升架、动力装置、功能转换接头、座椅和工作件等组成,结构见图1。提升架的作用是调整工作件的高度,控制切割高度;连接架起到伸长和减震的作用;功能转换接头使工作装置的安装和拆卸更加方便,可装配不同的工作装置[4]达到多种功能。工作机除装配“T”形刀头用来收割水草和湿地植被外 也可装配钻头用来厚冰钻孔,起到冰上抢险救灾的作用。
1.2 整机技术参数
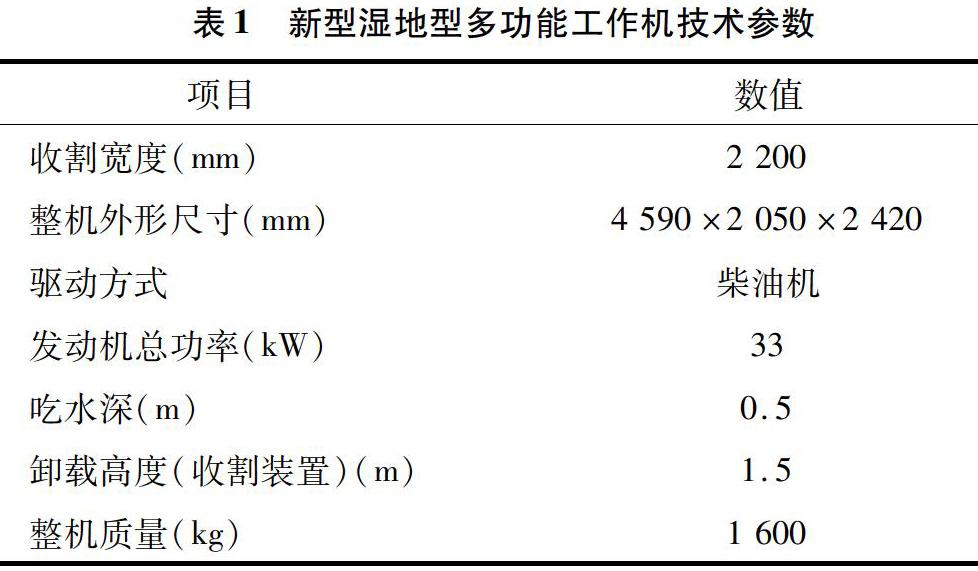
新型湿地型多功能工作机技术参数见表1。
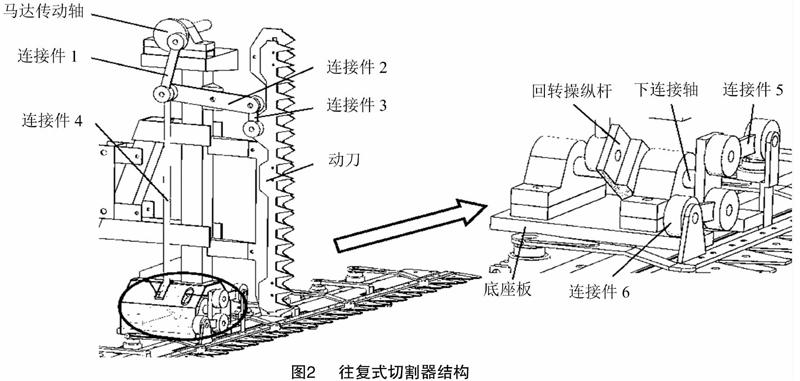
1.3 切割器结构设计
往复式切割器由电机驱动传动轴转动,结构见图2。
2 切割器运动及功耗分析
2.1 割刀的运动方程
割刀的运动特性[5]是评价切割器性能的关键因素,往复式切割器可简化为曲柄连杆机构,由曲柄旋转驱动的连杆做往复直线运动,结构见图3。
现建立动刀片的运动方程:
式中:Vx为动刀片速度,m/s;ω为动刀片的角速度,rad/s;r为曲柄半径,mm;x为动刀片的位移,m;t为曲柄运动的时间,s;a为动刀片的加速度,m/s2。
由式(4)可知,割刀速度与割刀位移的函数关系满足椭圆方程,椭圆的长半轴为rω,椭圆的短半轴为r,如图4所示。它反映了割刀在任一点的速度都不相同。由上可知,刀片上任一点的速度变化规律与椭圆方程一致。当位移为0,即x=0时,该点位于刀片的中点,此时Vx取得最大值,即为rω;当位移为r,即x=±r时,该点位于刀片的极左端或极右端,此时Vx取得最小值,即为0。
2.2 切割器的功率损失
切割器工作时的功率损失主要由切割功率损失(Ng)和空转功率损失(Nk)组成[6-7]。
式中:Vm为机组前进速度,取5 km/h;B为机组作业幅宽,m;L0为割刀切割单位面积的植物茎秆所需要的功值,N·m/m2,取200。
将数代入公式(5)、(6)可算得:N总=Ng+Nk=2.82 kW。
由上可知,与其他同类型的切割器相比,新型湿地型多功能工作机切割器消耗的功率较小,满足要求。
3 运动学仿真分析
为直观分析切割器运行期间刀具的位移、速度和加速度的特性,使用ADAMS软件进行运动仿真[8-9]。切割器的仿真模型如图5所示。利用电动机带动传动轴转动,转速为550 r/min。
由图6-a可知,割刀的位移是正弦曲线,曲线的波峰和波谷的极限值是动刀片在2个不同方向上的最大位移[10]。由图6-b可知,当曲柄以恒定速度旋转时,在连杆驱动下,割刀速度变化可以近似为简谐运动。动刀片的Vmax在起始位置,动刀片速度为0时在动刀片位移最大处。由图6-c可知,割刀的加速度也显示为近似简谐运动。动刀片的amax在动刀片位移最大处,而最小加速度值出现在初始点。
4 性能试验
选取在水生植物生长茂盛的秋季进行湿地轻型两栖式多功能工作机综合性能测试(图7),测试结果见表2。通过实测参数进行分析可知,该新型湿地型多功能工作机基本实现了在人工湿地复杂区域条件中对水生植物进行大面积连续性作业,收割深度可以在适当的范围内进行调整,为适应复杂地形、两栖作业的功能,且工作机性能稳定可靠,达到动力与效率的整体平衡[10-12]。
5 结论
对湿地轻型两栖式多功能工作机的关键部件进行运动分析,从理论上证明割刀位移、速度以及加速度均为关于时间的正弦和余弦函数。
运用三维建模软件SolidWorks建立模型,并导入ADAMS仿真软件添加连接与驱动,进行运动仿真分析,得到割刀位移、速度和加速度随时间的变化特性,动刀片Vmax在起始位置,动刀片速度为0时在动刀片位移最大处;动刀片的amax在动刀片位移最大处,而最小加速度值出现在初始点。
试验表明,新型湿地型多功能工作机在满足设计要求的同时也能保证工作效率和漏割率。对于新型湿地型多功能工作机的传动系统以及切割器刀片的高度确定还需进一步研究,以达到更好的切割效果。
新型湿地型多功能工作机是处理水生植物收割问题的一种高效工具,可以解决人工劳动强度大、效率低等问题。本研究工程机往复式切割器的设计过程中利用三维软件构建了三维实体模型,并进行动态仿真模拟,验证了工作装置运行的合理性。
参考文献:
[1]钱争光,茹利军. 6-CDW-220型微型采茶机的设计[J]. 中国茶叶加工,2015(2):58-60,71.
[2]席海亮,赵春花. 基于ADAMS的4GH120型牧草收割机切割器运动仿真分析[J]. 甘肃农业大学学报,2013(6):160-163.
[3]唐 斌,李显旺,袁建宁,等. 工业大麻微型收获机械的技术与发展分析[J]. 中国农机化学报,2018,39(2):17-21.
[4]汤 跃,赵 进,邱志鹏,等. 基于虚拟样机的桁架式喷洒车稳定性动力学仿真[J]. 农业机械学报,2015,46(7):72-78.
[5]袁 洁. 往复式甘蔗收割机设计及仿真分析[D]. 昆明:昆明理工大学,2017.
[6]刘 源,李浙昆,吴海涛,等. 往复式切割器速度参数优化设计与分析[J]. 农机化研究,2011,33(8):42-47.
[7]谢 斌,李静静,鲁倩倩,等. 联合收割机制动系统虚拟样机仿真及试验[J]. 农业工程学报,2014,30(4):18-24.
[8]北京农业工程大学. 农业机械学(下册)[M]. 北京:中国农业出版社,2010.
[9]施印炎,陈 满,汪小旵,等. 芦蒿有序收获机切割器动力仿真与试验[J]. 农业机械学报,2017,48(2):110-116.
[10]施印炎,章永年,汪小旵,等. 基于Pro/E的茎叶类蔬菜有序收获机设计[J]. 农机化研究,2017(3):139-143.
[11]宋 力,沈 静. 轻型两栖式多功能工作机在人工湿地水生植物维护中的应用[J]. 江苏水利,2019(7):5-8.
[12]宋 力. 新型湿地型多功能工作机研发现状[J]. 人民长江,2019(12):92-94.孙孝龙,徐 森,周卫阳,等. 基于物联网和深度学习的养蚕智能监控系统设计[J]. 江苏农业科学,2020,48(21):241-244.
