配电网架空线路绝缘包覆机器人设计
2020-03-05苏建军张胜军许永盛
李 鹏,苏建军,王 刚,张胜军,许永盛
(1.国网山东省电力公司菏泽供电公司,山东 菏泽 274000;2.国网山东省电力公司,山东 济南 250001)
0 引言
架空线路是电力传输的主要形式之一,我国架空线路分布广、长度长,线路环境复杂,其安全稳定运行直接影响供电系统的可靠性。配电网架空线裸导线高度低,容易与树木、建筑物等接触造成短路;沿海等高腐蚀区域和高污染区域的架空线路导线腐蚀快,应用年限短,急需采取导线防腐措施;裸线形式的架空线路,长期工作后,导线表面和绞线缝隙之间易积聚大量的灰尘、油迹、污垢及鸟粪等杂物,容易在暴风雨中形成泥流造成导线间的意外短路,引发配网导线的意外跳闸等事故。
为提高输电的安全性,对配电网架空线路进行绝缘化改造势在必行。采用机器人技术在裸导线表面涂覆一层绝缘材料是一种有效的工程技术手段。但目前机器人技术在电力输电线方面的应用主要集中在巡检机器人[1-4]和除冰机器人[5]等领域。文献[6-7]涉及的架空线路绝缘漆喷涂机器人均使用液态黏稠度较低的绝缘材料,绝缘材料供给都采用泵压式。受制于绝缘材料的形态和喷涂头的设计,实际应用易出现流挂现象,效果不理想。文献[8]采用黏稠度较高的新型绝缘材料,很好地解决了流挂现象,但由于采用立式结构,机器人本体占用的空间较大,容易与树木发生接触,安全性较差,且喷涂头设计采用单腔体结构,无法保证绝缘涂层上下表面厚度的一致性。
综上,针对配电网架空线路绝缘化改造,设计一款绝缘包覆机器人,能够均匀包覆导线,且避免出现流挂现象。
1 绝缘包覆机器人整体结构
架空线路绝缘包覆作业,采用机器人携带绝缘涂料,利用喷涂装置将绝缘涂料均匀包覆在裸导线表面。根据功能要求,绝缘包覆机器人可分为机器人本体和控制系统两部分。控制系统包括集成在机器人本体内部的运动控制系统和地面遥控系统。
机器人本体由移动机构、涂料供给系统、绝缘包覆头组成。移动机构作为机器人沿导线行走的动力机构,由1 个250 W 的直流无刷电机驱动2 个橡胶滚轮,2个橡胶滚轮通过同步带轮和同步带链接。如图1 所示。
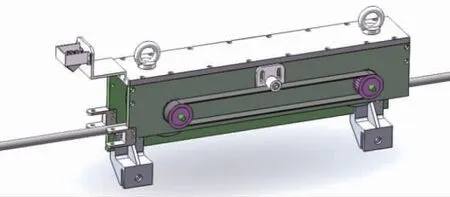
图1 移动机构
涂料供给系统水平悬挂于移动机构下方。4 个独立的柱塞式涂料桶为绝缘涂料载体固定在涂料供给系统前端。4 套直流伺服电机驱动的电动推杆推动涂料桶底部活塞,挤压涂料从前端出口流出,沿导管进入绝缘包覆头。如图2 所示。

图2 涂料供给系统
绝缘包覆头扣合在线缆上。采用对称结构,内侧中心与架空线缆契合,起到支撑和导向作用。绝缘包覆头出口距离线缆外径一定距离,以保证绝缘涂料厚度。绝缘包覆头通过挂钩与移动机构相连。如图3 所示。

图3 绝缘包覆头
绝缘包覆机器人整体结构如图4 所示。调节移动机构行进速度与涂料供给速度均匀匹配,可在裸导线表面包覆一层厚度均匀的绝缘皮。依据不同型号、线径的裸导线,设计走涂速率适应参数列表,以实现对不同的线径选择不同的行走速度以及涂料供给速度,完成均匀包覆功能。待绝缘涂料固化后,达到裸导线绝缘化改造的目的。机器人整体结构如图4 所示,由行走机构、涂料供给系统、绝缘包覆头3部分组成。

图4 整体结构
2 绝缘包覆机器人控制系统
2.1 系统组成
绝缘包覆机器人控制系统分为地面站遥控图传系统和机器人本体控制系统,如图5 所示。操作人员通过地面站向机器人发送遥控指令,实时更改机器人作业参数,并通过显示器显示机器人的状态参数和实时影像资料。

图5 控制系统结构
无线电数据传输模块选用AC4490,采用跳频技术,抗干扰能力强,传输距离远。
视频图像回传系统采用基于第4 代移动通信核心技术的COFDM 正交调制解套技术,使得该系统具有良好的传输特性。同时,由于采用了基于DVD标准的MPEG-2 图像压缩和编码技术,使得接收图像十分清晰、实时和稳定。
机器人本体控制系统涉及多电机协调控制,为提高系统可靠性,控制系统采用CAN 总线结构。主控MCU 作为主站,行走电机驱动和4 个电缸电机驱动器作为从站。
行走电机采用250 W 直流无刷电机,配91∶1 减速器,在保证15°爬坡角度的前提下,兼顾行走速度。由于绝缘材料粘滞系数较高,为了克服绝缘材料与桶壁的阻力,电缸电机需要提供足够的扭矩才可以保证绝缘材料挤出速率的稳定,为此选择直流有刷电机配936∶1 减速器。所有电机均采用ELMO 15/60驱动器驱动,驱动器与主控板的接口仅有CAN 接口,采用菊花链方式连接,接线简洁。
2.2 通信协议
遥控器与机器人本体之间的通信协议采用如下格式:
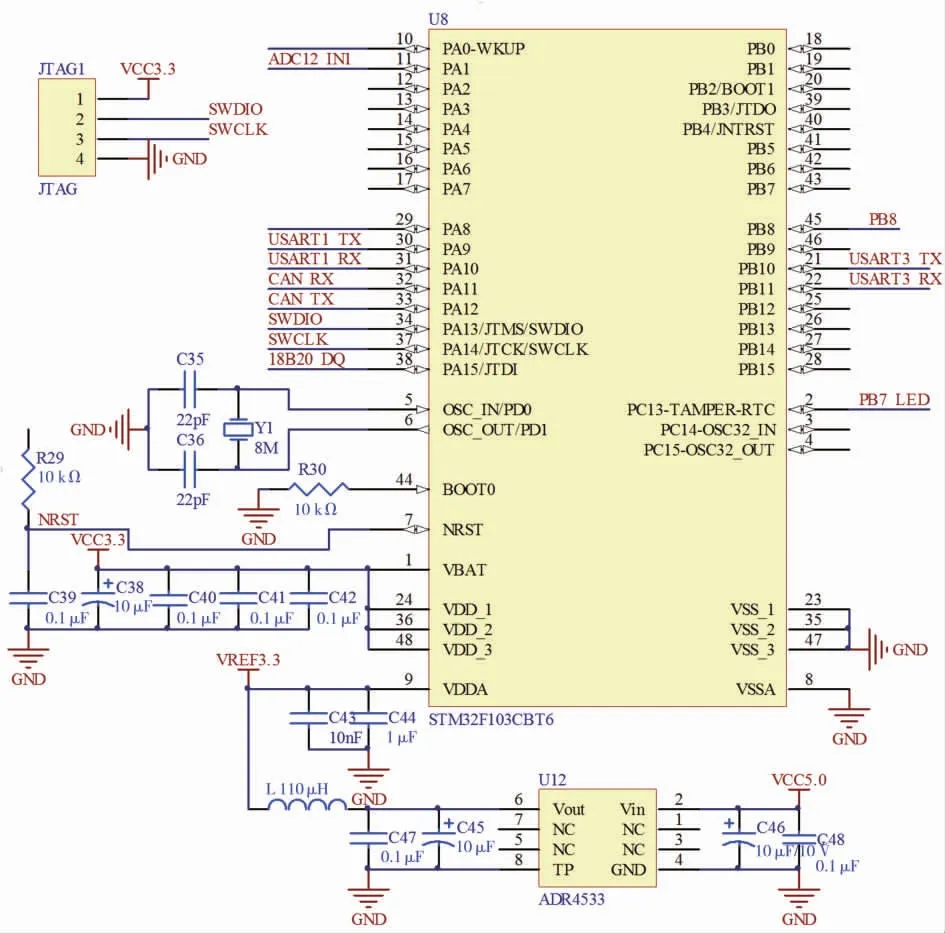
图6 控制器接口电路

其中,%是帧头,代表一帧数据的开始,CMD 是2 位指令码,表示当前指令类型,DATA 是4 位数据,[]内是可选内容,当需要同时发送2 条指令时可以采用’&’连接符连接,*代表一帧数据的结束。
机器人向遥控器端返回的数据帧格式如下:

其中,@ 是帧头,表示一帧数据的开始,BV 用3位数字表示电池电压,MS 用3 位数字表示机器人工作状态,CS 用3 位数字表示控制类型,Sp1—Sp4 分别用3 位数字表示绝缘材料消耗百分比。
数据帧均采用字符串格式传送。
2.3 机器人本体控制电路硬件设计
机器人本体控制系统处理器采用STM32103CBT6,电路设计如图6 所示,USART1 与AC4490 连接,接收遥控器指令、反馈机器人状态;CAN_RX、CAN_TX与CAN 接口芯片连接,作为主站接口;USART3 与RS485 接口芯片连接,向CCD 测径仪发送控制指令。
通过MCU 的PB8 口控制URB2412D-30W 的输出,可以在不需要图像传输时,切断图像传输系统供电,达到节能的效果,如图7 所示。
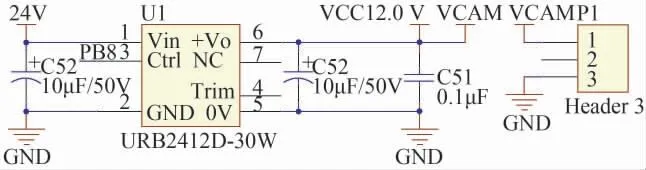
图7 图像传输供电电路
机器人采用24 V 锂电池供电,通过电阻分压,对锂电池电压采样,可以实现对机器人剩余电量的实时监控,采样电路如图8 所示。

图8 电压采样电路
2.4 机器人本体控制软件设计
机器人本体控制系统通过UART 与地面站数据交互,以中断形式接收遥控器的控制指令,根据指令解析结果,控制机器人行进速度和涂料供给速度,UART 中断流程如图9 所示。机器人行进方向和电缸运动方向由行进速度和涂料供给速度的正负决定,速度为零表示停止。采用定时器中断定时向机器人本体反馈状态信息。

图9 UART 接收中断流程
实际作业过程中,架空输电线型号、直径种类繁多是现场施工困难的主要原因之一,针对此问题,主要通过机械结构与控制算法相互配合的方案予以解决。第一,在机械结构方面,绝缘包覆头内嵌可调换的输电线包覆夹以适应不同线径的需求;第二,控制系统中,通过大量试验,构建适应不同线径的机器人行走速度与涂料供给速度系列化参数列表,以达到均匀包覆的效果。控制过程如图10 所示。
以无线数据传输过程为例,介绍AC4490 自定义命令解析及控制部分程序代码如下:


图10 控制系统流程


4 试验验证
在地面遥控系统的控制下,对设计的架空线路绝缘包覆机器人进行测试,如图11 所示。绝缘涂料采用3M 的526 单组份绝缘涂料,零距离耐压大于6 kV/mm,遇空气固化,表面固化时间30~40 min,具备强度时间约4 h;测试裸导线选择LGJ7/10 钢芯铝绞线;机器人本体工作电压为直流24V,AC4490设置波特率38 400 B/s,机器人行进速度3 m/min,绝缘材料挤出率330 mL/min,机器人运行平稳稳定,导线包覆厚度均匀,波动范围控制在了2.5~3 mm之间,无露点、无流挂现象。

图11 实际线路测试
5 结语
针对当前配电网架空线路绝缘化改造的客观需求,设计了架空线路绝缘包覆机器人。在地面遥控系统控制下,进行了实际线路测试,结果表明,机器人行进速度与绝缘材料挤出速率平稳,机器人控制系统可靠,可以高效、稳定完成架空线路绝缘化改造任务。
