上肢外骨骼机器人的阻抗控制及关节试验分析
2020-03-04杨铮芃张忠松杨树庆许壮壮王博
杨铮芃 张忠松 杨树庆 许壮壮 王博

摘 要:外骨骼機器人技术的发展,在增强人类肌肉力量并持久地进行繁重负载任务上,取得了极大的进步。以康复医疗为例,上肢外骨骼机器人设计协同运动力学、控制论、图文图像处理技术和生物医学技术,尤其是通过自适应阻抗控制和试验实验,在人表面肌电阻抗调节和关节实验中,被证实为科学、有效的控制方法。本文探讨了上肢外骨骼机器人的控制现状、进一步分析了其阻抗控制效能,分析了关节试验的效果,以为上肢骨骨骼机器人的自适应控制提供可行性借鉴。
关键词:上肢外骨骼机器人;阻抗控制;关节试验
0、引言
随着21世纪智能化时代的到来,人类在物质生活领域的进步,疾病种类和类型也呈增加化趋势。以脑卒中后偏瘫为例,对家庭和社会造成了极大的负担和压力[1]。康复医学为此,通过简单器械配合专业医师指导以满足智能化需求的发展,已不足以满足康复患者的需求;由此上肢外骨骼康复机器人自适应控制系统以达到阻抗控制和关节试验安全性效果的研究,为机器人的控制奠定了基础。现就上肢外骨骼机器人的阻抗控制及关节试验分析如下:
1、上肢外骨骼机器人的控制现状
当前的大多数上肢外骨骼康复机器人主要基于位置控制,如搬运机器人在规定位置的仓库搬运、制定地点装货、设计路线卸货等。在工业现场应用中,该类机器人多以位置控制、速度控制、加速度控制等来完成搬运、焊接、喷漆等工作[2]。从康复医学器械的改进来看,将有效地控制力的输出,实现引入力控的阻抗控制,在动态化分析机械臂末端与环境间的动态关系上,对实现力控制和位置控制的作用效果较为明显;即通过构建一个系统使得执行器(机械臂)能同时控制力/位置。
2、阻抗控制效能
阻抗控制原理和电工电子学中的阻抗概念范畴不同,但本质相同。以机器人物理系统为例,可通过对任意自由度机器人来施加一个力或位移速度,来实现互相耦合的效果。机器人与外界的动态作用调节为阻抗控制的目标,通过外界环境系统的干扰,来实现机器人受外界力而偏离既定运动的扰动响应[3]。具体如图1所示:
注:Md—质量,变大以对环境产生冲击运动,导致轨迹误差大,系统响应慢。
Bd—阻尼=摩擦,变大减小响应力超调,系统响应慢,能量损耗大。
Kd—弹簧作用,距离中心位置越远,受弹力越大。越小表明弹簧刚度系数越小,力控制稳态误差越小,系统响应越慢。
在上肢外骨骼机器人的阻抗控制中,环境刚度大,则阻抗刚度小;环境刚度小,阻抗刚度大,控制的顺应性越好。
以机器人和机电一体化研究所(DLR Institute of Robotics and Mechatronics)研发的机械臂的DLR为例,系统主要包括机械臂本体、机器人控制柜(KUKA Sunrise Cabinet)、示教器(KUKA smartPAD)、安装KUKA Sunrise.Workbench 的开发计算机四大组件。在设计层面,整体增加了机器人触觉,在插孔动作控制上更人性化[4]。具体控制实现方法为—通过增加连杆端的编码器传感器、关节力矩传感器:测量机械臂振动,主动阻尼减震,大幅度提高了机器人的动态运动性能;最短速度检测出与环境的碰撞情况。
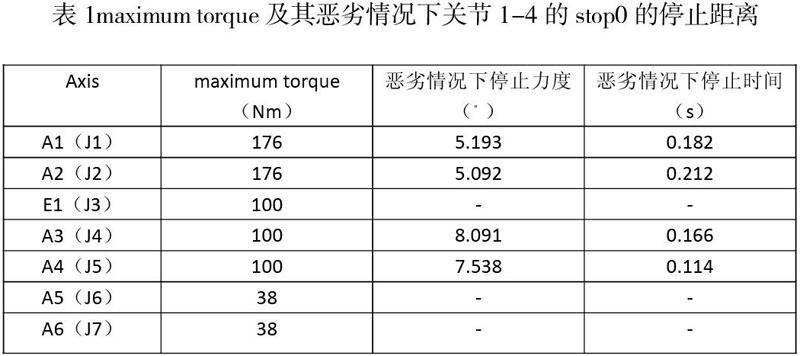
3、关节试验效果
阻抗控制可首先检测出不安全碰撞,将关节力矩传感器精度控制在±2% of the maximum torque,比之无力传感器协作机器人,该机器人的各关节实验结果如下如下表1所示。
鉴于冗余自由度加良好的折叠性及较短的腕部轴使得机器人更加灵巧,以单薄的身体实现12公斤的负载,在机构设计、材料、控制方面更具比较优势。
结束语:
通过分析上肢外骨骼机器人阻抗控制和关节试验,实现了力控、力控机械臂、各种应用的梯队位置,在后续的康复治疗患者中,更具自适应控制优势。
参考文献:
[1]刘冰,李宁,于鹏, 等.上肢康复外骨骼机器人控制方法进展研究[J].电子科技大学学报,2020,49(5):641-651.
[2]孙定阳,沈浩,郭朝, 等.绳驱动柔性上肢外骨骼机器人设计与控制[J].机器人,2019,41(6):834-841.
[3]孙超,苑明海,周灼, 等.外骨骼上肢康复机器人的结构设计与仿真研究[J].机电工程,2019,36(4):383-386.
[4]王峰,喻洪流,李新伟, 等.一种轮椅平台的上肢外骨骼康复机器人的研究[J].中国康复医学杂志,2019,34(7):819-823.
作者简介:
杨铮芃(1999-),男(汉族),福建漳州人,本科,就读于吉林建筑大学 学生,研究方向:工程机械结构设计。
张忠松(1977-),男(汉族),吉林长春人,博士,任职于吉林建筑大学 讲师,研究方向:工程机械结构分析、智能工艺决策。
杨树庆(1997-),男(汉族),甘肃靖远人,本科,就读于吉林建筑大学 学生,研究方向:工程机械结构设计。
许壮壮(1997-),男(汉族),河南兰考人,本科,就读于吉林建筑大学 学生,研究方向:工程机械结构设计。
王博(1998-),男(汉族),吉林集安人,本科,就读于吉林建筑大学 学生,研究方向:工程机械结构设计。
(吉林建筑大学机械工程专业 吉林 长春 130118)
