基于神经网络PID的光伏组件清洁装置姿态控制
2020-03-04卫芃毅任一峰陈昌鑫郭睿栾天
卫芃毅 任一峰 陈昌鑫 郭睿 栾天


摘 要: 针对分布式光伏组件清洁难度大、人工清洁效率低等问题,设计一种新型的基于STM32的光伏组件清洁装置。在装置运行时,由于双电机存在差速,装置会向别的方向偏移,提出以摄像头为主、陀螺仪与编码器结合修正方向,从而达到自主运行的目的;采用神经网络PID算法对多输入系统进行软件编程,并与传统PID算法比较。此设计经过了多次实验验证,得到了大量的数据,对智能光伏清洁、装置规划路径和分布式光伏清洁的发展都有着一定的意义。
关键词: 光伏清洁; 姿态控制; STM32; 神经网络PID; 方向修正; 实验验证
中图分类号: TN711?34; TP273 文献标识码: A 文章编号: 1004?373X(2020)02?0041?04
Attitude control of photovoltaic module cleaning device based on neural network PID
WEI Pengyi, REN Yifeng, CHEN Changxin, GUO Rui, LUAN Tian
Abstract: A new STM32?based photovoltaic module cleaning device is designed to solve the high cleaning difficulty and low manual cleaning efficiency of distributed photovoltaic modules. The device can offset in other directions caused by the differential speed between the two motors while it running, with which the direction correction in combination of the gyro and encoder with the camera as the principal thing is proposed to achieve the goal of autonomous operation. The neural network PID algorithm is applied to program the software of the multi?input system, and compared with the traditional PID algorithm. This design has been verified by many experiments, and a large number of data has been obtained, which has certain significance for the development of intelligent photovoltaic cleaning, device planning path and distributed photovoltaic cleaning.
Keywords: photovoltaic cleaning; attitude control; STM32; neural network PID; direction correction; experimental verification
0 引 言
近年來,我国分布式光伏得到大力发展。分布式光伏电站因其规模小、位置分散、并网等级低,通常建在城市或乡村建筑物的屋顶,因此在光伏板表面会容易落上灰尘与鸟粪。灰尘会使得光伏组件的发电效率降低2%~5%;而鸟粪的存在使得在太阳光的照射下,光伏组件会产生热斑效应,进而损坏光伏组件[1?3]。且通常屋顶不易攀爬,对工作人员的安全难以保障,这对光伏清洁提出了更高的要求。目前光伏组件清洁装置大多采用半自动化方式,未能实现自主运行。基于以上光伏清洁现状,采用履带式双电机机械结构,设计了一种基于STM32的能够自主运行的多传感器光伏组件清洁装置。这对高效光伏清洁有着重要意义。
采用神经网络PID控制算法控制脉冲宽度调制(Pulse Width Modulation,PWM)信号的占空比,进而实现直线行驶、转弯等复杂动作。在实际工作条件下难以按照布线的形式来做巡线设计,在没有了参照的情况下,如何使装置仍能按照预定规划路线行走成为研究的关键[4?6]。
1 硬件设计
1.1 光伏清洁装置总体硬件结构
光伏清洁装置硬件结构由主控制器STM32、行走机构、电源模块、电机驱动模块和传感器构成。主控制器输出PWM信号经驱动模块驱动电机运行;编码器将电机运行的速度以脉冲的形式反馈给控制器;摄像头OV7725与陀螺仪反馈角度的变化,控制整个装置直线行走[7?8]。清洁装置硬件系统结构图如图1所示。
1.2 控制芯片
控制器是整个控制系统的核心,本设计采用STM32作为控制芯片。STM32系列是基于高性能、低功耗、低成本的需求而设计的ARM Cortex内核。有丰富的外设,强大的软件支持,多种芯片型号,最重要的是有固件库这种独特的编程方式,满足了本设计的需要。
1.3 电源管理模块
电源模块为整个系统供电。系统的外部接入24 V电源,根据不同的设备需要工作在不同的电压条件,需要进行调压,各设备的具体工作电压如表1所示。
由表1可知设备主要工作在3.3 V,5 V,7.2 V,12 V等4个电压。选用DC?DC LM2841B降压斩波模块实现调压LM2841B器件是PWM直流/直流降压稳压器。该器件具有4.5~42 V的输入范围,适合各种应用(例如,从非稳压源进行电源调节)。它具有低RDSON(典型值0.9 Ω)内部开关,可实现最大效率(典型值85%)。此外,它还具有550 kHz(X选项)和1.25 MHz(Y选项)的固定工作频率,可在保证低输出电压纹波的同时支持小型外部组件。可通过结合使用关断(SHDN)引脚和外部RC电路来执行软启动,从而方便用户根据特定应用调整软启动时间。电源模块如图2所示。
1.4 直流电机驱动模块
选用英飞凌大功率驱动芯片BTN7971对直流电机进行驱动。BTN7971是大电流(68 A)H桥驱动,有着过热过流保护功能,有效隔离单片机与电机驱动保护 BTN7961 和单片机芯片,防止BTN7961损坏后将电池电压直接输入到单片机,进而烧坏单片机控制引脚。选用2片BTN7971构成H桥能够灵活实现电机正反转,OUT两端直接与电机正负极相连,IN1,IN2接输入PWM信号,通过调节两输入PWM信号占空比来控制电机速度与正反转。驱动电路如图3所示。
1.5 OV7725摄像头
鹰眼摄像头OV7725传感器是一个高性能VGA摄像机和图像处理器,占用空间小。OV7725功能齐全。OV7725包含一个640× 480的图像阵列,可以在VGA模式下以60 f/s的速度运行。在运行时需要对摄像头进行配置,OV7725通过SCCB协议配置内置的172个寄存器。OV7725摄像头传感器外部电路如图4所示。
1.6 其他设备
采用1060线的编码器对电机运行进行测速,将采集到的编码器线数返回单片机,从而可以保证在装置直线行驶时,保持左右速度一致。MPU6050陀螺仪能够实时地将机器人的当前姿态传输给MCU,在实际运行过程中,MPU6050会存在一定的漂移,约为0.2 (°)/min,通过加速度计与地磁校正来减少漂移带来的影响。装置在光伏面板上自主行驶,需要控制自转角与章动角来确定机器人姿态。
2 系统程序设计
2.1 整体程序设计
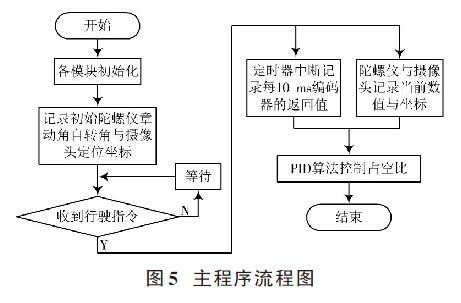
系统的软件设计主要包括摄像头坐标偏离控制、陀螺仪章动角与自转角控制、编码器转速控制。三者共同作用于控制双电机的PWM信号,使其能够自主控制速度与方向[9?10]。另外,对角度校正采取限幅的方式,否则会使得装置在实际运行过程中出现严重偏摆。主程序流程图如图5所示。
在系统初始化之后,将当前陀螺仪自转角与章动角的数值记录下来,并且以此为基准,使系统达到稳定的转速与方向。但是所有的输入都直接控制输入PWM信号的占空比,在改变了装置的转速后,必然会改变装置的方向。系统存在一定的耦合现象,正确处理其中的耦合是程序设计的关键[11?14]。
2.2 神经网络PID控制算法设计
传统的PID控制有着原理简单、易于实现的优点,但是对随机性与非线性系统控制较为困难,对系统的模型化也较困难;而神经网络对于不确定、多输入、复杂系统模型有着很好的应用。选取合适的激活函数,获取大量的数据,对系统训练,使系统有着良好的适应性。将两者结合的优点结合在一起,可以提升系统的稳定性与鲁棒性。设计的神经网络PID如图6所示。
图中y1,y2,y3分别为装置编码器输入、陀螺仪输入和摄像头坐标输入。很明显,三者存在耦合关系,当编码器输入y1改变时,即两轮速度不同,必然会引起装置方向的改变(y2,y3会发生改变),这使得装置的稳定性变差,甚至不稳定。采用三层神经网络,获取一定量的数据,对系统进行训练。输出层为左右两轮的PWM信号占空比。通过比例、积分、微分神经元输出构造正向传递与反向求导。在训练过程中不断更新参数,最后达到能够实现系统的稳定运行。
选取ReLU作为激活函数。相比sigmoid函数有着更快的收敛速度,缺点是容易陷入局部最优点,造成训练后两轮的速度不一致。但是在样本较少,结构简单,面临情况简单的实际条件下,选用ReLU作为激活函数,快速性良好。
3 实验验证
装置在倾斜角度为25°的光伏组件上进行多次实验,得到稳定的数据。通过串口输出相应的数据,将数据用Matlab绘图,绘制PWM信号的响应曲线,并与传统PID比较,得到的PWM信号响应曲线如图7所示。
由曲线可以看出,相较PID算法,神经网络PID算法更快达到稳定,且调节时间更短。在第6 s时,人为加入扰动,使装置偏离原来的航线,可以看到神经网络PID的抗干扰能力更强,鲁棒性更好。
4 结 语
本文设计基于STM32光伏清洁装置和神经网络PID算法。经实验验证,该设计能够将多传感器输入以神经网络PID的方式使装置能够稳定在光伏组件表面行驶,并有着很好的鲁棒性;对装置能够自主行驶,规划路径建立了基础,对智能光伏清洁有着一定的意义。
参考文献
[1] 龚芳馨,刘晓伟,王靓.光伏电站太阳能板的清洁技术综述[J].水电与新能源,2015(5):71?73.
[2] 周扬,吴文祥,胡莹,等.西北地区太阳能资源空间分布特征及资源潜力评估[J].自然资源学报,2010(10):1738?1749.
[3] 温岩,赵东,袁春红,等.积尘对光伏系统发电的影响研究综述[J].太陽能,2014(11):36?41.
[4] 王海峰,李凤婷,贾言争,等.适用于大规模光伏阵列的无水清扫机器人[J].可再生能源,2015,33(10):1439?1444.
[5] WHELAN T, KAESS M, JOHANNSSON H, et al. Real?time large?scale dense RGB?DSLAM with volumetric fusion [J]. International journal of robotics research, 2014, 34(4/5): 598?626.
[6] CHRISTIAN Brecher, STEPHAN Baumler, ALEXANDER Guralnik. Experimental modal analysis using a tracking interferometer [J]. CIRP annals, 2014, 63(1): 345?348.
[7] 孙勇,孙田丰.我国太阳能光伏发电技术应用综述[J].科技创新与应用,2016(27):88.
[8] 侯杰,倪受东.一种光伏清洁机器人的研究与设计[J].机械制造与自动化,2018(6):162?166.
[9] 刘金琨.先进PID控制Matlab仿真[M].4版.北京:电子工业出版社,2016.
[10] 李娟,隋霄.基于RBF神经网络PID控制的SSSC控制器研究[J].控制工程,2018(10):1819?1823.
[11] 刘鹏,田玉平,张亚.有限时间一致无迹Kalman滤波器[J].自动化学报,2018(5):17?20.
[12] 汪伟,谭伦农,杨泽斌,等.无轴承异步电机BP神经网络PID控制[J].电力电子技术,2018(11):26?29.
[13] LIU Qingqian, WANG Bo, MA Xiaowei. The research of intelligent vehicle′s steering control system based on fuzzy control [C]// IEEE Fifth International Conference on Advanced Computational Intelligence. Nanjing: IEEE, 2012: 474?478.
[14] 李大志,高艳,蔡宏,等.基于改進BP神经网络算法的PID参数整定[J].工程与试验,2013,53(2):45?48.
作者简介:卫芃毅(1993—),男,山西长治人,硕士研究生,主要从事控制科学与工程、嵌入式方面的工作。
任一峰(1967—),男,山西太原人,博士,教授,主要从事电气传动与控制、复杂系统仿真与控制方面的工作。
陈昌鑫(1988—),男,河南信阳人,博士,讲师,主要从事动态测控与智能仪器方面的研究工作。
