水位图像识别的场景问题处理方法和技术
2020-03-04江海洋刘林海李红石
江海洋 ,刘林海 ,李红石
(1. 浙江省水文管理中心,浙江 杭州 310009; 2. 杭州海康威视数字技术股份有限公司,浙江 杭州 310051)
0 引言
图像识别技术是人工智能的一个重要领域,是指对图像进行对象处理,以识别各种不同模式的目标和对象的技术。近年来,随着人工智能技术的快速发展,基于人工智能图像识别技术的水位监测技术成为研究热点[1]48[2][3]1。与传统水位测量相比,基于人工智能图像识别技术的水位监测技术具有直观、建设成本低、测量方式高效等优势。但由于水本身特性及野外复杂的光照环境,基于人工智能图像识别技术的水位监测技术并未在水利行业中推广应用。对图像识别技术存在影响的场景因素主要有:水面波浪、水面倒影、水体透明、逆光、太阳阴影、夜间补光过曝、水尺脏污等。
杭州之江水文站是国家重要水文站,水文及光线环境复杂,因此选择在该水文站试验人工智能图像识别技术,以解决由水本身的特性和野外现场环境应用的复杂性带来的多个技术难题,使该技术实用化。
1 实现原理
基于人工智能图像识别技术的水位监测原理已经有了不少的研究[1]48[3]2,实现原理如下:摄像机获得原始图像后,进行射影变换,采用 Otsu 法(最大类间方差法)计算得到二值图像,再采用形态学处理后通过 Canny 算子得到一个有效边缘值,确定水位坐标值,最终利用平滑算法去除随机差值。
为解决场景适应性问题,增加了 1 个步骤,即摄像机获得原始图像后,首先通过深度学习算法在图像中检测出水尺,再进行射影变换。深度学习是机器学习的一个分支,是指在多层神经网络上运用各种机器学习算法解决图像、声音文本等各种问题的算法集合,其核心是特征学习,旨在通过分层网络获取分层次的特征信息,从而解决以往需要人工设计特征的重要难题。通过对大量的水尺素材进行训练学习,摄像机自动提取水尺的特征,从而在图像中能检测出水尺。
2 试验应用系统
2.1 试验点概况
本次开展应用试验的站点杭州之江水文站是经水利部批准的全国首批国家重要水文站,站址位于富春江、浦阳江和钱塘江三江交汇处下游 3.5 km,杭州市西湖区双浦镇外张村的钱塘江北岸大堤上,集水面积为 41 769 km²,占钱塘江整个流域面积的 75%。
之江水文站设有竖井式水位台,并安装了 1 套浮子式自动水位监测系统,在栈桥的 2 个支撑墩之间固定了 5 m 的水尺。
该试验点场景条件丰富,影响因素多,在测试过程中,受到水体特性和现场外部场景环境等多重因素的影响。
2.2 试验站组成
试验站人工智能图像识别系统主要组成如下:
1)高清智能摄像机。采用 200 万像素水尺读取智能球形摄像机,摄像机内置水尺读取智能算法并支持深度学习,能将读取到的标准水尺图像直接转化成水位数据。
2)水尺。采用采样尺寸为 1 000 mm×80 mm 的标准水尺,水位读数精度为 1 cm;水尺材质为不锈钢,表面有乳白色油漆,标志和数字为黑色,在可见光波段下刻度清晰可辨,在夜间近红外波段下也具有较高的对比度。
3)平台。水位数据及视频图像上传到 2 个平台:水位数据上传到浙江省水利防汛通信平台,方便对数据的查看与统计分析;视频和图像则上传到视频中心平台,当数据出现异常时,方便利用视频图像分析原因,并与人工观测数据进行比对。
4)4G 通信网络。人工智能图像识别系统将采集到的水位数据和图像,按 SL 651—2014《水文监测数据通信规约》格式封装传输到平台。通信模块采用 TD-LTE 制式的 4G 网络通信模块,下行链路速度为 100 Mbit/s,上行链路速度为 30 Mbit/s,完全满足高清智能摄像机实时传输水位数据、图像和视频的要求。
试验站人工智能图像识别系统的结构如图 1 所示。
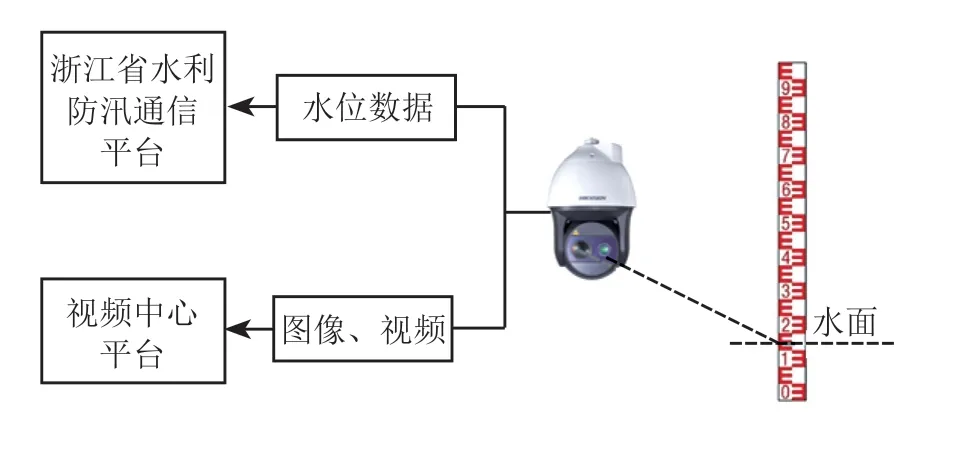
图 1 试验站人工智能图像识别系统
3 场景问题处理技术
场景问题分为 2 类,一类是水体特性带来的影响,另一类是现场应用场景的影响。
3.1 水体特性影响
1)水面波浪的影响。水面会有波浪上下起伏,不可避免会带来较大的随机误差。GB/T 50138—2010《水位观测标准》对此作了规定[4]35,有波浪时,可采取下列方法尽量减少因波浪产生的误差:利用水面的暂时平静进行观读,或者观读峰、谷水位,取其平均值;多次观读,取其平均值。
采用摄像机识别水位时,如果采用基于单张图片的识别方法,不可避免会产生较大的随机误差。为此,采用类似于人工多次识别取平均值的方法,即:在一定的时间内,截取 n 帧(在算力允许范围内,截取的帧数尽可能多),对每帧进行水位识别,获得波峰和波谷水位值,然后取平均。
在计算水位的基础上,再采用滑动平均的方法,进一步降低波浪随机误差的影响。
2)水面倒影的影响。平静的水面会出现水尺清晰的倒影,从而严重干扰图像识别,难以找到准确的水位线,原始图像如图 2 所示。
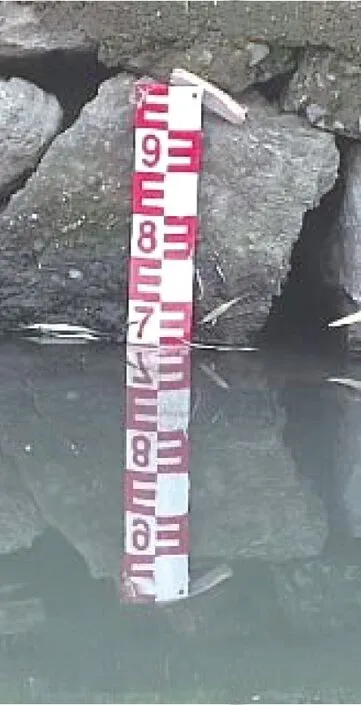
图 2 原始图像
黄萍萍等[5]对水岸线以下的图像进行了区域分割处理的研究和试验,以亮度、饱和度、纹理特征、边缘检测和区域生长等几种检测水面倒影的方法,都很难达到满意的程度。
通过研究,从算法层面上解决该问题难度很高,因此通过对光线的特性研究,结合摄像机的硬件及光学机构,使水面部分看起来较“暗”,这样可避免后续形态学处理的错误,提升算法的水位线识别率。改进后的图像如图 3 所示。

图 3 改进后的图像
3)水体透明的影响。水体透明度高,图像中很难找到清晰的水位线,找到的水位线比实际水位线低。在实际试验中,水体浊度在洪水期、枯水期,以及钱塘江的涨潮落潮期反复变化,图像识别的水位比真实水位低 2~12 cm,故不能采用固定补偿的方式加以修正。
解决的办法类似于水面倒影的解决办法,通过对光线的特性研究,结合摄像机的硬件及光学机构,使水面部分看起来较“暗”,透明部分也看起来较“暗”,从而降低水体透明的影响。通过持续的实际测试,图像识别的水位与真实水位的误差控制在±2 cm,不再出现明显偏低的现象。
3.2 现场应用场景影响
1)逆光影响。水尺安装在水位测井、立柱或垂直河岸边,由于背景较大,水尺曝光正常。但直立在水中央的水尺在逆光的情况下,易出现水尺表面曝光不足导致图像过暗,无法识别出水位线位置的情况,如图 4 所示。通过改进摄像机的曝光算法,由平均曝光改为水尺的区域曝光后,可正常识别出水位线位置。

图 4 逆光下曝光不足
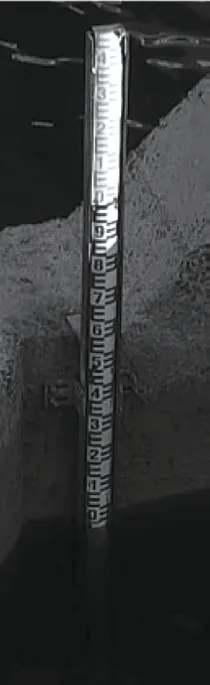
图 5 太阳阴影的影响
3)夜间补光过曝。夜间无光的情况下,要获取水尺图像必须进行补光。摄像机自带的红外灯可进行补光,最大补光距离达到 200 m,可满足夜间水位监测的需要。但对直立在水中央的水尺补光时,由于水尺占整个图像的面积较小,再加上水体吸光对补光的光线吸收率很高,水体背景较暗,极易导致水尺补光过曝,过爆影响如图 6 所示。过曝带来的问题,一方面是水尺特征失去,深度学习无法进行识别;另一方面是水面太亮,导致水体透明度的影响加大。解决办法和逆光相同,也是采用区域曝光的方法解决夜间补光过曝的问题。
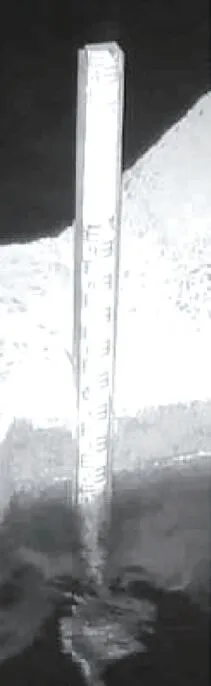
图 6 过曝影响
4)水尺脏污。实际使用过程中,水尺不可避免会出现脏污。如洪水过后,会在高水位处有污泥或油污黏住,或者在水尺中间有水草、塑料袋等挂住。不仅水尺脏污,拼接的 2 根水尺之间的接缝过大,相邻 2 根水尺的批次不一样亮度差异明显,都会导致水位线错误的识别,影响如图 7 所示。通过深度学习的算法,对水尺进行完整的识别,当脏污的部分下面还有水尺刻度和数字时,则不认为脏污部分就是水位分界线,而是继续往下寻找,直到找到正确的水位线。
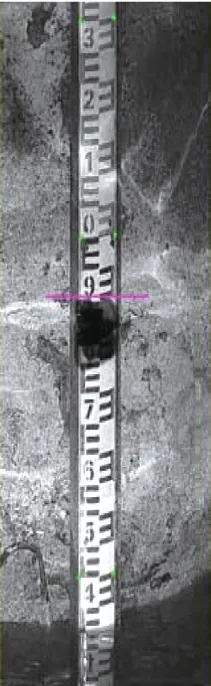
图 7 水尺脏污的影响
4 试验结果分析
4.1 比测资料收集
2019 年 10 月 23 日在之江水文站完成摄像机安装、水尺更换、系统调试,并校对浮子式水位计和摄像机时间。浮子式水位计和视频识别的水位数据均自动上传到浙江省水利防汛通信平台。24 日起正式开始比测。
摘录到 2019 年 11 月 5 日为止共 13 d 的浮子式水位计和水位图像识别系统的整点水位数据,与此同时采用视频人工观测的整点水位作为真值。由于断电等原因,部分时段无数据,共获得 273 组整点有效数据。
由于钱塘江存在潮涌现象,比较结果覆盖了2.64~5.41 m 的高、中、低水位。
4.2 允许误差规定
GB/T 50138—2010《水位观测标准》[4]26第 6.2 节规定,比测结果应符合下列规定:一般水位站,置信水平 95% 的综合不确定度应为 3 cm,系统误差应为 ±1 cm;波浪问题突出的近海地区水位站,综合不确定度可放宽至 5 cm。
除了上述两项平台系统的功能之外,精品课程的在线申请系统同样也是高校教学资源库平台中的一项重要组成部分。目前,我国部分地区的高校在教学管理过程中,新增了一些特色专业的特色课程。此类院校在进行内部高校教学资源库平台设计时,基于JavaEE系统,将更多的精品课程申请流程纳入系统平台中。
4.3 比测误差分析
系统误差 Xy"、随机不确定度 Xy'、综合不确定度 Xz分别按照 GB/T 50138—2010《水位观测标准》[4]68-69附录 E 中 E.0.6 的公式进行计算,计算公式如下:
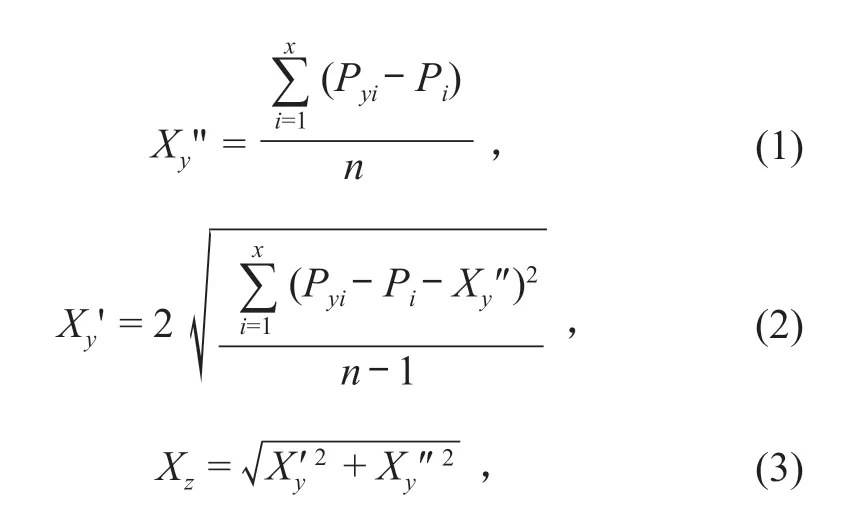
式中:Pyi为自动监测水位;Pi为人工校测水位;n 为比测次数。
根据比测资料进行计算, 计算得到的系统误差、置信水平 95% 的综合不确定度分别为 -0.88,4.27 cm。
由于之江水文站受潮汐影响较大,按照 GB/T 50138—2010《水位观测标准》[4]26中波浪问题突出的近海地区水位站的标准,测试结果的系统误差和置信水平 95% 的综合不确定度分别满足 ± 1 和 5 cm 的要求,但综合不确定度不满足 3 cm 的要求。
为了对比浮子式水位计,对之江水文站的浮子式水位计监测数据也同时进行误差分析,计算得到的系统误差、置信水平 95% 的综合不确定度分别为 0.25,4.46 cm。
可以看出,由于之江水文站受潮汐影响较大,即使是安装在测井中的浮子式水位计,综合不确定度同样只能满足波浪问题突出的近海地区水位站的 5 cm 的要求,不满足 3 cm 的要求。
对数据进行进一步分析,水位图像识别系统的偶然误差为 -22~1 cm,而浮子式水位计的偶然误差为 -18~5 cm。无论是水位图像识别系统还是浮子式水位计,偶然误差小于等于 -5 cm 或大于等于 5 cm 均发生在涨潮开始的 2 h 以内。将涨潮 2 h 以内的数据去除,重新统计,结果如表 1 所示。
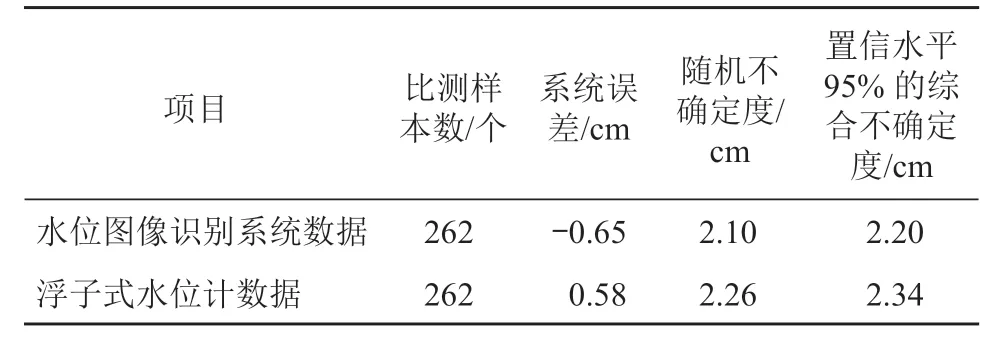
表 1 去除涨潮影响后水位图像识别系统与 浮子式水位计比测结果
测试结果表明,在去除涨潮时段数据后,测试结果的系统误差和置信度为 95% 的综合不确定度分别满足 ±1 和 3 cm 的要求。
水位图像识别系统与浮子式水位计相比,系统误差相对较大,但置信水平 95% 的综合不确定度则优于浮子式水位计。
4.4 优势分析
与传统的水位测量方法相比,本次试验的智能图像识别水尺系统具有以下特点和优势:
1)建设成本低。智能图像识别系统主要依靠高清摄像机,固定在岸边一侧的站房或立杆上,免去了传统水位测量的基础土建工作。
2)智能化程度高。将人工智能的深度学习功能和优化的算法都集成到前端高清智能摄像机上,实现水位与图像视频监测的双重监测功能。
3)精度较高。对光学系统和测量算法进行了优化,解决了水体透明度、阴影、倒影、太阳耀光等多重干扰。通过 6 个月的优化和连续 13 d 的比测,结果表明,人工智能水位图像识别系统完全满足 GB/T 50138—2010《水位观测标准》的要求。
5 结语
试验优化过程也表明,采用传统的灰度阈值判断的图像识别算法,结合摄像机在曝光、硬件和光学结构上的优化,并不能完全应对水位监测的复杂场景,例如太阳阴影、水尺脏污等,只有将传统的图像识别算法,结合最新的深度学习对水尺进行综合判断,才能使图像识别技术用于水位监测的实际场景。
在人工智能识别系统安装、调试、使用过程中,还需注意以下几点:
1)为保证系统满足水位测量精度的需求,水尺片采用标准的白底及纯蓝和纯红字体及标识,夜间红外补光条件下也应有良好的对比度。
2)尽量选择靠墙安装。摄像机与水尺正面的夹角不超过 15°,读取水尺时俯视角不超过 20°,与水尺的最大距离不超过 50 m。
3)水尺被淹没或者露出的水面尺寸小于 20 cm时,摄像机无法读数从而出现错误的数据,因此,水尺的长度应保证比最高水位高出 20 cm 以上。
4)漂浮的垃圾对水尺的图像识别也会造成较大的影响,水尺安装应避开漂浮物易聚集的地方。
基于人工智能图像识别技术用于水位监测研究和开发的时间还比较短,随着今后人工智能技术的进一步发展,该技术的稳定性和准确性将会进一步得到提升,不仅适用于常规直立式水尺,也将能适用于倾斜式水尺等多种应用场合,甚至可实现无水尺水位的监测。
在实际应用中,采用 5 s 的数值平滑不足以消除风浪的影响。要降低风浪下的不确定度,在算力允许的条件下应取更多帧平均,使数值平滑进一步延长。后续还可从系统算力、算法、图像畸变校正、更精细化曝光等方面进一步优化以提高准确度。同时由于水位监测多在野外,基于人工智能图像识别技术的水尺摄像机也需要降低功耗,可在野外无市电的情况下采用太阳能电池板供电。
