基于机器视觉的分拣技术研究概述
2020-03-03杨赛张鹏博
杨赛 张鹏博


摘 要:机器视觉在近几年发展非常迅速,并渗透于各个行业中,极大地提高了工作效率。本文对机器视觉的整体结构布局进行了介绍,详细介绍了图像识别部分软、硬件设备和相关算法,介绍了该技术在零件分拣领域的应用,并对机器视觉技术今后发展做出展望。
关键词:机器视觉;图像处理;视觉分拣;图像预处理
中图分类号:TP391文献标识码:A文章编号:1003-5168(2020)34-0031-03
Overview of Sorting Technology Research Based on Machine Vision
YANG Sai ZHANG Pengbo
(School of Mechanical, North China University of Water Resources and Electric Power,Zhengzhou Henan 450045)
Abstract: Machine vision has developed very rapidly in recent years, and has penetrated into various industries, greatly improving work efficiency. This paper introduced the overall structure layout of machine vision, introduced some software and hardware equipment of image recognition and related algorithms in detail, and introduced the application of this technology in the field of part sorting. The future development of machine vision technology was prospected.
Keywords: machine vision;the image processing;visual sorting;image preprocessing
机器视觉在最近20年里发展非常迅速。2017—2020年,在中国制造2025的推动下,中国机器视觉市场增速预计将保持在20%左右[1]。特别是随着相机、半导体及大规模集成电路的发展,机器视觉被广泛应用于机械加工、医学、计算机、农业等领域。
1 视觉图像处理结构
1.1 整体结构
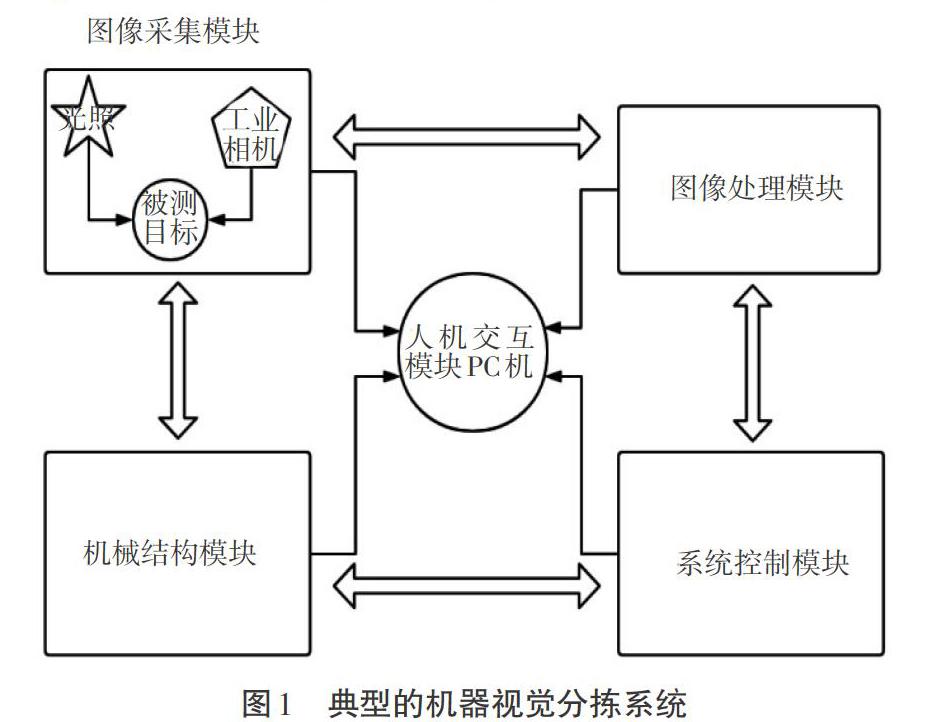
对于一个典型的机器视觉分拣系统,其整体结构可以划分为图像采集模块、图像处理模块、机械结构模块、系统控制模块、人机交互(可视化)模块。当被测目标通过机械结构(如传送带)输送到工业相机的检测范围时,被测目标会被光源照亮,工业相机进行拍照[2]。拍完的图像传递到图像处理模塊进行处理,然后系统控制模块根据处理后的图片信息对被测目标进行分拣分类,并将结果显示在人机交互界面上,所有的处理过程都是在PC机控制下完成的。典型的机器视觉分拣系统整体结构如图1所示。
1.2 子系统
本文主要对典型的机器视觉分拣系统图像采集模块和图像处理模块进行详细分析。
1.2.1 图像采集模块
1.2.1.1 光照源。目前,市面上的光照源主要可分为卤素灯、荧光灯、LED灯三种,选择一种合适的光源能极大减少后续对图像的处理工作,并且能提高系统的准确度。表1对这几种光源进行了比较。
1.2.1.2 工业相机。工业相机犹如人的眼睛,采集到的数据信号发送给图像采集卡。常用的工业相机有CCD(见图2)和CMOS相机(见图3),二者的区别是采用不同的感光芯片。CCD相机有线阵式和面阵式两种,其成像质量较高,但因工艺复杂,导致成本较高。CMOS相机色彩还原能力弱,成像质量差,但耗电低,价格相对CCD便宜。
1.2.1.3 光学镜头。镜头通过光学成像,决定着成像质量的好坏,镜头要与选取的相机相匹配。在选取镜头时,要着重考虑其分辨率、焦距、视野角度。
1.2.2 图像处理模块
1.2.2.1 机器视觉编程语言及开发软件。大多数编程语言如C++、C#、python、Visual basic等适用。主流的机器视觉图像处理软件包括MATLAB的图像处理工具箱(Image Processing Toolbox)、OpenCV、LabVIEW、HALCON等。
1.2.2.2 图像预处理操作。图像预处理操作包括以下内容。
图像增强处理:将图像进行均衡化处理,以使图像灰度分布均衡,缩小图像灰度差异。
图像滤波处理:受外界因素干扰,采集到的图像会产生图像噪声,如椒盐噪声,可通过滤波处理消除噪声。田晓东、张晓峰、孔侃等的研究中给出了中值滤波、形态学滤波、均值滤波、高斯滤波、小波变换、自适应滤波等多种滤波处理方法[3-5]。
图像分割处理:根据图像某方面的相似性将其分割开,这是图像处理的关键步骤。传统的图像分割方法有单阈值分割法、多阈值分割法和大津法。另外,姜枫等人还提出了基于内容的图像分割方法[6]。
图像边缘检测:边缘检测也属于图像分割的一种,里面包含了很多算子,不同的算子原理不同,最后得出的图像边缘效果也不尽相同。一阶微分算子有Prewitt、Sobel、Roberts等,二阶微分算子有Marr、Laplacian、Canny。
2 机器视觉分拣技术的应用
由于机器视觉分拣技术在各个领域内都有独特的优势,因此几乎各个领域都有其身影。
Jahanbakhshi Ahmad等人選取56个规则的和79个不规则的胡萝卜样品进行视觉处理,通过一系列图像处理后,根据胡萝卜的形状特征成功地将胡萝卜进行筛选分类[7]。
由山东大学和山东农业大学设计的一种小型的自动识别分拣系统,通过小型机械手臂可以实现多种小物件的识别分拣,分类成功率接近98%[8]。机器视觉机械手测试平台如图5所示。
Keyur D. Joshi等人提出了一种支持向量机和神经网络混合的方法,并成功设计出了一种零件分拣系统[9],整体结构如图6所示。在传送带上可对硬币、齿轮和引脚管进行自动识别并分拣。
Wisam T. Abbood等人设计出一种可以识别物体颜色、形状及位置的可视化机器视觉系统[10]。颜色识别采用HSV(Hue、Saturation、Value)模式进行色彩分选,该系统结构见图7。大致流程为,相机采集图像后在PC上进行相应算法处理,然后Arduino微控制器根据处理信息控制机械手对物体进行分拣。
3 结语
本文主要分析了机器视觉的整体结构,并列举了一些机器视觉分拣技术的例子。目前,机器视觉发展非常迅速,相应的硬件、软件技术日趋成熟,笔者认为,该技术仍然存在较大的发展空间。比如,在机械行业中要进一步提高对高精尖零件的检测精度,大多数视觉检测系统只能针对某一特征物体进行检测,不能对多种特征、多种物体同时进行检测,难以达到检测精度高、效率高的目的。
另外,图像处理过程中去噪和特征提取相关算法可以进一步改善,使图像的处理和特征提取效果更加明显,从而提高机器视觉的识别精度。
参考文献:
[1]阮晋蒙.机器视觉:让中国制造2025“看”得更远[J].新经济导刊,2017(Z1):80-83.
[2]傅田.基于机器视觉的带式输送机纠偏系统设计[J].煤矿机械,2020(8):183-185.
[3]田晓东.声呐图像滤波方法的比较分析[J].声学与电子工程,2007(1):22-25,30.
[4]张晓峰.基于视觉的齿轮检测及相机标定方法研究[D].合肥:合肥工业大学,2018:12.
[5]孔侃.螺母机器视觉检测与筛选系统研究与设计[D].赣州:江西理工大学,2013:23.
[6]姜枫,顾庆,郝慧珍,等.基于内容的图像分割方法综述[J].软件学报,2017(1):160-183.
[7] Jahanbakhshi A,Kheiralipour K . Evaluation of image processing technique and discriminant analysis methods in postharvest processing of carrot fruit[J]. Food ence & Nutrition,2020(3):1-7.
[8] Zhou K , Meng Z , He M , et al. Design and Test of a Sorting Device Based on Machine Vision[J]. IEEE Access, 2020(99):1.
[9]Joshi, K.D., Chauhan, V. & Surgenor, B. A flexible machine vision system for small part inspection based on a hybrid SVM/ANN approach[J]. Journal of Intelligent Manufacturing,2020(1):103-125.
[10] Abbood W T , Abdullah O I , Khalid E A . A real-time automated sorting of robotic vision system based on the interactive design approach[J]. International Journal on Interactive Design and Manufacturing,2020(3):201-209.
