无人驾驶汽车激光雷达脉冲信号抗干扰技术研究
2020-03-02孙文明
孙文明

摘 要:在无人驾驶汽车(简称无人车)环境感知系统中,激光雷达完成了对周围环境的三维空间感知60%-75%的信息获取,是实现汽车无人驾驶技术的关键传感器。当无人车在道路上行驶时,激光雷达很可能被其他车辆发出的激光脉冲信号或人为因素所干扰,导致车辆误判或漏判,造成极为严重的后果。本文在深入分析了车载激光雷达常见干扰形式后,提出了相应的抗干扰措施。
关键词:无人驾驶汽车 车载激光雷达 串扰 串码
Research on Anti-jamming Technology of Laser Radar Pulse Signal for Driverless Car
Sun Wenming
Abstract:In the environment detection system of driverless cars, laser radar completes the information acquisition of 60%-75% of the three-dimensional space perception of the surrounding environment, which is a key sensor to realize the technology of self-driving cars. When driverless cars are running on the road, the laser radar may be interfered with by laser pulse signals or human factors from other vehicles, leading to misjudgment or missing judgment of vehicles, resulting in extremely serious consequences. After analyzing the jamming types of laser radar in depth, the article put forward corresponding anti-jamming measures.
Key words:driverless cars, vehicular laser radar, crosstalk, the string of code
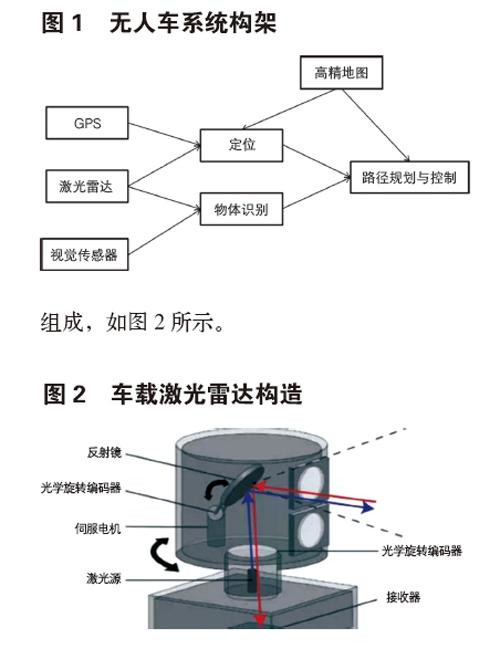
无人车在行驶过程中需要对周围环境信息进行实时获取并处理。相比无人驾驶技术组成单元中的其他类型传感器,激光雷达探测的距离更远,精度更高,使得谷歌、百度、Uber等主流无人车研发团队均使用激光雷達作为环境感知与定位传感器,与图像识别等技术搭配,使无人车实现对路况的判断。作为无人车安全和智能性的重要保障,车载激光雷达的运行稳定性极为关键。
1 车载激光雷达工作原理
1.1 车载激光雷达作用
激光雷达是激光探测与测距的简称,通过点云建立周围环境3D模型。为了精准检测复杂环境,激光雷达需要与多种传感器组合使用。与视觉传感器组合,不仅可以识别物体,还能实现目标空间测距、目标图像识别等功能;与GPS定位组合,可实现车辆所需的高精度定位[1]。
1.2 车载激光雷达组成
车载激光雷达一般由激光发射器、接收器、信号处理单元和旋转机构四大核心部件组成,如图2所示。
1.3 车载激光雷达工作原理
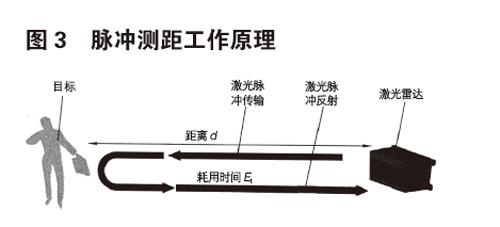
(1)测距原理
激光雷达测距方法主要分为三种:脉冲测距、相位测距和三角测距[2]。因脉冲测距法测量范围大、测量速度高、抗光干扰能力强,可实现厘米级精度的测量,目前无人车搭载的激光雷达基本上均采用这种测距方法。
无人车行驶时,激光雷达以一定的角速度ω匀速转动,此时脉冲激光发射器向外发射一系列重复周期的高频窄脉冲(脉冲宽度小于50ns),激光脉冲到达目标表面后被反射。通过测量激光脉冲折返时间,计算激光雷达与目标对象的相对距离。
(2)测速原理
车载激光雷达不仅需要检测周围环境中运动物体与无人车之间的实时距离,还需要测量目标物体与车辆的相对速度,可以采用多普勒频移测速的方式求得。
假设激光雷达与目标物体之间的距离为S,则激光脉冲到达目标并且返回的全程中,波长λ额总数为,每个波长对应的相位变化,全程传播路径总相位变化为:
如果目标相对激光雷达运动,S和相位随时间变化而变化,计算相位与时间的导数,可得角频率为:
为多普勒频移,计算公式为:
因此,只要测量出多普勒频移,即可确定目标物体与激光雷达之间的相对速度,从而从计算出前方目标物体的实际速度。
2 车载激光雷达信号干扰类型
无人车在行驶过程中,路旁的灌木、杂草、雨雪雾、玻璃、道路上的各种障碍物以及日光影响下APD产生的散粒噪声,并不会形成激光雷达的干扰源,这些都属于汽车周围的环境,可以通过优化算法识别探测。真正对激光雷达产生干扰的,是其他车辆发出的激光脉冲信号或人为因素造成的干扰,激光雷达无法判断是否为自己发出的脉冲光[3-7]。汽车接收到错误信号后,极易误判或漏判,严重者会造成交通事故。
常见的车载激光雷达信号干扰形式有:
(1)串码及黑客攻击。如果车载激光雷达发射的信号未被编码、加密,当无人车行进时,黑客只需一台激光发射器或计算设备(Arduino或RPi),对着无人车发射强幅度、高频率的光源辐射,即可将激光雷达所有探测器全部饱和至失效,导致车辆无法正常工作;或者发送虚假信号,对无人车激光脉冲信号进行概念性攻击,针对目标车辆进行控制;无人车为了准确识别路况,需要实时更新高精地图,如果黑客把下载后的准确地图替换掉,将会造成定位失效[8]。
