三坐标测量机安全点的设置方法及应用
2020-03-02唐睿琳林新星赵辉
唐睿琳 林新星 赵辉
摘 要:本文阐述了如何在使用三坐标机测量过程中用不同方法对安全点(CLP)进行编程设置及使用,以便于三坐标测量机在测量过程中建立自动化安全路径,从而在测量批量大或结构复杂的产品时充分满足测量路线安全,从而有效提高三坐标测量机自动化程度,缩短测量时间提高工作效率。同时通过对不同被测元素安全点(CLP)的建立方法的不同选择,可以有效使被测元素的数据采集点始终在其法向矢量方向,这样可以有效保证采集数据的准真,便于对产品数据进行分析,对产品质量进行改进。
关键词:安全点 三坐标 路径 测量程序
中图分类号:TH71 文献标识码:A 文章编号:1674-098X(2020)08(a)-0086-03
Abstract: This paper describes how to program and use the safety points in the measurement process using CMM, so as to establish the automatic safety path in the measurement process, so as to fully meet the three principles of safety of measuring route, thus effectively improve the degree of automation of CMM, shorten measuring time and improve working efficiency. At the same time, the data acquisition points of the measured elements can always be in the normal vector direction through the different selection of the methods for establishing the security points of the different measured elements, which can effectively guarantee the accuracy of the collected data, facilitate the analysis of the product data and improve the product quality.
Key Words: Safety; CMM; Path; Measurement routine
三坐标测量机在测量中为了能使测量程序自动完整的运行,保证测量过程的安全除了设置测量点外,还要设置必要的安全点(CLP点),只有将安全点合理地设置组合成安全路径才能极大地缩短测量时间,保证测量过程的通畅和测量安全,因此安全点的科学设置是三坐标测量的一项重要工作,安全点的设置是自动化测量的重要组成部分。
1 安全点的意义及特点
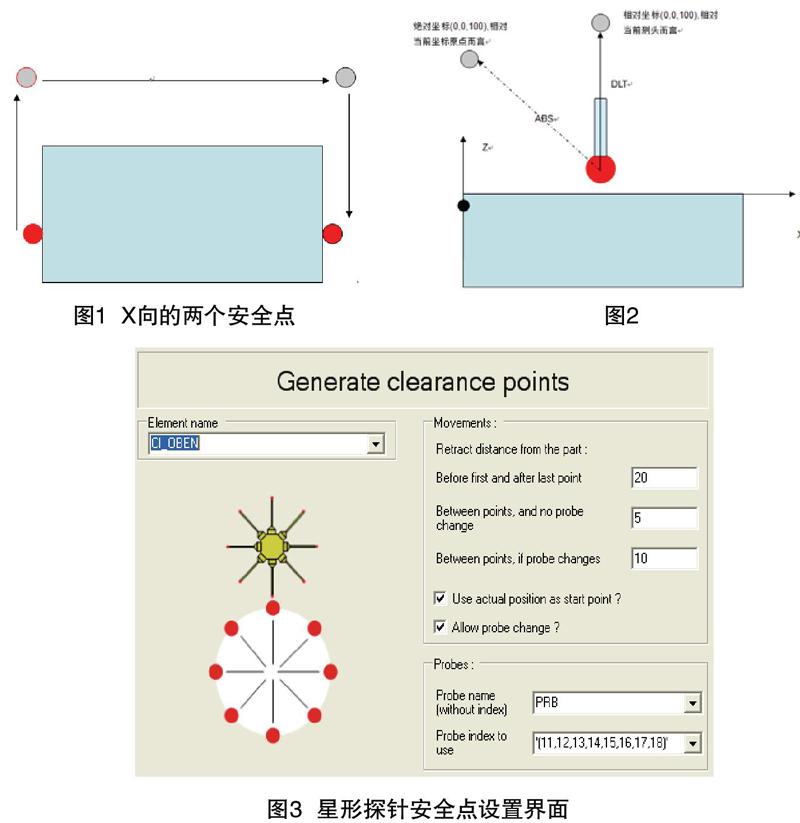
安全点(CLP点)是三坐标在测量过程中组成安全有效路径的基本单位,为了测量过程自动高效运行,保护仪器不被碰撞而对工件外型情况进行不接触采点。如图1所示。
点是测量点。其中安全点在X方向包涵两个。从图中还可以了解安全点(CLP)的特点:只测量,不计算也不评价。此两个安全点可以在仪器X方向自动形成安全路径,用以保证批量检测时三坐标仪器可以自动安全高效测量。
2 安全点的设置方法
在QUINDOS7软件中,生成测量元素的理论点时,都有一个安全距离设置的选项,但是这种情况下生成的安全点(CLP)是在测量元素的法向方向,存在一定的局限性,对于我厂生成的各種工件如:构架、机体、曲轴、凸轮轴等,其形状复杂难以通过这种方式满足测量要求。本文主要讨论在测量元素的其他方向和测量路径中加入安全点(CLP)的几种方式。
2.1 通过命令MEPNT生成安全点
其语句形式为MEPNT(NAM=MA-PNT,CSY=CMMA$CSY)该语句意思是点测量,但可以将测量界面时在模式(MOD)中只选“测量”,其他不勾选,进入测量界面后在安全的位置点点击操作面板上的“CLP”键来完成安全点的设置。完成后将该程序自动运行一遍后,此安全路径被自动记录并运行,这种设置方法适用于外型复杂工件和小工件。其优点是设置过程方便直观,设置方法简单易学,设置时容易找到最短有效距离。而缺点是如果在自动测量过程完成后对某被测要素进行重复测量时要对该被测元素的安全点进行重新确认,以保证测量安全。
2.2 通过命令MOVCMM生成安全点
其语句形式为MOVCMM(TYP=DLT, DST=(0,0,100)该命令是在元素外插入安全点,三个数值分别代表(X,Y,Z)坐标其主要分两类情况:第一种是绝对坐标(ABS)方式,即相对于当前坐标系的原点移动到绝对坐标值处;第二种是相对坐标(DLT)方式,即相对于当前测头而言往坐标系的某个方向移动一定距离。这种安全点的设置方法适用于大型工件外形规则,而且在设置应注意时使用绝对坐标还是相对坐标,如果坐标方式选择不当对坐标测量机来说结果将是灾难性的。如图2所示:从图中可以看出第一种安全点选择方式是相对于坐标原点而言,它的回退方向是斜向;第二种方式是相对测头而言它的回退方向是垂直于测量方向,我们通常采用第二种方式。这种安全点的设定方法,其优点是在大型规则产品测量时各组探针走位清楚,尤其在测量对称元素时可以节省大量编程时间,而且可重复测量单一被测元素,不用担心安全路径是否安全。但缺点是在编程时一定要牢记坐标系位置,安全点一旦设定,在以后的测量过程中不要改变产品坐标系的建立方法,否则将带来灾难性后果。
2.3 通过命令MECOL生成安全点
其语句形式为MECOL(NAM=CLP-XCSY=CSY(2)),该方法与第一种方法近似这种测量方式也是只测量、不计算、不评价,这种方法比较适合手动测量时使用其对话窗口。
2.4 使用星形探针时的安全点设置
星形探针在使用时安全点设置方式和其他方法有所不同,它的设置和使用如图3所示。
该方法主要适合用在自回转中心的产品上,比如柴油机缸套、水套、车轴、等深孔或长圆柱体。其使用时可先确定产品一个坐标轴其他坐标轴可以自定义机床坐标系因为要用至少四根探针对同一被测元素所以在每个探针转换时要设定安全点和安全距离。图3是人机对话框在图中:第一个距离,为起始点和终止点的安全距离,即探针距离第一个探测点和最后一个探测点的垂直距离,此点只采点不评价;第二个距离,是测头没有更换时每个(CLP)点距离测量点的安全距离。第三个距离是更换探针时每个(CLP)点距离测量点(数据点)的安全距离。用这种方法设置安全点时需要注意,当测量内尺寸,如内圆、内圆柱时,应该把安全距离设置为负值,当测量外尺寸,如外圆、外圆柱和球时,应该把安全距离设置为正值。第四,探针选择窗口。示例:以280缸套为例,缸套是深孔薄壁件,长620mm孔径280mm
在测量时编程如下:
STARPRC(校验星型探针)
BLDCSY(建立坐标系)
AUTOELE(自动测量被测元素)
GENCYL(缸套深孔生成)(NAM=CYL_A,X=0,Y=0,Z=-40,DIA=280,NPT=32.......)
GENCLP(星型探针安全点)(NAM=CYL_A,DIS=(-5-5-10)PRB=(11,12,13....18))該语句中因为使用了8根探针因此要在PRB中设定,由于缸套是内孔所以安全距离(DIS)要设置为负号。
MECYL(测量生成圆柱)此方法特别适用星型探针测量,在测量缸套等深孔产品时可大幅提高检测效率,节约检测成本。但该方法只适用于自回转中心产品,使用范围不广泛。
在测量程序中加入安全点,测量复杂大型产品时,由于产品结构狭小,探针在测量时为了不干涉测量点往往会在生成元素(GEN)程序后,将此程序屏蔽,然后打开测量元素(ME)程序在测量程序中直接加入安全点。此安全点设置时是将产品在空间位置确定后在其X,Y,Z坐标上输入适当距离,使其空行程距离最短,又能保证仪器的顺利测量,同时保证自动化测量的安全和准真,此方法是测量中常用方法适用于各种测量程序但用该方法时应注意:第一应将生成元素(GEN)程序屏蔽,如果不屏蔽的话将无法在测量程序中加入安全点。第二加入安全点后应选择慢速自动运行一遍,以确定安全点是否真的安全。示例:
GENCIR(生成圆)(NAM=CIR_1,X=0,Y=0,Z=10,DIA=360,NPT=8......)按回车键生成
然后在MECIR(测量圆)中打开子目录,在人机对话框中(X,=...Y=...Z=...)直接修改坐标以期达到最佳测量状态,试行一遍后,再回到GENCIR(生成圆)输入一个叹号变成(!GENCIR)这样安全点就在程序里被记录,在测量过程中不会产生不良影响。以上五种方法是三坐标自动测量时常用的安全点设置方式,在实际测量过程中要合理选择,使其测量过程安全快捷,测量结果准真有效。
3 结语
安全点(CLP)其设定方式多种,除了以上方法,还有回退距离设置法、搜索距离法等特殊方式,但安全点的使用和设置是三坐标测量系统建立安全路径的重要环节,它的正确与否将直接影响自动测量的安全性和检测效率,所以我们应该熟悉安全点的设置方式和适用范围,根据产品特性因地制宜建立安全路径,保证测量工作的顺利进行。
参考文献
[1] 海克斯康测量技术有限公司,实用坐标测量技术[M].北京:化学工业出版社,2017.
[2] 周开俊,肖轶,周小青.基于遗传算法的三坐标测量机测量路径规划方法[J].中国机械工程,2016,27(12):1626-1631.
[3] 吴凤和,孙迎兵,王鑫.基于HCGA的三坐标测量路径优化[J].计量学报,2016(3):235-240.
[4] 李朋雪,王丹,艾才垚.三坐标多工位测量方法设计及应用[C].四川省机械工程学会第三届学术年会论文集[C].四川省机械工程学会,2018:198-203.
[5] 张虎,张润,于连栋.基于CAD模型的三坐标测量机测量点分布规划[J].自动化与仪表,2019,34(2):1-4,10.
[6] 杨柳.三坐标测量机的坐标系建立[J].现代制造技术与装备,2019(7):222,224.
