基于随机森林算法与无人机在边坡破损辨识中的应用
2020-03-02方晨曦
■方晨曦
(福建省公路管理局路网应急保障中心,福州 350004)
1 引言
据《福建省“十二五”地质灾害防治规划》统计,全省现有地质灾害隐患点1.2 万处,威胁人数20 多万,威胁财产50 多亿元。 在地质灾害产生如此不利的影响背景下,《福建省“十三五”综合防灾减灾专项规划》针对性地提出要强化山洪与地质灾害的监测预警和综合防治,健全灾害监测预警网络。面对严峻灾情,防灾减灾技术的研究与发展无疑具有重要意义。
滑坡是公路工程建设中常见的一种病害。 对公路工程建设的危害很大,轻则影响施工进度,重则破坏建筑结构。 滑坡通常造成阻断交通,影响公路交通运输生命线;大规模的滑坡,更可能摧毁公路,阻塞河道、掩埋村庄。对滑坡建立有效的监测系统, 既有利于我省采取措施避免滑坡的发生,进而减少滑坡发生后的人身财产损失[1,2]。
滑坡灾情监测是一门整合性很强的应用技术, 传统的大地观测法、 仪表观测法、GPS 观测只能进行点监测,在利用监测点监测变形体时,因为测点数量有限,难以反映边坡体变形的细节和全貌。特征信息不够全面,无法获取其他部位或整个地质体的空间位移模式。 随着数字相机在像素与分辨率的技术进步, 加上图像处理定位技术高精度与实时化的发展, 近景摄影测量因不需要登临边坡现场布点,作业简易且成本低廉,该技术在公路边坡监测或滑坡监测方面具有相当的应用与发展潜力。
2 无人机简史
无人机(Unmanned Aerial Vehicle,UAV)的发展可回朔至第二次大战之前,早在1896 年美国史密松研究院的山姆蓝利, 已设计出翼展4m 长小飞机, 飞行距离约为1km,随后在美国海军的支持下,成功地运用了陀螺仪的稳定定向性, 设计出翼展6.7 m 与机长4.6m 无人飞机,于1918 年试飞,但很可惜试飞并未成功。 成功应用遥控技术的无人飞机, 是在1935 年由美国陆军开发出的RP-1,曾经量产数架,主要供作练习靶机用途[3]。 1942 年德国也研制出V-1 无人飞机,用于载弹攻击,成为后来巡弋飞弹先驱。 美国雷昂航空研发公司,于1951 年正式首飞喷射动力式无人飞机, 其代号为火蜂(Fire Bee-BQM34),时速可达600 节,飞行高度6 万英呎。1961 年美国于越战中大量使用火蜂(147 型)无人飞机,执行了3945次任务,回收率高达84%,其后持续积极发展相关研究,1971 年试装小牛飞弹, 用于搜寻地对空飞弹发射系统,1980 年以色列于UAV 领域中有了大幅进展, 其主要为空中情资搜集,以实时回传方式,与后方攻击部队连成一线, 提供了最具机动性与攻击性的网络,1991 年波湾战争,更将UAV 的技术推向更高阶的发展,无人飞机定位精准可提供火炮定位之用,1999 年的科索夫战役更发展出图像实时传输技术, 达到更深入的监测与更精准的情资,可见早期UAV 研究集中在军事领域[4-10]。 2018 年8月,美国国防部发布无人系统第五版路线图《2017—2042 年无人系统综合路线图》,全面指导军用无人机等无人系统在作战中的发展,明确相关投资领域及未来25 年无人机系统在互用性、自主性、安全网络和人机协同四个主题的发展方向[11]。
随着技术的不断进步, 无人机除了在军事上有了更多的应用外,也逐渐在商用和民用领域得到推广。 20 世纪80 年代以来,通讯技术和计算机技术迅速发展,可用于无人机的新型传感器及小型数字化探测设备成功研发,无人机呈现出多机型、多用途、多种载荷能力和多种续航能力的发展态势。目前世界范围内不同性能指标的无人机已超过百种,应用涵盖军事、灾后搜救、防灾减灾、数据采集、网络服务、图像拍摄、快递业务等多种领域[12,13]。
我国无人机遥测应用技术研究开发已有近20 年的时间。 1999 年完成了“无人机遥测系统关键技术研究与验证试验”项目,研制出以遥控方式为主的“I 型无人机遥测监测系统”;2003 年实现了无人机遥控、半自主、自主三种控制方式,并开始自行研制开发可低空低速飞行、适合城市地区应用、能获取高分辨率遥测图像的“I 型无人飞艇低空遥测系统”,同年在数字威海三维地理空间基础框架项目实施过程中,以飞艇作为飞行平台,完成了国内首次使用无人驾驶飞行器拍摄大面积遥测图像的任务[9]。
3 国外使用无人机减灾防灾现况
日本的民用无人机开发较早, 在1983 年YAMAHA公司采用摩托车发动机, 开发用于喷洒农药的无人直升机,1989 年成为实际首架成功用于试飞的民用无人直升机,2002 年CERP 公司发明JAXA 多用途民用无人机;2003 年起岐阜工业协会先后开发了4 代无人机产品,主要应用于森林防火、地震灾害评估等领域。日本减灾组织使用无人机携带高精度数码摄像机和雷达扫描仪对正在喷发的火山进行调查, 抵达人们难以进入的地区快速获取现场实况; 日本环境省利用无人机加载核生化传感器进行核污染监测,对不同地理环境、不同埋藏深度的辐射源辐射强度进行量化研究, 为核电站及其他核设施的管理提供基础数据。
美国NASA 牵头成立世界级无人机应用中心,2003年美国NASA 成立世界级的无人机应用中心, 专门研究装有高分辨率相机传感器无人机的商业应用。 近年美国国家海洋和大气管理局用无人机追踪热带风暴有关数据,借此完善飓风预警模型。 2007 年森林大火肆虐时,美国宇航局使用 “伊哈纳” 的无人机来评估大火的严重程度,以及灾害的损失估算工作。 2011 年墨西哥湾钻井平台爆炸后艾伦实验室公司的无人机协助溢油监测和溢油处理等。 美国运输部示范性地建立了无人机遥测系统,将其应用于快速获取道路运输网络的图像并对所得信息进行快速分析, 用无人机取得实时遥测图像对地震后出现问题的道路和桥梁进行评估, 用以快速确定震后救灾路线[12]。
以色列也专门组建了一个民用无人机及其工作模式的试验委员会,2008 年给予“苍鹭”无人机非军事任务执行证书, 并与有关部门合作展开多种民用任务的试验飞行。 欧洲在2006 年制定并即刻实施的“民用无人机发展路线图”, 欧盟拟筹措一个泛欧民用无人机协调组织,为解决最关键的空中安全和适航问题提供帮助。 迄今无人机已成为各国发展防灾减灾技术的必要工具[12]。
4 我国使用无人机减灾防灾的状况
目前国内无人机遥测飞行平台有固定翼无人机、无人直升机、多旋翼无人机与混合翼无人机等,以固定翼无人机为主,但随着近景摄影测量技术快速发展,基于多旋翼无人机与混合翼无人机的遥测逐渐盛行。 固定翼无人机按照用途又可分为测绘型、监测型、长航时型和高升限型。 通用测绘型无人机目前装备数量最多, 升限4000m以下,续航能力2.5h,巡航速度120km/h,起飞总重量20~30kg,3~4 人操作,除50~100m 普通硬质平坦地面滑跑起降外,也可弹射架弹射起飞,伞降或撞网回收。 搭载数码相机进行低空航空摄影测量,主要用于小区域1∶2000 或更大比例尺测图,如图1 所示[6]。
监测型无人机升限4000m 以下, 起飞总重量5kg 左右,续航能力1h,巡航速度80km/h,单人可携带,2~3 人可操作,无需专用场地,可通过手抛或弹射起飞,伞降回收,主要搭载视频摄像头,可实时传输和视频拼接制图,主要用于应急监测,如图2 所示。

图2 监测型无人机[6]
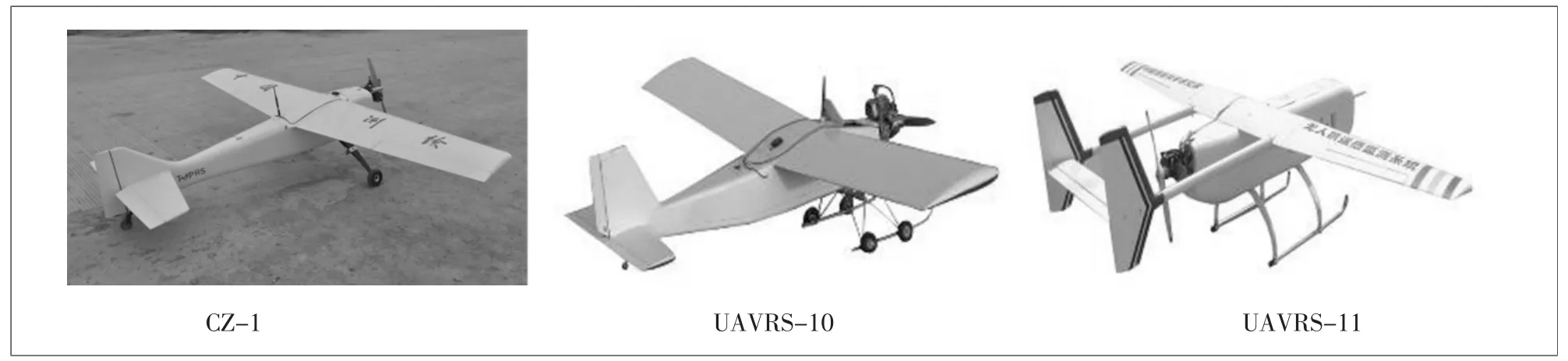
图1 通用测绘型无人机[6]
长航时型无人机升限5000m,续航能力可达16h,起飞总重量21kg, 巡航速度100km/h, 作业半径可达600km,3~4 人操作,通过300m 长公路,车载弹射起飞或地面弹射架起飞,直接机腹摩擦着陆,主要用于远离大陆海岛礁等困难地区航空摄影测量,如图3 所示。

图3 长航时型无人机[6]
高升限型无人机升限可达6000m, 起飞总重量15kg左右,3~4 人操作,滑跑起飞降落,主要用于青藏高原等高海拔地区测绘,如图4 所示。
多旋翼无人机是由多个旋翼动力组所组成的飞行器。 与直升机一样,具有垂直起降的功能。 根据载台的酬载与滞空能力,又可分为小型与大型两种型态。小型的多旋翼系统可以搭载200g 左右的任务载重(机体以外设备重量),适合用于短距离的监控任务,因为其云台具有水平90 度转动与自动补偿的功能,因此也可用于小范围的垂直拍摄运用。大型的多旋翼系统可以酬载1~10kg 以上载重,并进行30min 以上飞行,适合用于小范围长时间的监控任务,或是搭载单眼数字相机,以取得较佳的图像质量。 一般飞行高度低于100m,由1~2 人操作,如图5 所示。
图4 高升限型无人机[6]

图5 多旋翼型无人机
混合翼无人机(垂直起降)由定翼与多旋翼动力组组成,具有两种机型的优点。 与多旋翼无人机比较,能有较长的飞行时间,较大的载重能力。 与定翼无人机比较,有较好的操控性,较低的飞行高度(低于200m),由1~2 人操作,如图6 所示。
国内无人机遥测系统使用传感器的类型主要有数码相机,视频摄像机,LIDAR,多光谱相机,磁力仪,风、湿、温和气压传感器,高光谱相机,合成孔径雷达,红外辐射计,气溶胶传感器。 2018 年起,机载传感器装备的主要以4000 万像素面阵数码相机为主,具备曝光触发和曝光脉冲输出记录能力,可连续拍照,大重叠度摄影(一般大于80%), 经过精确几何标定, 具备测绘需要的完整相机参数。测绘专用飞控系统具备精确导航功能,自动引导飞机按照设计航线飞行,根据设计曝光点进行定点曝光控制,具备精确计算曝光点坐标能力, 具备控制传感器云台修正姿态角能力。

图6 混合翼型无人机[6]
在“十一五”与“十二五”期间,无人机平台在国家相关单位和技术人员针对无人机服务于地理国情监测的应用做了大量的研究和尝试下, 被广泛应用到国情监测领域,主要包括农林遥感、国土监测、环境监测、海洋监测、地质矿产勘察、测绘制图、气象预测、灾害应急服务等[4,6]。
2005 年,北京大学与中国贵州航空工业集团有限公司联合研制的多用途无人机遥测系统在贵州省黄果树机场首飞实验成功, 采用了中国科学院遥测所研制的先进高分辨率数码相机系统;2008 年我国天灾频发, 在年初的雨雪冰冻灾害中, 国家民政系统第一次将无人机遥测资料应用于救灾抢险, 同年汶川大地震中无人机更是承担了及时获得震后灾区动态变化情况的重要任务, 为救援、灾情评估、地震次生灾害防治和灾后重建工作提供了第一手的信息和科学的决策依据。 2010 年,国内研究人员以鄂尔多斯市东胜区航拍数据资料为基础, 对区域土地利用动态监测的应用进行了技术探索和应用实践, 验证了无人机在区域土地利用动态监测中应用的可行性。 此后,无人机基于不同类型的灾害防治有了不同的技术性提升, 在我国防灾减灾领域发挥越来越重要的作用。
在防灾减灾领域, 遥测与近景摄影测量技术可以调查掌握地质灾害的现状、变化规律和特征,预测其发生发展的趋势,开展灾害监测与灾情评估,达到防灾减灾的目的。 无人机遥测具有高时效、高分辨率的性能,这是传统卫星遥测所无法比拟的,具有广阔的应用前景。 此外,无人机遥测还有机动性强、 获取数据快速和可以低空飞行的特点,结合遥测数据处理、建模和应用分析技术方法,能够完成地质灾害监测、应急救援和灾情评估任务,为地质灾害的预防与救援方案的快速制定提供准确依据。 为表征无人机技术应用于公路边坡防灾技术。 课题比较福建省宁德市与陕西省西安市两个案例,如表1 所示。

表1 应用无人机在边坡防灾减灾案例比较
比较差异可知两案例都是采用集成无人机、 近景摄影测量与人工智能技术,建立公路边坡三维模型,并比较变形差异,获得公路边坡防灾减灾的应用成果。西安市公路局花费较多经费采集当地土质、边坡构造、雨量、基于无人机的雨中边坡变形监测数据, 在雨中监测与预警及应急封闭交通两方面获得较明显的效益。
5 基于随机森林算法的滑坡辨识技术
前述文献回顾表明无人机的近景摄影测量技术是公路防灾的重要核心方向之一。 许多文献基于无人机勘查数据与多种机器学习算法进一步分析, 随机森林算法(Random Forest Method)是机器学习分类树中分类能力较好的一种算法。 其基本原理是结合多个分类与回归树(CART Tree),基于集成方法(Ensemble Method),并加入随机分配的训练数据,大幅增进最终的运算结果。基本思路是如果单个分类器表现高于门槛值(一般设定为分类能力大于0.5),且多个分类器间彼此具有差异性,将多个分类器组合起来,其分类成果有较大可能优于单个分类器。组成的方法是通过装袋算法(Bagging)方式,较适用于复杂分类(如滑坡辨识等),除了传统C4.5 决策树算法的优点外,随机森林算法能观察每一个特征的重要度,这是许多机器学习算法无法实现的。 图7 示出了随机森林算法的计算过程。 随机森林的优点是: 相较于传统决策树方法,分类能力较好;可以处理大量的输入变量;在决定类别时,评估变量的重要性;在建造森林时,可以在内部对误差产生不偏差估计;可以估计遗失的数据,在数据遗失时可以维持准确度;提供侦测变数相互影响的方法;对不平衡分类数据集,可以平衡误差;计算亲近度,对于数据挖掘、侦测偏离者和将数据可视化非常有用;可被延伸应用在未标记的数据上, 这类数据通常是使用非监督式聚类;也可侦测偏离者和观看数据;学习过程较快速;花费硬件资源远比深度学习少[14,15]。
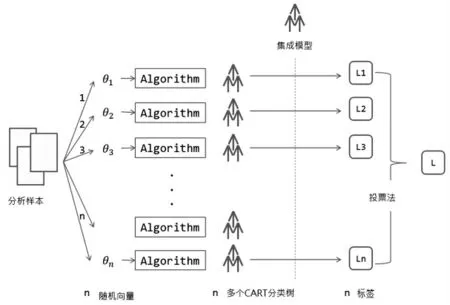
图7 随机森林算法的计算过程
将滑坡图像通过图像滤波器, 标记滑坡位置如图左图, 经过切割后可得到右图样本。 课题搜集福建省边坡89 个边坡图像, 通过左右镜射将样本扩增为178 个样本,每个样本正规化为150×150 的图像。 通过集成VGG模型与与随机森林算法,可以获得如图9 的计算流程。图9 中最右侧1×5 的矩阵中代表的是巨型、特大型、大型、中型、小型的机率。
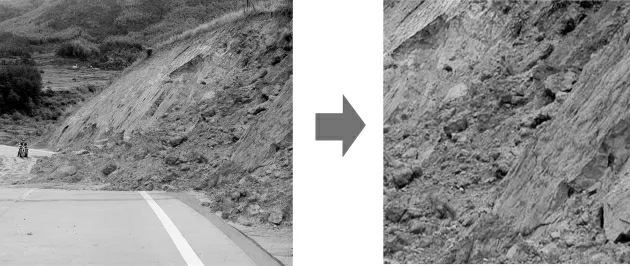
图8 标记滑坡位置后的局部图像
表2 表征提出方法的预测结果, 表明所提出方法的正确性较高,适用于边坡滑坡的分级。
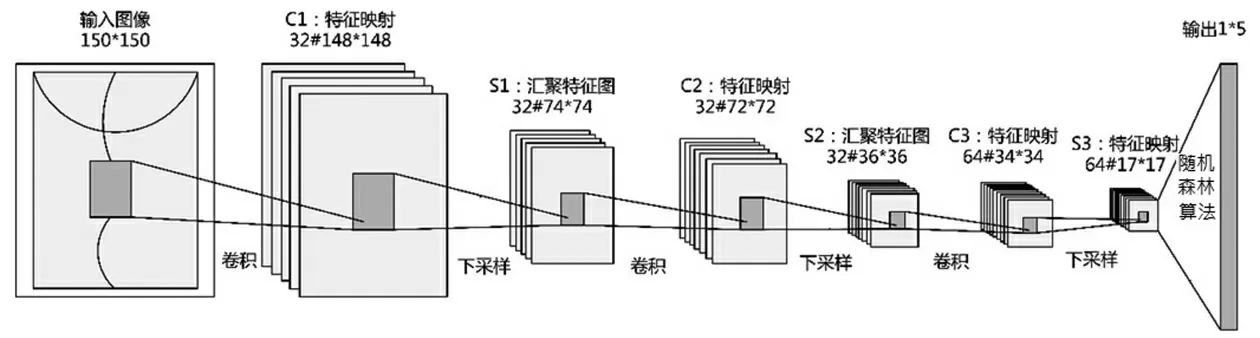
图9 VGG 模型与与随机森林

表2 滑坡等级识别准确率
6 结束语
在总结无人机发展简史, 国内外使用无人机防灾减灾案例与文献趋势调研与发展现状的基础上, 分析未来使用无人机在防灾减灾用途的整体功能智能化的趋势。比较我省宁德与陕西西安两市使用无人机的效果, 并用随机森林法分级边坡滑坡。 表征使用无人机投入公路防灾减灾的有效性。