基于机器视觉技术的打狗河大桥工程质量安全检测
2020-03-01潘富远
潘富远
摘要:目前,大多数桥梁检查都是通过人工计算裂缝数量、测量裂缝的长度和宽度并拍照来完成,桥梁诊断报告的质量和可靠性在很大程度上取决于检测人员。文章提出了一种桥梁安全状态检测机器人系统,该机器人系统被开发用来收集准确的数据,以记录桥梁的安全状况变化以及检查桥梁的安全状况,并通过打狗河大桥桥梁裂缝检测实例,介绍了机器视觉技术在桥梁结构安全检测中的应用。
关键词:打狗河大桥;桥梁检测;机器人系统;机器视觉技术
中国分类号:U446文献标识码:A
0 引言
桥梁检查是一项关键任务。国内的桥梁数量逐渐增加,因此需要耗费更多人力物力进行检查。目前我国有超过100万座桥梁,成为世界第一桥梁大国。此外,自1995年以来,桥梁的维护和维修费用每年都在迅速增加,近10年来增加了200倍。因此,通过精确的诊断,寻找一种更有效、更经济的桥梁维修方法显得越来越重要[1]。
虽然机器人技术已经在许多工业领域得到了发展,但在实际桥梁的安全诊断和维护方面,机器人应用技术却相对滞后,直到最近,桥梁的检查和维护都还是由在户外工作的训练有素的检查人员手工进行检查。检查人员通过计算裂缝数量,测量裂缝线的最大宽度和长度,并对其进行拍照,检查桥梁下表面的安全状况。因此,基于检查人员的努力程度不同,诊断报告的准确性和质量变得相当主观,结果也不尽相同。此外,由于桥梁检查是在室外进行的,特别是在桥梁下方,因此可能存在检查人员的安全问题,在桥梁检查期间可能会造成工伤事故。除了降低成本外,改善工作环境已成为桥梁检测的主要考虑因素之一。为了解决这些问题,本文提出了一种基于机器视觉的桥梁检测机器人系统。检测机器人能够将传感器发送到不可接近或危险的区域,从而使检测人员更安全[2]。
1 机器人结构与控制系统
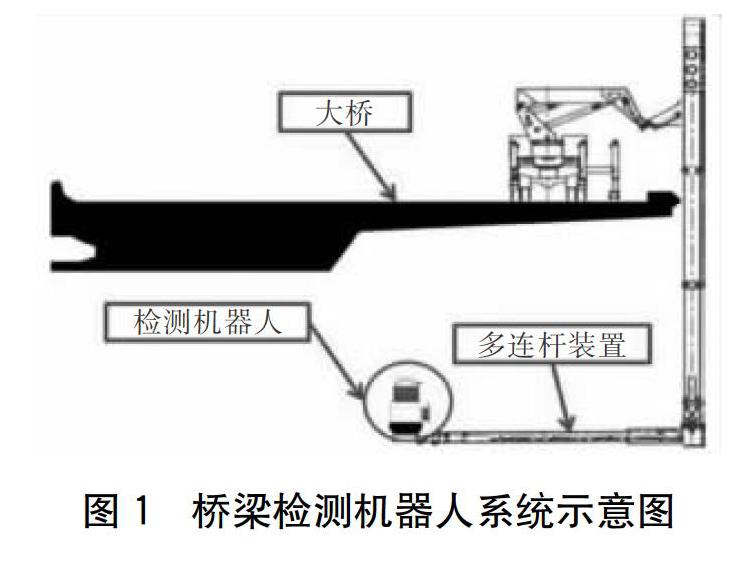
桥梁检测的整个机械系统由专门设计的车辆和安装在专门设计的结构上的检测机器人组成(如下页图1所示)。特别设计的汽车具有七自由度多连杆装置,并配有液压执行装置系统,该多连杆装置是为检测机器人系统检测桥梁下表面而设计的。同时,设计了安装在多连杆系统末端的检测机器人,使其具有三自由度并联机构,配备电动执行装置(马达)系统、机器视觉系统和各种传感器。安装在检测机器人末端的机器视觉系统能够检测和发现桥下的裂缝。由于多连杆系统的主要目标是将检测机器人送至待检测位置,因此其工作空间较大。
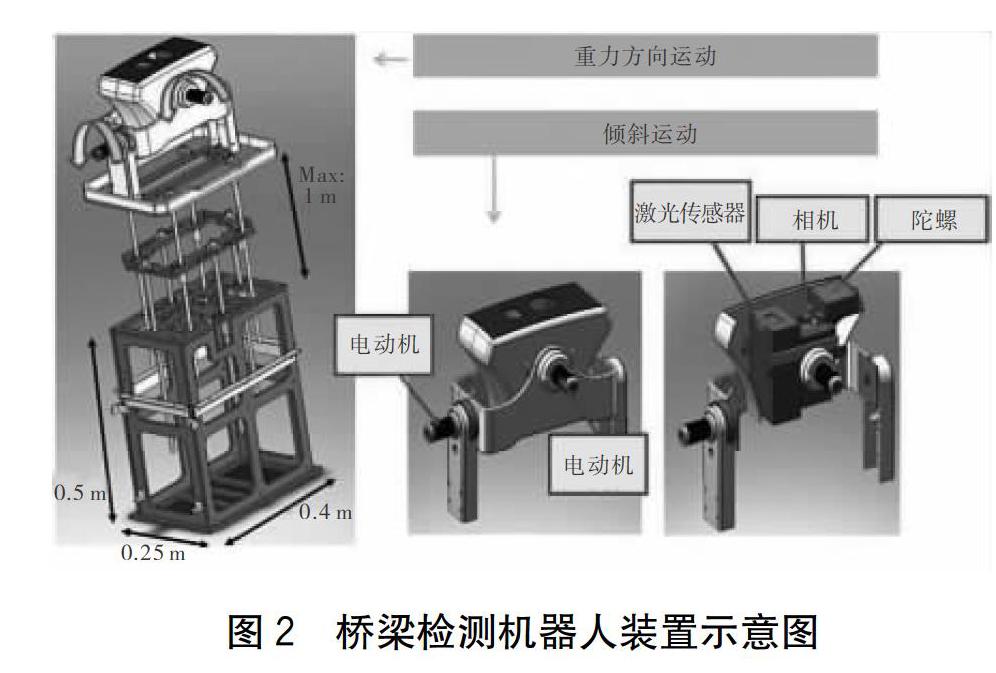
如图2所示,检测机器人由机器视觉系统的旋转关节装置和用于重力方向运动的棱柱(上/下)关节装置组成。此外,摇摄和倾斜装置配备有陀螺传感器、激光传感器和机器视觉(照相机)系统。上/下运动通过两级装置实现,两级装置通过类似肌腱驱动的方法进行工作,通过两级装置进一步的扩展尽可能使机器视觉系统接近桥下表面。在这里,两级装置最大向上行程大约为1 m。这个大的向上行程是为了捕获桥下的精确裂纹图像,并计算裂缝的长度和宽度。
2 机器视觉系统
机器视觉系统的目的是从采集的图像中自动检测桥梁下表面的裂缝。事实上,根据桥梁的类型,损伤有很多种,如裂缝、腐蚀、沉降等。在这些损伤中,裂纹信息成为决定桥梁修复的最重要因素之一。其所采用的机器视觉系统由电荷耦合器件(CCD)摄像机、数字录像机(DVR)和服务器计算机上的视觉处理程序组成。为了确定机器视觉系统的技术指标,我们考虑了机器视觉系统的重量、供电电源、与服务器的通信方式和电缆类型,并通过RS485通信对CCD摄像机的焦距进行远程控制[3]。
2.1 裂纹检测与跟踪
现有的裂缝检测方法大多只显示检测裂缝,而为了评估桥梁的安全性,应通过固定时间间隔的桥梁检测报告来估计裂缝的发展速度。为此,应每隔一年收集和累积有关裂纹长度和宽度的信息。通常,在裂缝检测中,由于桥下跨间支撑梁的作用,存在裂缝形状和尺寸不规则、表面脏污和油漆不均匀、照明条件不规则等问题,这些都可能给实现裂纹自动检测带来困扰。针对这些问题,我们分别提出了裂纹检测算法和裂纹跟踪算法作为裂纹图像自动处理的两种方法。
2.2 BMS数据库的后处理
对于检查人员来说,可通过缝合相邻图像获得的全景图像,连接每个图像中的相同特征点,顺序地执行缝合处理,然后将包含整个裂缝线信息的全景图像转换为桥梁管理系统(BMS)要求的文件格式(这里是与CAD文件兼容的DXF格式)。我们仔细研究了DXF文件格式的结构,解析了各个组件的语法,以便将检测到的裂纹信息写入DXF文件格式。
3 机器视觉技术在实际工程中的应用
3.1 工程概况
打狗河大桥位于河池市南丹县打狗河寨附近,跨越打狗河。桥位处河面宽度约50~60 m,河水流速较急,桥梁中心桩号为K6+285,全长158.12 m。本桥上部构造采用5×30 m预应力混凝土简支T梁,交角90°,桥面净宽7.5 m;下构桥墩为双柱式墩,3#桥墩采用明挖扩大基础,其余桥墩采用桩基础。桥台为柱式台,桩基础。桥面的结构形式为15 cm厚C50混凝土桥面铺装。本文以打狗河大桥安全检测为例,从其施工期间开始,每隔一年进行一次安全检测,追踪大桥有效裂纹的变化情况,为提出有效修整措施提供客观依据。
3.2 图像处理
由于每座桥梁都有自己的形状,因此在进行桥梁检查之前需要进行任务规划。桥梁检测任务规划的目标是获取清晰的原始图像。为此,桥梁下表面与机器视觉系统之间的距离应保持恒定,以保证透视图像的恒定。同时,机器视觉系统的方向应与桥表面保持正交,以保证每幅图像的像素分辨率恒定。通过对图像的分析,预先确定特征点的位置作为桥梁形状的变化点。
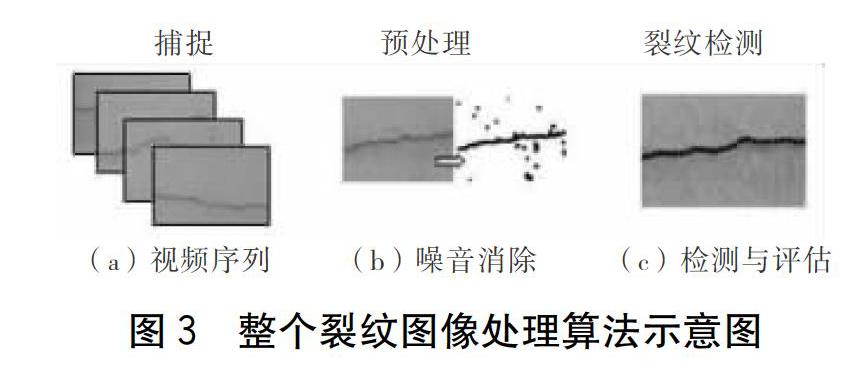
如图3所示,为打狗河大桥底面裂纹图像捕捉以及相关处理顺序。在捕获裂纹图像之后,使用中值滤波器来实现去除伪影以增强图像的预处理,然后采用裂紋检测和跟踪算法计算出相应裂纹的长度和宽度,并通过图像拼接对合成全景图像进行后处理,最后将包含长裂纹信息的合成全景图像转换为桥梁管理系统数据库所需的数据格式。整个图像处理将近200 ms,也就是说,机器视觉系统以5 帧/s的速度捕获图像。
在对桥梁进行检测时,虽然检测机器人系统采用了闭环控制系统来保持摄像机系统的距离和方向不变,但由于突然的风和未知的干扰,摄像机可能会发生抖动,从而使采集到的图像变得模糊。在某些情况下,模糊图像的裂缝检测结果并不能保证裂缝信息的准确性,而且在同一位置重拍照片也很困难。因此,应用文中的图像去模糊处理技术来提高检测结果,而机器视觉系统能够利用这个过程恢复模糊图像,检测人员不仅可以获得良好的视觉效果,而且可以从恢复的图像中获得可靠的裂纹检测信息。
3.3 结果分析
我们评估了机器视觉系统对含噪图像的自动检测方法,这是由于在获取桥梁表面真实图像时,存在着光照条件不规则、表面有阴影和污渍等问题。这些问题可能导致错误的检测结果,因此,噪点图像中裂纹检测的准确性是评价桥梁检测机器人系统性能的重要因素。在打狗河大桥检测过程中,我们获取了近100幅有噪点的图像,这些图像具有不规则的光照、不同的阴影条件和混凝土桥梁表面的瑕疵,因此图像除噪就显得尤为重要。根据打狗河大桥初次监测结果显示,大桥检测裂缝宽度均<0.1 mm,为非有效裂缝(当裂缝宽度>0.25 mm时需要补修),因此不需要补修。而此次检测的主要目的是建立打狗河大桥裂缝信息,为后期追踪记录提供信息基础,以便更好地研究大桥裂缝变化过程,为后期大桥检修提供客观依据。
4 结语
为满足桥梁检测的实际需要,本文提出了桥梁检测机器人系统。这一系统由两个主要部分组成:机器人结构和控制系统以及机器视觉系统,用于桥梁裂缝的自动检测。通过在打狗河大桥上的试验,证明了所提出的机器人运动控制方法的有效性,所提出的裂缝检测方法在寻找桥梁结构的裂缝方面取得了良好的效果,为发展机器视觉检测技术作出了一定贡献。
参考文献:
[1]张维峰,刘 萌,杨明慧.基于数字图像处理的桥梁裂缝检测技术[J].现代交通技术,2008,5(5):34-36.
[2]张国旗.基于图像处理的混凝土桥梁底面裂缝检测方法的研究[D].北京:北京交通大学,2010.
[3]瞿 中,郭 阳,鞠芳蓉.一种基于改进渗流模型的混凝土表面裂缝快速检测算法[J].计算机科学,2017,44(1):300-302.
