实景三维空间信息模型技术在长江大保护建设中的应用
2020-03-01周亚超
周 伟 周亚超
中国建筑第二工程局有限公司 北京 100010
1 项目总体概况
长江大保护岳阳项目王家河项目总投资7.32亿元,建安费5.55亿元。王家河全长约7 km,平均水深约2 m。项目主要建设内容包括新建管网55 km、新建调蓄池1座(20 000 m3)、生态滤池1座(10 000 m3/d)、河道清淤及淤泥处理(162 900 m3)、14处排口强化、7套水动力提升设备、管网清淤及修复(图1)。
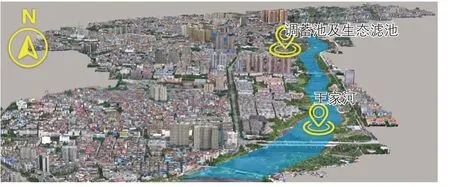
图1 王家河项目区域
王家河项目点多面广、施工区域分散,施工范围区域面积约10 km2。项目通过倾斜摄影技术和激光雷达技术的融合建立王家河项目实景三维空间信息模型,以减少现场踏勘、测量等工作量。其中无人机激光雷达技术的应用,能提供植被覆盖区域地面点的准确高程。
2 相关技术应用简介
2.1 倾斜摄影技术
倾斜摄影技术通过从不同视角同步采集影像,获取空间物理信息,通过数据处理、融合、建模等技术生成高分辨率、高精度的三维城市模型[1]。王家河项目倾斜摄影技术达到的分辨率为3 cm,模型能够真实地反映王家河项目区域情况,还可以进行空间信息数据的获取。
2.2 无人机激光雷达技术
无人机激光雷达技术是在无人机上搭载激光雷达平台,通过发射激光光束实现空中探测目标,以生成精确的三维立体图像[2]。王家河项目部分区域地形起伏、植被多,利用激光雷达可以穿透植被准确地获取高精度空间环境信息的优点,将雷达数据与倾斜摄影数据融合,达到提高模型精度的目的,完成后可自动生成DEM(数字高程模型)、等高线、DLG(数字线划图)等。
2.3 实景三维空间信息模型
通过倾斜摄影技术和无人机激光雷达技术构建实景三维空间信息模型,其主要分为2个步骤:一是外业数据采集,二是内业数据处理。其中内业数据处理包括多次空三解算、mesh三维模型及初修、雷达数据与三维倾斜模型融合等。通过实景三模模型可以直接查看每个区域的实际情况,可获取模型中每个点的空间数据(坐标、高程等)、挖填方量等,同时为项目后期建立空间地理信息数据专题库提供基础数据,提升运营管理效率。
3 项目应用过程
3.1 飞行平台和航摄设备准备
1)飞行平台:大疆M600型,单架次续航时间约25 min,正常续航速度60 km/h,六旋翼无人机,采用自主飞行模式,航线自动生成,航向分辨率不低于75%,旁向重叠率不低于70%。
2)航摄相机:五镜头相机(赛尔100S),总像素为1.2亿,焦距为35 mm。
3)雷达设备:无人机(大黄蜂)1台、机载雷达(瑞格)1台。单次飞行30 min左右。
3.2 无人机作业
无人机作业流程如图2所示,作业成果如图3所示。

图2 航空摄影测量工作流程

图3 拍摄成果
3.3 雷达作业
雷达作业流程如图4所示,作业成果如图5所示。
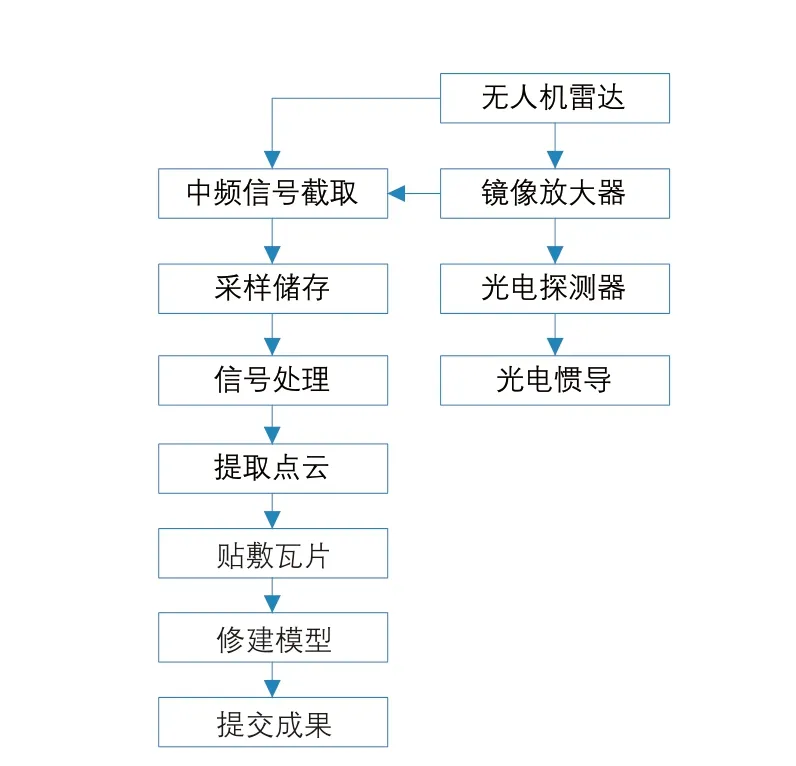
图4 雷达作业流程

图5 点云解算成果及DEM成果
3.4 操作要点
3.4.1 准备阶段
1)作业前需确定测区是否为禁飞区或限飞区,并办理相关手续。王家河项目西侧有铁路线路,作业前需提前与铁路公安进行对接。
2)根据项目原始地貌要求确定建模精度,采取航拍照片3 cm分辨率精度,建立1∶500地形模型。
3)分析现场障碍物,确定航测无人机飞行高度,如果存在较高建筑物或其他障碍物,采取对影响飞行的障碍物区域单独航拍的方式解决。
4)现场踏勘确定无人机起飞、降落地区,防止无人机使用时因环境因素影响航拍效率。
5)像控点布设:
① 像控点的数量及精度会直接影响航测生成模型的精度,对像控点的选择与布设应当严格、规范、精确。
② 项目像控点采取每300 m布设一个点,成矩形排布,点位使用红色油漆喷涂标记。
③ 像控点布设采用GPS测量仪,按布点位置记录该点位的原始坐标信息(经纬度及高程)。
3.4.2 外业采集阶段
1)根据无人机单次飞行时间制定测区布设,对单次飞行路线提前制定,并设定拍摄距离。
2)无人机航测区域要求:以项目红线范围为界,超过约200 m。其目的是保证红线区域模型建立的精确性。
3)无人机航测过程中的照片POS数据采用PPK天线与地面GPS测量仪进行确定,保证照片定位数据精度满足建模精度要求。
4)航测过程中必须保证天气条件为阴天或者晴天,确保整个过程的安全性。天气条件对后期模型的生成效果也有影响,应避开雾天、霾较重的天气。
5)控点布设时,必须采取双人协作,避免单人作业不易发现危险源,从而导致安全事故发生。
6)任何人不得在无人机起飞、降落时靠近无人机。
3.4.3 内业数据处理阶段
1)将GPS记录的点位数据导出,将坐标信息与照片重新加载,实现照片POS数据更新。
2)在Smart 3D软件中导入航测影像及更新后的POS数据,在软件端进行第1次空三解算。因为航测面积大,无人机采集的数据量极大,所以空三解算消耗资源多、时间长,通过第1次空三解算测试影像和坐标信息的正确性。
3)复测解算完成的点云数据。无大的坐标偏差问题后,对图像进行“刺点”操作,即将航测前期确定的像控点坐标在图像中一一对应定位,提高模型生成精度,由真实点位坐标控制模型点位坐标,减小累计误差。
4)完成第2次空三解算后,对模型进行渲染生成,选择输出OSGB格式模型。
5)模型渲染完成后,需要针对模型明显缺陷进行修补,主要修补部分为水面、大型玻璃幕墙、路面等。
6)模型点位数据导出时,点位设置为每0.5 m一个,地势变化较大的区域单独增加点位,保证数据提取精细度。
3.5 模型精准度抽验
随机抽取模型数据,与GPS RTK数据进行对比。当对比数据偏差较大时,应进行相关区域的技术复核。
4 实景三维空间信息模型成果应用
4.1 高度及距离测量
模型生成后,距离量测、坐标获取、高程获取、土方量计算等测量工作可直接在模型中提取数据,各类数据完全满足设计、施工需求。
4.2 土方量计算
采用土方量自动计算功能。通过定义挖填范围,直接提取相关土方量,辅助项目开展完成施工前策划,包括资源配置准备、土方量调配部署、进度计划的编制等,同时为后期结算提供参考依据。
4.3 坐标提取
现场施工过程中可直接利用模型进行坐标和高程提取。因三维模型与现场实际情况吻合,故展示坐标区域更加直观,便于具体位置的获取。
4.4 现场情况展示
由于三维模型精度较高,故现场情况可利用三维模型进行直观展示,减少现场踏勘工作量。
4.5 应用效果及效益分析
4.5.1 项目规划设计阶段
通过实景三维空间信息模型,大大减少了现场踏勘调研工作量,同时结合DLG线划图,极大地提高了设计的工作效率。设计院在向建设单位、政府部门汇报设计方案时结合该模型,大大提高了汇报的效率。
4.5.2 项目施工阶段
1)项目原计划配置8名测量人员开展项目原始地貌信息采集复核工作,通过本技术,只需配置5名测量人员及相应设备,大大优化了人员及设备配置,同时原计划50 d完成的测量工作仅花费了15 d时间。该模型生成的数据也得到了监理单位的认可。
2)项目施工单位在施工部署阶段,利用该技术进行现场踏勘、协调征拆、方案策划工作,特别是在编制交通导行、土方调配、材料堆放等方面发挥了极大的作用,大大减少了现场反复踏勘工作,提高了工作效率。
3)本项目部分新建管道工程紧邻小区房屋、街边商户施工,施工前需组织人力对沿线建筑物进行影像拍摄,避免施工过程中与建筑物权属人发生不必要的纠纷。该技术的现场影像采集工作,提前完成了上述工作,缩短了施工前准备时间,提高了施工效率。
4.5.3 初步产生的效益
该技术需采购专业的软硬件设备,成本较高。经测算,单个项目使用产生的直接经济效益基本与成本持平,因此需由公司统一采购,多个项目使用后,其软硬件成本将直线下降。本项目使用效益如下(不计算采购成本):
1)减少测量人员及设备配置方面:约20万元。
2)实地踏勘时间:每平方公里节约时间1.5 d左右,共计节约时间15 d。
3)成图时间:相较于传统方法,该技术可节约30 d。
4)减少复杂环境下进行踏勘时存在的潜在安全隐患。
5)在辅助施工部署策划方面间接创造了经济效益。
5 结语
通过项目实际应用,该实景三维空间信息模型具有精度高、可视化强、兼容性高等优点,解决了传统市政水务项目点多面广、施工范围环境复杂、踏勘工作量大、踏勘工作难等问题。同时,该模型为建筑业信息化技术应用提供了支撑,在类似工程施工时具有很好的应用前景。

[1] 吴国梅.基于倾斜摄影测量技术构建实景三维模型的方法[J].世界 有色金属,2017(9):296.
[2] 李清泉,李必军.激光雷达测量技术及其应用研究[J].武汉测绘科技 大学学报,2000(5):387-392.