基于无线通讯的AGV设计与实现
2020-02-25王国梁薛晓茹孙佳丽宫政
王国梁 薛晓茹 孙佳丽 宫政

摘 要:AGV在现代工业自动化系统中得到了广泛的应用和推广,但由于移动往往不能和其它设备组网,针对这个问题运用WBOX网络模块设计一款无线通讯的AGV,对AGV进行了硬件设计,同时对循迹算法进行改进。经实践表明,利用WBOX组网方式简单快捷,方便推广应用。
关键词:无线通讯;AGV;WBOX组网;循迹算法
中图分类号:TM73 文献标志码:A 文章编号:2095-2945(2020)04-0096-03
Abstract: AGV has been widely used and popularized in modern industrial automation system, but it is often unable to network with other devices because of mobile. To solve this problem, we use WBOX network module to design a wireless communication AGV, design the hardware of AGV, and improve the tracking algorithm. The practice shows that WBOX networking is simple and fast, and it is easy to promote and apply.
Keywords: wireless communication; AGV; WBOX networking; tracking algorithm
1 概述
自動导引车种类繁多,是工业移动机器人的典型代表,因其操作灵活、工作效率高、容易升级等优点,在现代工业自动化系统中得到了广泛的应用和推广[1-2]。但是由于AGV是移动的,往往不能和其它设备组网,无法实时控制,因此本文利用国内信捷公司推出的WBOX网络模块,设计一款无线通讯的AGV,可以进行组网建设,从而使AGV更智能化。
2 硬件设计
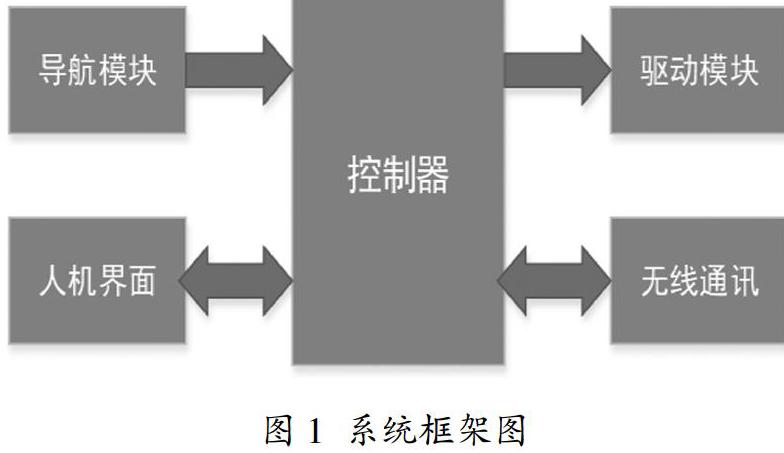
AGV小车一般应用于工业现场,所以选用抗干扰的PLC作为控制器,小车主要功能就是检测外界信号,判断行走路线并走到指定区域,所以由导航装置、驱动模块、无线通讯和人机界面几部分组成,具体框图如图1。
2.1 导航模块
AGV小车常用的导引方式有电磁感应、激光、磁带感应、陀螺仪等几种主流的导引方式[3],而磁带导引方式铺设成本低,相较于其他方式便于实施,不容易受外界环境的变化所影响,如光线的变化或者路面的污损,且它的成本低廉使用寿命长可靠性高。本设计采用的是磁带导引方式,它主要是在地上铺设磁条,然后通过磁导引传感器来检测当前位置,进行数据处理,从而达到导向的功能。磁带导引传感器能够检测微弱的磁场强度,这种传感器通常情况下分为很多点数,其中不同的点数也决定了他的精度不一样,与此同时其点数的间隔以及响应时间等都会对其有所影响,我们采用的WRG-016型的磁带传感器,它可以检测磁场的S极,具有16路开关信号,引脚定义如表1。
AGV属于移动装置,直流电源供电,因此选用直流无刷电机。我们选用尤奈特电机BM 1418ZXF型直流电机,它的额定功率为350W,额定转速为2800rpm,减速比为1:6,额定电压36V,直流电机与车轮利用链连接,达到传动的目的。采用差速型控制,即利用左右两个电机的旋转方向和速度的差值实现AGV的左右转、前进、后退和停止。
2.3 WBOX网络模块
WBOX是基于无线WIFI的数据通信模块,支持Modbus-RTU协议,无线端提供Modbus TCP协议,可以和xc系列PLC广泛应用于自动化系统,实现无线监控。AGV的控制器通过WBOX模块与无线路由器建立连接,从而使得AGV与上位机进行无线局域网通信。WBOX和PLC的连接方式如图2。
2.4 PLC选择及I/O分配
因为传感器是NPN输出型,所以PLC也要选择NPN型的输入,而且磁带传感器有16个端子信号,选择信捷XC5-32RT-C型PLC,由于需要的输入点比较多,所以增加一个扩展模块XC-C16X增加输入点。
具体的I/O分配如表2。
3 软件设计
3.1 PWM调速
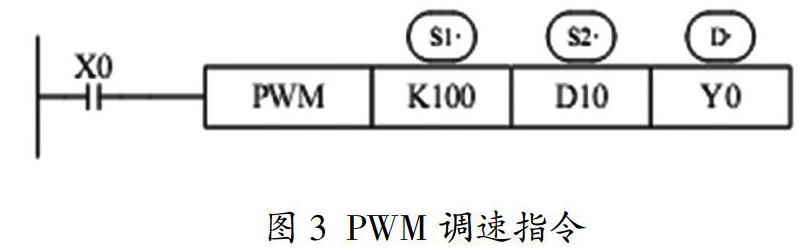
AGV主要实现小车的前进,后退和转弯,而转弯靠速差来实现,所以调速是重点,直接选用PWM调速指令如图3,对频率以及占空比大小进行调节,从而实现PWM调速。
占空比数值 n的范围为1~255,输出频率f的范围是0~72KHz,PWM脉宽调制输出的占空比=n/256×100%。
PWM脉宽调制输出是以0.1Hz为单位的,所以S2设定频率时,设定值是实际频率的10倍关系(即10f)。如要设定频率为72KHz,则S2中的设定值应为720000。X0为ON时,输出PWM波形;X0为OFF时,停止输出。PMW脉宽调制输出是不同于脉冲输出的,它的输出不累计的。
在梯形图中,我们可以将占空比以及频率都设成相应的寄存器,这样就修改寄存器的值就可调节速度,方便调试,程序如图4所示。
3.2 无线通讯配置
连接WBOX时,PLC串口需配置成一些参数,表3所示。同时将拨码开关S2置off,设为Modbus模式;配置完成后,由于Modbus通讯,编程直接运用通讯指令如REGW和REGR指令。
3.3 循迹算法
循迹算法设计是否合格的关键在于AGV机器人的运
行是否稳定,循迹路线是否与设定轨道一致。AGV正常运行时一般的当机器人在磁道正中间时磁导航传感器刚好可以检测到2路磁通量,当机器人发生偏转时16路传感器的磁通开关量可以本论文采用16路磁通开关量磁导航传感器,共16个输入信号,我们规定好AGV的行车线路,将1号磁通检测开关所在位置设定为左边,16号磁通检测开关所在的位置设定为右边,中间8、9磁通检测开关所在的位置为直线行驶中间位置。AGV小车直线前进时,8、9两个磁通检测开关应该是始终置on的,因为磁带有一定的宽度,而两个引脚之间的距离只有10mm,所以将7、10两个端子当做余量处理。一旦有7往前编号的开关量触发,即AGV向右偏转一定的角度。另一侧则AGV向左偏转一定的角度。根据信号值判断偏转角度的大小,然后调节转速差,从而实现循迹。
但是如果只要导引磁带与机器人有稍微的偏移,电机会立即做出调整,循迹过程中机器人的调整过快就会造成机器人沿着轨迹摆动,严重时出现发生剧烈的抖动。所以我们可以将1~6号端子分阶段,采用模糊控制,控制左右轮,以达到稳定的效果,向右偏转效果如左一样。具体循迹措施如表4所示。
4 结束语
本文论文对循迹算法进行了改进,使AGV的行走更平稳,采用WBOX模块实现了AGV的无线监控,解决传统AGV往往只能实现点到点的功能,使AGV更加智能化,该无线组网方式简单方便,可在更多的工控领域推广应用。
参考文献:
[1]刘懿锋,张瑜洁.自动化物流系统中AGV小车系统的应用探讨[J].中国设备工程,2018(16):135-136.
[2]张辰贝西,黄志球.自动导航车(AGV)发展综述[J].中国制造业信化,2010(01):53-59.
[3]杨美娟.磁导航AGV机器人关键技术的研究及应用[D].青岛科技大学,2018.
